一种超声波塑料模具焊接机的制作方法
[0001]
本实用新型涉及超声焊接机技术领域,具体涉及一种超声波塑料模具焊接机。
背景技术:
[0002]
超声波塑料焊接机(英文注释ultrasonic plastic welding machine)是超声波塑料焊接设备在塑料焊接领域研发设计的焊接设备,业内简称为超声波塑焊机。超声波焊接设备是熔接熟塑性塑料制品的高科技技术,各种熟塑性胶件均可使用超声波熔接处理,在焊接塑料制品时,既不要添加任何粘接剂、填料或溶剂,也不消耗大量热源,具有操作简便、焊接速度快、焊接强度高、生产效率高等优点,因此,超声波焊接技术越来越广泛地获得应用。
[0003]
但是现有的超声波塑料模具焊接机在使用过程中,焊接工作台不能提供直线尺寸和角度尺寸的参考数据,导致塑料模具的焊接精准度降低,而且,焊接机上也没有设置收纳装置,焊接有关用具取拿存放不便,容易丢失。
技术实现要素:
[0004]
(一)要解决的技术问题
[0005]
为了克服现有技术不足,现提出一种超声波塑料模具焊接机,解决了现有的超声波塑料模具焊接机在使用过程中,焊接工作台不能提供直线尺寸和角度尺寸的参考数据,导致塑料模具的焊接精准度降低,以及焊接机上也没有设置收纳装置,焊接有关用具取拿存放不便,容易丢失的问题。
[0006]
(二)技术方案
[0007]
本实用新型通过如下技术方案实现:本实用新型提出了一种超声波塑料模具焊接机,包括支撑箱体、焊接工作台和定位板,所述支撑箱体上方中部通过螺钉连接有所述焊接工作台,所述焊接工作台上方设置有所述定位板,所述定位板一端部与所述焊接工作台通过转轴转动连接,所述定位板另一端转动连接有定位螺钉,所述焊接工作台上表面上刻画有直线刻度,所述直线刻度一侧刻画有角度刻度,所述焊接工作台上靠近所述角度刻度外围成型有滑槽,所述滑槽为t型圆弧滑槽,所述滑槽内部滑动连接有滑块,所述滑块与所述定位螺钉通过螺纹连接。
[0008]
通过采用上述技术方案,可以在对塑料模具进行焊接时,可以通过转动所述定位板,然后通过所述定位螺钉将所述定位板固定紧,对塑料模具的焊接过程提供定位,所述直线刻度可以为焊接的长度提供定位数据参考,所述角度刻度可以为焊接的角度提供定位数据参考,可以提高塑料模具焊接尺寸的准确性。
[0009]
进一步的,所述支撑箱体下方四角处通过螺钉连接有支撑脚,所述支撑箱体一侧壁上设置有柜门,所述柜门与所述支撑箱体通过合页连接。
[0010]
通过采用上述技术方案,可以通过开启所述柜门,将塑料模具焊接有关的辅助用具等放置在所述支撑箱体内部,方便后续随时取拿存放,方便实用。
[0011]
进一步的,所述支撑箱体上方靠近所述焊接工作台一侧设置有立柱,所述立柱与所述支撑箱体焊接,所述立柱外围滑动连接有滑动支座,所述滑动支座以及所述立柱的个数均为二。
[0012]
通过采用上述技术方案,可以通过沿着所述立柱滑动所述滑动支座,进而对此焊接机上的所述超声焊接箱体的高度进行调节。
[0013]
进一步的,所述滑动支座一侧壁上通过螺栓连接有超声焊接箱体,所述滑动支座另一侧壁上通过螺纹连接有高度锁紧螺钉,所述超声焊接箱体一侧壁上通过螺钉连接有plc控制器。
[0014]
通过采用上述技术方案,所述高度锁紧螺钉用来将所述滑动支座锁紧在所述立柱上,实现对所述超声焊接箱体高度的固定。
[0015]
进一步的,所述超声焊接箱体内部上方通过螺钉连接有液压推杆,所述液压推杆下方通过螺钉连接有压力传感器,所述压力传感器下方通过螺钉连接有升降杆,所述升降杆下方通过螺钉连接有焊接头。
