一种汽车门洞条自动滚压设备的制作方法
[0001]
本实用新型涉及汽车制造领域,特别是涉及一种汽车门洞条自动滚压设备。
背景技术:
[0002]
车身的左侧及右侧前后共4个门洞位置需要安装汽车门洞条,即汽车门框密封条,目的是为了使汽车的乘员室成为一个密闭的空间,防止粉尘、噪音等进入车内;安装后,在后续工位通过操作者手持滚压工具对汽车门洞条进行手动滚压,以确保汽车门洞条的内部粘接胶和车身钣金黏合,但是,在实际操作过程中,由于生产工人的个体差异,滚压力的可靠性和均匀性也存在差异,因此,人工操作无法保证汽车装配线的生产效率和产品质量。
[0003]
中国专利cn104625702a公开了一种汽车门条自动滚压设备,汽车门条自动滚压设备左右两侧各设置有一套自动滚压机械单元,自动滚压机械单元包括滚压单元、前推力机械单元、动力单元和支撑单元,结构较为复杂,在实施滚压过程中会根据车型调用不同的滚轮进行滚压,前推力机械单元和动力单元的结合,应用了支杆、推板、弹簧等结构,设备实时监控滚压力,通过调整滚轮的伸缩量来调整输出的滚压力,也就是说,其在监测到滚压力变化后才对滚轮的伸缩量进行调整,并不是预先设定滚轮的运行轨迹,以控制滚轮的运行轨迹来控制滚压力,由于汽车门洞并不是规则形状,这就导致滚轮时刻在进行伸缩调整,并且在某一时刻可能调整幅度较大,此时,滚轮可能无法及时调整到位造成无法及时适应汽车门洞形状的变化,因此,无法保证恒定的滚压力,滚压效果无法保障;中国专利cn103158800a公开了一种汽车车门密封条安装设备,包括固定滑轨、平移滑轨、滑移小车和仿形架,仿形架吊装在滑移小车下面,仿形架外廓形状与车门框匹配,在仿形架外侧沿周向设置压紧机构,也就是说,其采用仿形架的方式对汽车车门密封条进行安装,不同的位置采用了不同的压紧机构,每个压紧结构的施力又无法保证完全相同,因此,其也无法保证整体受力均匀,也就无法保障良好的安装效果。
技术实现要素:
[0004]
本实用新型的目的是提供一种汽车门洞条自动滚压设备,以解决上述现有技术存在的问题,使汽车门洞条的各个位置在滚压过程中均受到恒定的滚压力,从而保障良好的滚压效果。
[0005]
为实现上述目的,本实用新型提供了如下方案:
[0006]
本实用新型提供一种汽车门洞条自动滚压设备,包括控制柜、与所述控制柜电连接的机器人控制器、设置在车辆流水线上的自动滚压工位以及设置在所述自动滚压工位两侧的自动滚压单元,所述自动滚压单元包括六轴机器人以及与所述六轴机器人连接的滚压机构;所述机器人控制器根据汽车门洞的形状预设所述六轴机器人的运行轨迹,并能够控制所述六轴机器人,使其带动所述滚压机构按照预设的运行轨迹对汽车门洞条进行滚压,且在滚压过程中始终保持恒定的滚压力。
[0007]
优选地,所述滚压力为80n
±
10%。
[0008]
优选地,所述六轴机器人通过法兰连接所述滚压机构,所述滚压机构包括安装支架以及连接在所述安装支架上的抱箍,所述抱箍安装有滚压工具。
[0009]
优选地,所述滚压工具进入滚压汽车门洞条时保持与前进方向的夹角在70
°
~75
°
之间,运行时保持与前进方向的夹角在80
°
,完成一周滚压后,所述滚压工具向前进方向后方仰起10
°
~15
°
退出汽车门洞条。
[0010]
优选地,所述安装支架上还设置有视觉引导设备,所述视觉引导设备用于辨识物体,确定位置,并将获得的物体和位置信息传递到所述机器人控制器,使得所述机器人控制器实时调整所述滚压工具的位置和角度。
[0011]
优选地,所述自动滚压工位上设置有车型识别rfid系统,所述车型识别rfid系统能够识别车型信息,并将所述车型信息传递到所述机器人控制器,使得所述机器人控制器选择相应的滚压程序来控制所述滚压工具的运行轨迹。
[0012]
优选地,所述滚压工位设置在设备危险区内,所述设备危险区设置有安全门闩,所述安全门闩打开的安全信号传递到所述控制柜,使得所述控制柜切断所有能源。
[0013]
优选地,还包括现场分布式i/ok箱,所述安全信号传递到所述现场分布式i/ok箱,所述现场分布式i/ok箱将所述安全信号通过profinet网络发送到所述控制柜。
[0014]
本实用新型相对于现有技术取得了以下技术效果:
[0015]
(1)本实用新型采用了六轴机器人安装滚压工具的方式,在控制系统的作用下,使得滚压工具按照预定轨迹对汽车门洞条进行滚压,能够保证汽车门洞条在滚压过程中受力均匀,避免了由于受力不均导致的汽车门洞条局部翘曲、脱离汽车门洞的情况,保障了良好的滚压效果;
[0016]
(2)本实用新型代替了人工操作,能够显著的降低人工成本,很大程度上节约了人员开销,并且,保持了滚压过程中的恒定的稳压力、特定的滚压角度,从而保证了滚压质量,提高了滚压的合格率;
