手机前壳自动旋转贴胶设备的制作方法
1.本实用新型涉及一种手机前壳贴胶设备,尤其涉及一种手机前壳自动旋转贴胶设备。
背景技术:
2.现有手机前壳贴胶多为平面贴合,没有平面贴合完后旋转贴合侧面的,只能人工贴合,人工贴合效率低,一致性差无法保证产品的一致性,无法和现有的设备联机实现在线贴合侧面的胶。
技术实现要素:
3.本实用新型的目的是提供一种手机前壳自动旋转贴胶设备。
4.本实用新型的目的是通过以下技术方案实现的:
5.本实用新型的手机前壳自动旋转贴胶设备,包括机架1、搬运机构、上料机构、控制单元、等待工位8、定位工位5、旋转机构;
6.所述机架1作为设备主支撑连接在平台2上;
7.所述搬运机构安装在平台2的上方,并处于上台机与所述等待工位8和定位工位5之间;
8.所述等待工位8和定位工位5分别设有仿型加工治具,所述等待工位8为产品的暂存位,连接在所述平台2上;
9.所述定位工位5为产品旋转前的定位固定位,连接在旋转机构上,所述旋转机构的另一端连接在机架平台2上,且所述旋转机构设置在所述平台2的上方。
10.由上述本实用新型提供的技术方案可以看出,本实用新型实施例提供的手机前壳自动旋转贴胶设备,能实现手机前壳侧面的胶在线联机贴合,取代人工贴合,大大降低的人工成本,提高了生产效率,保证了产品品质的一致性。
附图说明
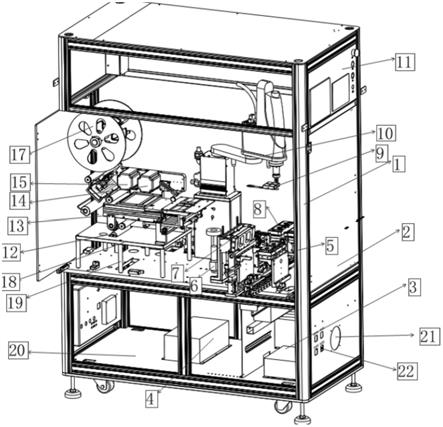
11.图1为本实用新型实施例提供的手机前壳自动旋转贴胶设备立体结构示意图。
12.图2为本实用新型实施例手机前壳自动旋转贴胶设备的机架结构示意图。
13.图3为本实用新型实施例手机前壳自动旋转贴胶设备的上料机构结构示意图。
14.图4为本实用新型实施例手机前壳自动旋转贴胶设备的搬运机构结构示意图。
15.图5为本实用新型实施例手机前壳自动旋转贴胶设备的等待工位、定位工位、机器人控制器、旋转机构示意图。
16.图6为本实用新型实施例手机前壳自动旋转贴胶设备的旋转机构原理图。
17.图中:
18.1、机架;2、平台;3、电脑;4、机器人控制器;5、定位工位;6、相机;7、定位治具;8、等待位;9、吸头;10、机器人本体;11、控制面板;12、牵引;13、挡料片;14、上料电机;15、剥离电
机;17、上料盘;18、上料机平台;19、上料机支架;21、风扇;22、负压表;24、搬运吸盘;25、上顶气缸;26、拖链;27、搬运电机;28、搬运平台;
[0019]1‑
1、保护门;1
‑
2、后门感应开关;1
‑
3、搬运轮;1
‑
4、地脚;1
‑
5、下平台;1
‑
6、电气安装板;1
‑
7、按键盒;1
‑
8、风扇安装孔;
[0020]2‑
1、光纤支架;2
‑
2、收料轴;2
‑
3、真空板;2
‑
4、导向轴;
[0021]
11
‑
1、显示器;11
‑
2、触摸屏;
[0022]7‑
1、旋转气缸;7
‑
2、定位支架。
具体实施方式
[0023]
下面将对本实用新型实施例作进一步地详细描述。本实用新型实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0024]
本实用新型的手机前壳自动旋转贴胶设备,其较佳的具体实施方式是:
[0025]
包括机架1、搬运机构、上料机构、控制单元、等待工位8、定位工位5、旋转机构;
[0026]
所述机架1作为设备主支撑连接在平台2上;
[0027]
所述搬运机构安装在平台2的上方,并处于上台机与所述等待工位8和定位工位5之间;
[0028]
所述等待工位8和定位工位5分别设有仿型加工治具,所述等待工位8为产品的暂存位,连接在所述平台2上;
[0029]
