一种防止板材掉落的机械手的制作方法
本发明涉及板材生产设备,尤其涉及一种防止板材掉落的机械手。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、但是现有技术中的用于运输板材的机械手在工作中,对于待运输的板材不能稳定地夹持,导致在运输过程中危险性高,而且完成运输后不能将板材平稳地放置在目的地。
技术实现思路
1、本发明的目的在于提出一种防止板材掉落的机械手,可以将待运输的板材稳定地夹持住,从而完成运输后再将板材平稳地放下。
2、为达此目的,本发明采用以下技术方案:
3、一种防止板材掉落的机械手,包括移动行车、移动结构和机械手主体,所述移动结构设置于所述移动行车上;
4、所述机械手主体包括支撑架、同步驱动结构、抓板结构和吸板结构,所述支撑架和所述移动结构的移动端连接,所述同步驱动结构、抓板结构和吸板结构均安装于所述支撑架;
5、所述抓板结构包括两个夹紧主体,两个所述夹紧安装于第一安装架同一侧的两端,所述夹紧主体设有夹持器和抓板件,两个所述夹紧主体的所述夹持器均与所述同步驱动结构固定连接,所述同步驱动结构用于驱动两个所述夹持器作相互远离或相互靠近的移动;
6、所述抓板件设于所述夹紧主体上,所述抓板件用于夹紧待移动的板材的侧边,所述吸板结构用于吸附待移动的板材的顶面。
7、优选的,所述抓板结构还包括气缸、气缸杆、连接头和活动杆;
8、所述抓板件包括三角型衔接板和钩爪,所述三角型衔接板的其中一端与所述钩爪一体成型;
9、所述气缸通过固定座固定安装在所述夹紧主体的上方,所述气缸的传动端传动安装有所述气缸杆,所述气缸杆远离所述气缸的一端固定安装有所述连接头,所述连接头传动安装于所述活动杆的一端,所述活动杆的另一端传动安装于所述三角型衔接板,所述三角型衔接板还与所述夹紧主体转动连接。
10、优选的,所述钩爪的抓取面上均设有防滑垫块。
11、优选的,所述同步驱动结构包括中间安装架、气动马达、转轴、第一齿形带轮、传动轴、第二齿形带轮、第一传动带、第一传动带轮、第二传动带轮、第二传动带、辅助座和稳定座;
12、所述稳定座安装于所述中间安装架的一端,所述气动马达安装在所述稳定座的上端,所述气动马达的传动端传动安装有所述转轴,所述转轴远离所述气动马达的一端安装有所述第一齿形带轮;
13、所述第一安装架的两端分别通过辅助座转动安装所述第一传动带轮和第二传动带轮,所述第一传动带轮和所述稳定座位于所述中间安装架和第一安装架的同一端;
14、所述传动轴穿设所述稳定座的下端、辅助座、第二齿形带轮和第一传动带轮;
15、所述第二齿形带轮与所述第一齿形带轮均位于所述稳定座的同一侧,所述第一齿形带轮和所述第二齿形带轮的外轮面上活动安装有所述第一传动带;
16、所述第二传动带活动安装于所述第一传动带轮和所述第二传动带轮的外轮面,所述夹持器与所述第二传动带固定连接。
17、优选的,所述同步驱动结构还包括若干移动轮和滑动槽架;
18、所述滑动槽架贴合安装于所述第一安装架的侧面,且所述滑动槽架开设有滑动槽;
19、若干所述移动轮通过转动轴对称安装在所述夹紧主体的两侧;
20、且所述若干移动轮转动安装于所述滑动槽内。
21、优选的,所述移动结构包括滑动架、支撑腿、移动架和传动组件;
22、所述滑动架的数量为两组,两组所述滑动架并列设置,所述支撑腿安装在所述滑动架的下方,所述移动架滑动安装在所述滑动架上;
23、两组所述移动架之间垂直设有传动架,所述移动行车滑动安装在所述传动架上,所述传动组件设在所述移动行车上。
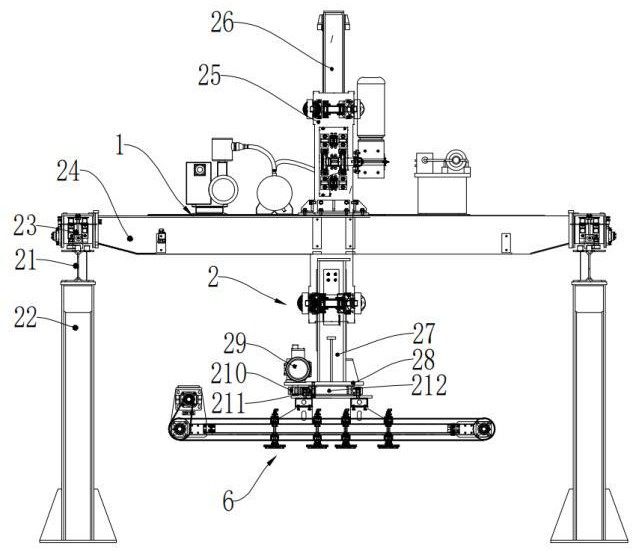
24、优选的,所述传动组件包括套筒、液压缸、移动柱、放置板、驱动电机、第一转动齿轮和第二转动齿轮;
25、所述套筒安装在所述移动行车上,所述液压缸安装在所述套筒的上方,所述移动柱滑动安装在所述套筒的内部,且所述移动柱的上方与所述液压缸的驱动端传动连接;
26、所述移动柱的下方固定连接在所述放置板的上板面的中心,所述驱动电机安装在所述放置板的上板面,所述驱动电机的驱动端安装有所述第一转动齿轮;
27、所述支撑架的上方安装有衔接柱,所述衔接柱远离所述支撑架的一端固定连接在所述放置板的下板面的中心,所述衔接柱的外柱面安装有所述第二转动齿轮,且所述第二转动齿轮与所述第一转动齿轮啮合。