[0017]
(3)本实用新型设置有车型识别rfid系统,在同一流水线中实施多个车型并线生产时,能够精确无误的分辨出滚压工位的车型,然后根据车型选择预设的相关滚压程序,从而能够保证滚压质量,提高识别和滚压效率;
[0018]
(4)本实用新型设置有视觉引导设备,与机器人控制器相互协作,能够实时控制机器人的运行轨迹,实时调整滚压工具的位置与角度,避免出现轨迹偏差,以保证滚压力的恒定;
[0019]
(5)本实用新型设置有安全门闩,一旦出现设备故障或者人员需要进入设备危险区时,能够直接或间接操作安全门闩使其发出安全信号,进而提供给控制柜,使其切断能源,保证安全。
附图说明
[0020]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0021]
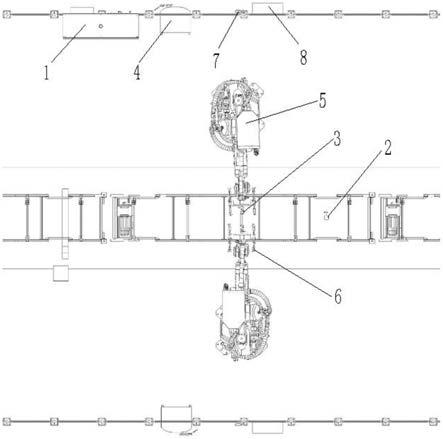
图1为汽车门洞条自动滚压设备的布局图;
[0022]
图2为六轴机器人、滚压工具以及车身的装配关系示意图;
[0023]
图3为控制系统原理图;
[0024]
图4为视觉引导设备与滚压机构的装配关系示意图;
[0025]
其中,1、控制柜;2、车型识别rfid系统;3、视觉引导设备;4、机器人控制器;5、六轴机器人;6、滚压机构;61、安装支架;62、滚压工具;63、抱箍;7、安全门闩;8、现场分布式i/ok箱;9、车身。
具体实施方式
[0026]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0027]
本实用新型的目的是提供一种汽车门洞条自动滚压设备,以解决现有技术存在的问题,使汽车门洞条的各个位置在滚压过程中均受到恒定的滚压力,从而保障良好的滚压效果。
[0028]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
[0029]
如图1所示,本实用新型提供一种汽车门洞条自动滚压设备,包括控制柜1、与控制柜1电连接的机器人控制器4、设置在车辆流水线上的自动滚压工位以及设置在自动滚压工位两侧的自动滚压单元,其中,机器人控制器4带有刹车型脚轮,通过抱紧刹车的方式固定,并且摆放在安全围栏以外;需要注意的是,自动滚压工位是相对而言的,说明在此工位进行滚压操作,在该工位设置有行程开关或者位置传感器等装置,能够使得设备识别车身9是否到达的信息,为后续是否调用滚压程序做准备;自动滚压单元包括六轴机器人5以及与六轴机器人5连接的滚压机构6,滚压机构6安装有对汽车门洞条进行滚压的滚压工具62;在安装六轴机器人5时,通过化学螺栓将其底座与混凝土地面连接;机器人控制器4根据汽车门洞的形状预设有至少一种六轴机器人5的运行轨迹,并能够控制六轴机器人5,使其带动滚压机构6按照预设的运行轨迹对汽车门洞条进行滚压,其中,对于不同的车身9,还可以设置车身9的识别系统以进行筛分,如车身9贴有条码或二维码便于识别或者直接采用影像方式直接识别车身9,在滚压过程中设定的滚压程序要求始终保持滚压机构6能够施加给汽车门洞条恒定的滚压力,以避免由于受力不均导致的汽车门洞条局部翘曲、脱离汽车门洞的情况,保障良好的滚压效果。
[0030]
如图2所示,六轴机器人5通过法兰连接滚压机构6,如图4所示滚压机构6包括安装支架61以及连接在安装支架61上的抱箍63,安装支架61上设置有法兰,法兰与六轴机器人5上的法兰通过m12螺栓进行固定连接,需要说明的是,安装支架61可以对称设置两个安装滚压工具62的安装位置,每个安装位置均设置有抱箍63,抱箍63将滚压工具62卡紧安装在安装支架61上,两个滚压工具62前后顺序实施对汽车门洞条的滚压操作,能够使得在前的滚压工具62滚压时,在后的滚压工具62同步实施滚压,从而进一步的保证滚压效果。
[0031]
在滚压程序中要求设定的滚压力为80n
±
10%,滚压工具62进入滚压汽车门洞条时保持与前进方向的夹角在70
°
~75
°
之间,运行时保持与前进方向的夹角在80
°
,完成一周
滚压后,滚压工具62向前进方向后方仰起10
°
~15
°
退出汽车门洞条。
[0032]
如图1、图4所示,安装支架61上通过四个m5螺栓连接有视觉引导设备3,如图3所示,视觉引导设备3用于辨识物体,确定位置,并将获得的物体和位置信息传递到机器人控制器4,使得机器人控制器4实时调整滚压工具62的位置和角度。本实用新型视觉引导设备3选用的是cognex公司的patmax物体定位专用视觉传感器;一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统;从功能上来看,典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分;机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成;机器人视觉通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。