所述定位工位5为产品旋转前的定位固定位,连接在旋转机构上,所述旋转机构的另一端连接在机架平台2上,且所述旋转机构设置在所述平台2的上方。
[0030]
所述控制单元安装在所述平台2下方的控制箱中,所述控制单元包括机器人控制器4和电脑3。
[0031]
所述搬运机构包括搬运电机27、搬运平台28、上顶气缸25和搬运吸盘24,所述搬运电机27安装在机架所述平台2下方,所述搬运平台28安装在所述平台2上方,所述上顶气缸25安装在搬运平台28上方,所述搬运吸盘24安装在所述上顶气缸25上方。
[0032]
所述上料机构包括上料电机14、剥离电机15、上料盘17、牵引12,所述上料电机14安装在所述平台2上方,所述上料电机14和剥离电机15连接在上料机构的立板上。
[0033]
机器人包括吸头9、机器人本体10,所述吸头9连接在机器人本体上10,机器人本体10连接于所述平台2上。
[0034]
本实用新型的手机前壳自动旋转贴胶设备,机架1作为手机前壳自动旋转贴胶设备的主支撑,所述搬运结构(图4)从上道工序把料取到等待工位8,放到等待工位8做暂存,再从等待工位取料放到定位工位5,等待工位8为仿型加工,所述定位工位5为仿型加工做定位,之后定位工位真空吸附固定住产品,所述旋转机构旋转(图6),所述上料机构(图3),人工把辅料上到上料机,上料机实现上料和辅料剥离,所述机器人控制器从上料机取下辅料贴合到旋转机构的产品上,贴合完成后旋转机构返回,下一道工序过来取料。本实用新型能实现线体贴合也能单机贴合的全自动,设备效率高,贴合的产品不起泡,贴合效果好,保证产品的品质一致性。
[0035]
手机前壳自动旋转贴胶设备主要工作方式为:
[0036]
人工把辅料上到上料机的上料盘上17,上料机实现自动牵引、自动剥离、搬运机构
实现从上台设备把壳体自动搬运到等待位8,再从等待位8自动搬到定位工位5,定位完成后真空吸附定位旋转机构旋转,控制机器人控制器从上料机取料,取料完成贴合到前壳的壳体上,贴合完后旋转机构旋转返回,此手机前壳自动侧贴设备,效率高,一致性好,工作稳定,可与贴胶线体自由联机。
[0037]
该设备能实现手机前壳侧面的胶在线联机贴合,取代人工贴合,大大降低的人工成本,提高了生产效率,保证了产品品质的一致性。
[0038]
具体实施例:
[0039]
如图1至图6所示,一种手机前壳自动旋转贴胶设备,所述搬运机构包括搬运电机27、搬运平台28、上顶气缸25和搬运吸盘24,所述搬运电机安装在机架平台2下方,所述搬运平台安装在机架平台2上方,所述上顶气缸25安装在搬运平台2上方,所述搬运吸盘24安装在上顶气缸25上方,搬运机构(图4)用于从不同工站移动搬运壳体。
[0040]
于本实用新型的一种实施方式中,所述上料机构(图3)包含,上料电机14、剥离电机15、上料盘17、牵引12,所述上料机构安装在机架平台2上方,所述上料电机14和剥离电机15连接在上料机构的立板上,上料电机14驱动牵引使料前行,料前行一个料的间距后停止,剥离电机15驱动剥离,上料机构的作用是将料和料的底带分离。
[0041]
于本实用新型的一种实施方式中,所述机器人控制器包含,吸头9、机器人本体10,所述吸头9接在机器人本体上,机器人本体连接设备的机架平台2上,机器人控制器4的作用是将料取到贴合到壳体上。
[0042]
于本实用新型的一种实施方式中,所述定位工位5包含:定位工位5治具加工为仿型加工连接在旋转机构上,旋转机构的另一端连接在机架平台2上,定位工位的作用是将壳体固定防止在旋转过程产品松动。
[0043]
本实用新型的一种实施方式中,所述旋转机构包含旋转气缸,旋转固定支架,旋转机构的作用是将壳体旋转180度。
[0044]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1