[0016]
通过采用上述技术方案,所述液压推杆动作,可以推动所述升降杆以及所述焊接头上下运动,所述压力传感器可以实时的检测所述焊接头的焊接压力,然后反馈信息给所述plc控制器,为所述液压推杆的动作提供精准的数据参考,便于实现对焊接压力的精准控制。
[0017]
进一步的,所述超声焊接箱体内底部通过螺钉连接有滑动套,所述滑动套与所述升降杆滑动连接,所述超声焊接箱体内部一侧通过螺钉连接有超声发生器,所述超声焊接箱体内部另一侧通过螺钉连接有超声换能器。
[0018]
通过采用上述技术方案,所述超声发生器和超声换能器与现有的对应的装置的结构完全相同,主要用来产生超声信号,与所述焊接头配合工作,对塑料模具进行焊接作业,可以提供两个超声波发生装置,通过所述plc控制器控制所述超声发生器和所述超声换能器轮流动作,进而提高所述超声发生器和所述超声换能器的使用寿命。
[0019]
(三)有益效果
[0020]
本实用新型相对于现有技术,具有以下有益效果:
[0021]
1、为解决现有的超声波塑料模具焊接机在使用过程中,焊接工作台不能提供直线尺寸和角度尺寸的参考数据,导致塑料模具的焊接精准度降低的问题,本实用新型可以根据需要焊接的塑料模具的需求,通过直线刻度可以为焊接的长度提供定位数据参考,角度刻度可以为焊接的角度提供定位数据参考,然后转动定位板,通过定位螺钉将定位板固定紧,对塑料模具的焊接过程提供定位,可以提高塑料模具焊接尺寸的准确性;
[0022]
2、为解决现有的超声波塑料模具焊接机上也没有设置收纳装置,焊接有关用具取拿存放不便,容易丢失的问题,本实用新型通过设置支撑箱体和柜门,可以在焊接作业时,可以将与焊接有关的辅助用具等放置在支撑箱体内部,便于随时取拿存放,防止工具丢失,实用方便。
附图说明
[0023]
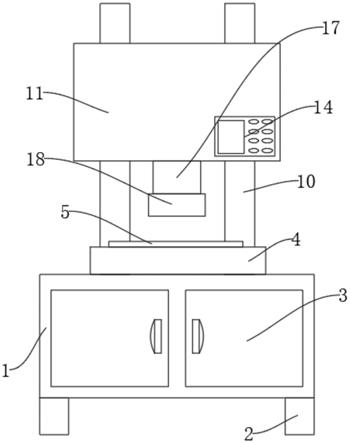
图1是本实用新型所述一种超声波塑料模具焊接机的主视图;
[0024]
图2是本实用新型所述一种超声波塑料模具焊接机中立柱、滑动支座和超声焊接
箱体的连接关系示意图;
[0025]
图3是本实用新型所述一种超声波塑料模具焊接机中焊接工作台的结构图;
[0026]
图4是本实用新型所述一种超声波塑料模具焊接机中焊接工作台、滑槽、滑块、定位螺钉和定位板的连接关系示意图;
[0027]
图5是本实用新型所述一种超声波塑料模具焊接机中超声焊接箱体的主剖视图。
[0028]
附图标记说明如下:
[0029]
1、支撑箱体;2、支撑脚;3、柜门;4、焊接工作台;5、定位板;6、定位螺钉;7、滑槽;8、角度刻度;9、直线刻度;10、立柱;11、超声焊接箱体;12、滑动支座;13、高度锁紧螺钉;14、plc控制器;15、液压推杆;16、压力传感器;17、升降杆;18、焊接头;19、滑动套;20、超声发生器;21、超声换能器;22、滑块。
具体实施方式
[0030]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0031]
如图1-图3所示,本实施例中的一种超声波塑料模具焊接机,包括支撑箱体1、焊接工作台4和定位板5,支撑箱体1上方中部通过螺钉连接有焊接工作台4,焊接工作台4上方设置有定位板5,定位板5一端部与焊接工作台4通过转轴转动连接,定位板5另一端转动连接有定位螺钉6,焊接工作台4上表面上刻画有直线刻度9,直线刻度9一侧刻画有角度刻度8,焊接工作台4上靠近角度刻度8外围成型有滑槽7,滑槽7为t型圆弧滑槽7,滑槽7内部滑动连接有滑块22,滑块22与定位螺钉6通过螺纹连接,可以在对塑料模具进行焊接时,可以通过转动定位板5,然后通过定位螺钉6将定位板5固定紧,对塑料模具的焊接过程提供定位,直线刻度9可以为焊接的长度提供定位数据参考,角度刻度8可以为焊接的角度提供定位数据参考,可以提高塑料模具焊接尺寸的准确性。