[0033]
如图1所示,自动滚压工位上(本实用新型可以采用滚床)设置有车型识别rfid系统2,能够与车身9上安装的rfid电子标签位置进行对应;如图3所示,车型识别rfid系统2能够识别车型信息,并将车型信息传递到机器人控制器4,使得机器人控制器4选择相应的滚压程序来控制滚压工具62的运行轨迹。车型识别rfid系统2包括有rfid读头和rfid电子标签,无线射频识别技术(radio frequency identification,简称:rfid)是一种非接触式的自动识别技术,其基本原理是利用射频信号和空间耦合(电感或电磁耦合)或雷达反射的传输特性,实现对被识别物体的自动识别。rfid读头通过天线与rfid电子标签进行无线通信,可以实现对标签识别码和内存数据的读出或写入操作。rfid电子标签安装在车身9滑橇上,当rfid电子标签贴近rfid读头时,开始读取rfid电子标签内的信息,读到信息后通过控制模块将信号传递到plc,进行下一步指令。
[0034]
如图1所示,在汽车门洞条自动滚压设备所在的区域划分出设备危险区,将滚压工位设置在设备危险区内,设备危险区设置有安全门闩7,安全门闩7通过螺栓安装在围栏的门上;如图3所示,安全门闩7打开的安全信号传递到现场分布式i/ok箱8,现场分布式i/ok箱8分别放置在安全门闩7旁边,通过膨胀螺栓与地面连接固定,现场分布式i/ok箱8将安全信号通过profinet网络发送到控制柜1,控制柜1切断所有能源,此时,设备处在停滞状态,人员能够安全的进入到设备危险区内。需要说明的是,安全门闩7中的门闩结构为现有技术,不同的是,安全门闩7的打开动作会触发安全信号,安全门闩7可以连接控制装置,在得到控制信号后自动打开,也可以人工直接操作将其打开;当然,这只是为防止人员进入设备危险区采取的其中一种安全措施,还可以设置其他的安全模块,如设备突然出现故障时,利用安全模块将安全信号传递到控制柜1来切断能源,此时安全模块的内部设计为两个通道,两个集成处理器互相监视,自动测试i/o电路,并在发生故障时copy将f模块设置为安全状态;f-cpu使用profisafe的安全相关总线规约与故障安全模块进行通信;故障安全电源模块用于为电位组提供负载电压,并可安全地切断标准输出模块的负载电压;故障安全数字量输入模块记录安全相关传感器的信号状态,并将相应的安全消息帧发送到f-cpu;故障安全数字量输出模块适用于关闭过程,并可对执行器之前的电路进行短路和交叉电路保护。另外,需要说明的是,现场分布式i/ok箱8,也可以叫做现场接线箱,k箱这个名词应用在大众vass电气标准中,在eplan电气画图时,vass标准要求现场接线箱内部安装安全模块,这样集成的接线箱在电路图中的电气标号命名为k1/k2,也就是说,现场分布式i/ok箱8内设置有安全模块。
[0035]
本实用新型汽车门洞条自动滚压设备的工作过程如下:
[0036]
如图3所示,控制柜1接收到车身9到位的信号,并控制流水线(本实用新型可以采用滚床)停止到指定位置即滚压工位处,同时将信息通过profinet网络传送到控制柜1;控制柜1通过profinet网络触发车型识别rfid系统2读取车型信息,之后通过profinet网络将所读取到的车型信息传送到控制柜1;控制柜1将触发信号通过光纤传送到机器人控制器4,机器人控制器4的示教程序启动通过动力电缆驱动六轴机器人5手臂移动到车身9门洞指定位置;机器人控制器4到位信号通过信号电缆触发视觉引导设备3启动,视觉引导设备3将实时拍摄的画面传递到系统中,系统通过运算后将坐标位置传递到机器人控制器4,机器人控制器4驱动六轴机器人5带动滚压机构6按照机器人控制器4示教程序轨迹移动;当视觉引导设备3检测到六轴机器人5运行轨迹出现偏差时,会立即将偏差数据传递到机器人控制器4,机器人控制器4重新计算移动位置并控制六轴机器人5回到示教轨迹;当设备出现故障或需要进行日常的维护保养时,人员需要进人设备危险区,这时设备就需要启动安全信号,切断所有能源,确保人身安全;人员按下请求进入按钮,打开安全门闩7,安全门闩7打开后能够触发安全信号,安全信号传递到现场分布式i/ok箱8,现场分布式i/ok箱8将信号通过profinet网络发送到控制柜1,控制柜1将所有能源切断。
[0037]
本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1