门形叉车搬运系统的制作方法
本发明涉及货物装车,特别是涉及一种门形叉车搬运系统。
背景技术:
1、现有的货物转运、搬运都采用轮式叉车运输,而轮式叉车不能将货物直接从货车车厢的外部转运到车厢内部并进行装车码放。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种门形叉车搬运系统,解决现有的轮式叉车不能将货物直接从货车车厢的外部转运到车厢内部并进行装车码放的问题。
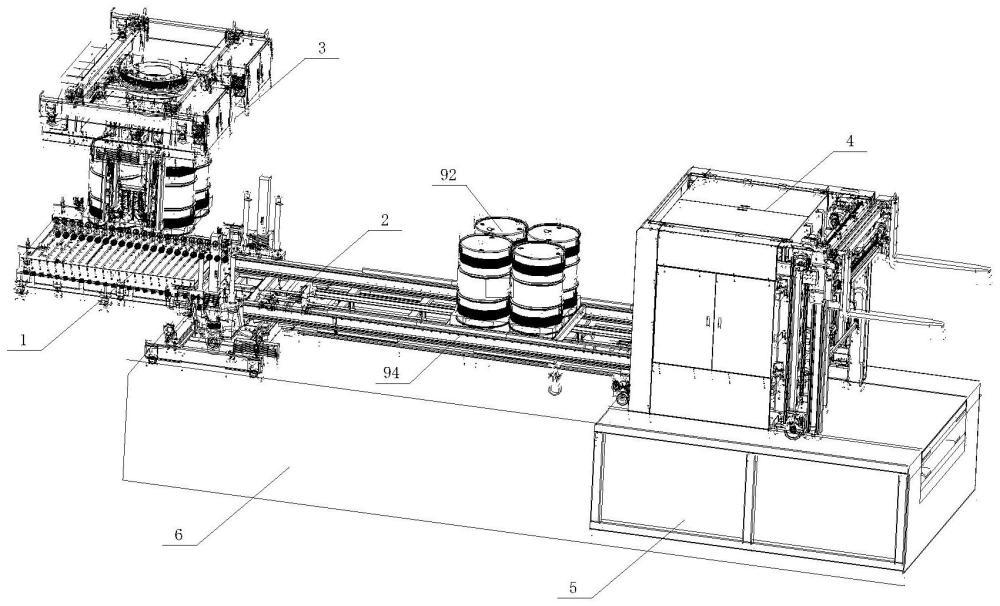
2、本发明提供门形叉车搬运系统,包括轨道移动小车(2)、门形叉车(4)和升降台(5),轨道移动小车(2)可移动地安装在地轨(61)上,地轨(61)固定安装在基台(6)上,升降台(5)位于基台(6)的前方,升降台(5)能够升降,以抬高轨道移动小车(2)前端的行走机构。
3、轨道移动小车(2),包括:
4、移动轨(21)和平板小车(22),移动轨(21)能够沿着地轨移动,平板小车(22)能够在移动轨(21)上做往复运动;
5、行走机构和辅助调节机构(24),行走机构支撑在移动轨(21)的前端下部,辅助调节机构(24)支撑在移动轨(21)的后端,并且通过行走轮(2411)与地轨(61)滚动连接。
6、行走机构为转向驱动轮机构、履带轮或引导万向轮(23),引导万向轮(23)采用两个或四个。
7、轨道移动小车(2)的底部还设有多个第一距离传感器(25),用以检测移动轨(21)与车厢底面之间的距离,并且当位于前方的第一距离传感器与位于后方的第一距离传感器的数值超过预设值,则控制辅助调节机构(24)对移动轨的后端高度进行调节,移动轨与车厢底面平行。
8、轨道移动小车(2)的前端两侧还分别设有一个或多个第二距离传感器(26),用以检测轨道移动小车(2)的前端两侧与车厢的侧板之间的距离,当两个第二距离传感器检测到的数据不等时,控制引导万向轮(23)滚动以调整轨道移动小车(2)的前端在车厢中的位置居中。
9、移动轨(21)包括内轨(211)、外轨(212)和附加轨(213),内轨(211)位于移动轨(21)的内侧面,形成轨道槽;外轨(212)位于移动轨(21)的外侧面,也形成轨道槽;附加轨(213)位于顶部。内轨(211)用于与平板小车(22)的车轮滚动连接,外轨(212)用于与门形框架(41)内侧的滚轮滚动连接,附加轨(213)用于与限位引导轮(4112)滚动连接。
10、平板小车(22)包括车体(221)、牵引带(222)、转轮(223),车体(221)通过滚轮滚动连接在移动轨(21)上,转轮(223)具有两组,设置在移动轨(21)的两端,牵引带(222)搭接在两个转轮(223)之间,并且牵引带(222)与车体(221)连接以牵引车体(221)沿着移动轨(21)移动。
11、辅助调节机构(24)包括移动底座(241)、横向滑座(242)、水平转向座(243)、摆座(244),移动底座(241)能够沿着地轨移动,横向滑座(242)能够沿着移动底座(241)横向移动,水平转向座(243)转动地连接在横向滑座(242)上,摆座(244)具有两个,可转动地连接在水平转向座(243)的两端,并能够在竖直面上摆动,两个摆座(244)支撑在移动轨(21)的下部。
12、摆座(244)上设有升降导轨(2441)、升降驱动机构(2442)、升降驱动电机(2443)、升降连接块(2444)和底座(2445),升降导轨(2441)为双侧布置,升降连接块(2444)能够沿着升降导轨(2441)上下移动,并且升降连接块(2444)支撑在移动轨(21)的下部;升降驱动机构(2442)由升降驱动电机(2443)驱动进而带动升降连接块(2444)升降;升降导轨(2441)竖直固定在底座(2445)上。
13、还包括调节气缸(2412),连接移动底座(241)和横向滑座(242)之间,以控制横向滑座(242)在移动底座(241)上的位置。