28、优选的,设有多组所述抓板结构,且所述多组的抓板结构的夹持器均通过所述同步驱动结构同步驱动。
29、优选的,所述夹持器包括l型安装板、第一胶垫和第二胶垫;
30、所述l型安装板的其一安装板面安装于所述夹紧主体的侧面,所述l型安装板的另一安装板面固定安装有第一胶垫,所述第一胶垫上设有防滑槽,所述第二胶垫上设有若干固定安装孔,若干所述固定安装孔内螺纹安装有固定螺柱,所述第一胶垫和第二胶垫通过所述固定螺柱分别固定夹持在所述第二传动带的上下两侧面,所述防滑槽朝向所述第二传动带;
31、所述抓板结构的其中一个所述夹持器安装于所述第二传动带的上半部分,所述抓板结构的另一个所述夹持器安装于所述第二传动带的下半部分。
32、优选的,所述吸板结构包括第二安装架、真空泵和若干真空吸盘;
33、若干所述真空吸盘等距设置于所述第二安装架的下方,所述真空泵设置于所述第二安装架的上方,所述真空泵通过抽气管与若干所述真空吸盘连接。
34、上述技术方案中的一个技术方案具有以下有益效果:采用同步驱动结构能够根据板材的尺寸调整两个所述抓板件之间的夹持距离,能够更好地适应柔性生产线的需求,实现快速、准确地搬运不同尺寸的板材,从而提高生产效率和产品质量。同时通过抓板结构和吸板结构采用吸附与抓取配合,可对板材实现稳定抓取、平移,避免了板材的脱落问题,提升板材吸附和输送的稳定性和安全性。
技术特征:
1.一种防止板材掉落的机械手,包括移动行车(1)、移动结构(2)和机械手主体,所述移动结构(2)设置于所述移动行车(1)上,其特征在于:
2.根据权利要求1所述的一种防止板材掉落的机械手,其特征在于,所述抓板结构(5)还包括气缸(54)、气缸杆(55)、连接头(56)和活动杆(57);
3.根据权利要求2所述的一种防止板材掉落的机械手,其特征在于,所述钩爪(532)的抓取面上均设有防滑垫块(533)。
4.根据权利要求1所述的一种防止板材掉落的机械手,其特征在于,所述同步驱动结构(4)包括中间安装架(40)、气动马达(41)、转轴(42)、第一齿形带轮(43)、传动轴(44)、第二齿形带轮(45)、第一传动带(46)、第一传动带轮(47)、第二传动带轮(48)、第二传动带(49)、辅助座(413)和稳定座(410);
5.根据权利要求4所述的一种防止板材掉落的机械手,其特征在于,所述同步驱动结构(4)还包括若干移动轮(411)和滑动槽架(412);
6.根据权利要求1所述的一种防止板材掉落的机械手,其特征在于,所述移动结构(2)包括滑动架(21)、支撑腿(22)、移动架(23)和传动组件;
7.根据权利要求6所述的一种防止板材掉落的机械手,其特征在于,所述传动组件包括套筒(25)、液压缸(26)、移动柱(27)、放置板(28)、驱动电机(29)、第一转动齿轮(210)和第二转动齿轮(211);
8.根据权利要求1所述的一种防止板材掉落的机械手,其特征在于,设有多组所述抓板结构(5),且所述多组的抓板结构(5)的夹持器(52)均通过所述同步驱动结构(4)同步驱动。
9.根据权利要求4所述的一种防止板材掉落的机械手,其特征在于,所述夹持器(52)包括l型安装板(521)、第一胶垫(522)和第二胶垫(523);
10.根据权利要求1所述的一种防止板材掉落的机械手,其特征在于,所述吸板结构(6)包括第二安装架(60)、真空泵(61)和若干真空吸盘(62);
技术总结
本发明涉及板材生产设备技术领域,尤其涉及一种防止板材掉落的机械手,包括移动行车、移动结构和机械手主体,移动结构设置于移动行车上;机械手主体包括支撑架和安装在其上的同步驱动结构、抓板结构和吸板结构,支撑架和移动结构的移动端连接,抓板结构包括两个夹紧主体,夹紧主体设有夹持器和抓板件,两个夹紧主体的夹持器均与同步驱动结构固定连接,同步驱动结构用于驱动两个夹持器作相互远离或相互靠近的移动;抓板件用于夹紧待移动的板材的侧边,吸板结构用于吸附待移动的板材的顶面。本发明可以将待运输的板材稳定地夹持住,从而完成运输后再将板材平稳地放下。
技术研发人员:李忠远,闵军民,唐永林,童路洋
受保护的技术使用者:佛山慧谷科技股份有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!