[0032]
支撑箱体1下方四角处通过螺钉连接有支撑脚2,支撑箱体1一侧壁上设置有柜门3,柜门3与支撑箱体1通过合页连接,可以通过开启柜门3,将塑料模具焊接有关的辅助用具等放置在支撑箱体1内部,方便后续随时取拿存放,方便实用。
[0033]
支撑箱体1上方靠近焊接工作台4一侧设置有立柱10,立柱10与支撑箱体1焊接,立柱10外围滑动连接有滑动支座12,滑动支座12以及立柱10的个数均为二,可以通过沿着立柱10滑动滑动支座12,进而对此焊接机上的超声焊接箱体11的高度进行调节。
[0034]
滑动支座12一侧壁上通过螺栓连接有超声焊接箱体11,滑动支座12另一侧壁上通过螺纹连接有高度锁紧螺钉13,超声焊接箱体11一侧壁上通过螺钉连接有plc控制器14,高度锁紧螺钉13用来将滑动支座12锁紧在立柱10上,实现对超声焊接箱体11高度的固定。
[0035]
超声焊接箱体11内部上方通过螺钉连接有液压推杆15,液压推杆15下方通过螺钉连接有压力传感器16,压力传感器16下方通过螺钉连接有升降杆17,升降杆17下方通过螺钉连接有焊接头18,液压推杆15动作,可以推动升降杆17以及焊接头18上下运动,压力传感器16可以实时的检测焊接头18的焊接压力,然后反馈信息给plc控制器14,为液压推杆15的动作提供精准的数据参考,便于实现对焊接压力的精准控制。
[0036]
超声焊接箱体11内底部通过螺钉连接有滑动套19,滑动套19与升降杆17滑动连
接,超声焊接箱体11内部一侧通过螺钉连接有超声发生器20,超声焊接箱体11内部另一侧通过螺钉连接有超声换能器21,超声发生器20和超声换能器21与现有的对应的装置的结构完全相同,主要用来产生超声信号,与焊接头18配合工作,对塑料模具进行焊接作业,可以提供两个超声波发生装置,通过plc控制器14控制超声发生器20和超声换能器21轮流动作,进而提高超声发生器20和超声换能器21的使用寿命。
[0037]
本实施例的具体实施过程如下:在使用此超声波塑料模具焊接机时,将其放置在合适的位置,接通电源,然后根据需要焊接的塑料模具的需求,通过直线刻度9可以为焊接的长度提供定位数据参考,角度刻度8可以为焊接的角度提供定位数据参考,然后转动定位板5,通过定位螺钉6将定位板5固定紧,对塑料模具的焊接过程提供定位,可以提高塑料模具焊接尺寸的准确性,然后通过plc控制器14调节焊接的压力,液压推杆15动作,推动升降杆17以及焊接头18上下运动,压力传感器16可以实时的检测焊接头18的焊接压力,然后反馈信息给plc控制器14,当压力超过预设值时,控制液压推杆15停止动作,为液压推杆15的动作提供精准的数据参考,便于实现对焊接压力的精准控制,超声发生器20和超声换能器21产生超声信号,与焊接头18配合工作,对塑料模具进行焊接作业,在焊接作业时,可以将与焊接有关的辅助用具等放置在支撑箱体1内部,便于随时取拿存放,防止工具丢失,实用方便。
[0038]
上面所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围,本实用新型请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1