14、所述引导万向轮(23)包括轮体(231)、支架(232)、轮驱动电机(233)、连接法兰(234)、转向齿轮(235)、转向驱动齿轮(236)和转向驱动电机(237),轮体(231)转动安装在支架(232)中,轮驱动电机(233)固定连接在支架的侧方,并驱动轮体(231)转动;连接法兰(234)固定连接在支架(232)的顶部,连接法兰(234)转动地连接在转向齿轮(235)中,并且连接法兰(234)的顶部连接在移动轨(21)上。
15、门形叉车(4),可移动地安装在移动轨(21)上,包括门形框架(41)、竖轨组件(42)、横轨组件(43)、横移叉齿组件(44)、第二摄像头(45)和驱动组件(46),其中:
16、门形框架(41)为门形结构,可移动地安装在移动轨(21)上,且移动轨(21)从门形框架(41)内穿过;
17、竖轨组件(42)具有两个,竖直安装在门形框架(41)的前端两侧;
18、横轨组件(43)滑动连接在两个竖轨组件(42)之间,以能够沿着竖轨组件(42)做升降运动,以带动其上的横移叉齿组件(44)运动;
19、横移叉齿组件(44)具有两个,并且能够各自独立沿着横轨组件(43)在水平方向运动;
20、第二摄像头(45)安装在门形框架(41)的前端;
21、驱动组件(46)设置在门形框架(41)上,以驱动门形框架(41)沿着移动轨(21)运动。
22、门形框架(41)包括两侧的方框架(411)、顶部的顶梁(413)和底部的底梁(412),底梁(412)的上方的方框架(411)内侧设有走轨轮(416),走轨轮(416)连接在移动轨(21)的外侧,底梁(412)位于移动轨(21)的下方。
23、门形框架(41)还包括限位引导轮(415),限位引导轮(415)绕过移动轨(21)的上方或下方连接到移动轨(21)的内侧面,从而避免门形框架(41)自移动轨(21)滑脱。
24、门形框架(41)的方框架(411)上还设有l形加强件(414)。
25、竖轨组件(42)包括侧轨(421)、链轮驱动电机(422)和链轮组(423),其中侧轨(421)安装在门形框架(41)的前端,链轮组(423)与侧轨(421)平行布置,链轮驱动电机(422)驱动链轮组(423)运动,链轮组(423)与横轨组件(43)连接以带动横轨组件(43)沿着侧轨(421)运动。
26、横轨组件(43)包括长形框架(431)、竖向导轮(432)、限位轨(433)、传动齿条(434)和支撑横轨(445),横向方框(431)的两端通过竖向导轮(432)连接在侧轨(421)上;限位轨(433)、传动齿条(434)和支撑横轨(435)三者平行地安装在长形框架(431)上,并且限位轨(433)位于上部,支撑横轨(435)位于下部,传动齿条(434)位于限位轨(433)和支撑横轨(435)之间。
27、每一侧的竖向导轮(432)具有两个或多个,呈上下布置。
28、每个横移叉齿组件(44)包括横移叉齿(441)、横移驱动电机(442)、限位轮(443)、传动齿轮(444)和横移滑块(445),其中横移叉齿(441)的上部通过限位轮(443)连接到限位轨(433),中部通过传动齿轮(444)与传动齿条(434)啮合传动,下部通过横移滑块(445)连接到支撑横轨(435)上;横移驱动电机(442)驱动传动齿轮(444)。
29、驱动组件(46)包括叉车驱动电机(461)和驱动轮组(462),叉车驱动电机(461)通过减速器与驱动轮组(462)传动,驱动轮组(462)通过带传动或链传动的方式驱动门形框架(41)沿着移动轨(21)运动。
30、驱动组件(46)固定连接在底梁(412)上。
31、本发明提供的门形叉车搬运系统,门形叉车能够沿着轨道移动小车移动到货车车厢内,从而将轨道移动小车输送的货物叉起并在车厢内码放。
- 还没有人留言评论。精彩留言会获得点赞!