一种高强度的注塑机械手的制作方法
1.本发明属于注塑机械手领域,具体的说是一种高强度的注塑机械手。
背景技术:
2.注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到极其重要的作用。现有的注塑机械手对于大型重物的抓取较困难,不能适应高强度的工作,对于较重的部件抓取容易造成机械手的变形,先提出一种高强度的注塑机械手用以解决上述所提出的问题。
技术实现要素:
3.本发明的目的在于提供了一种高强度的注塑机械手,以解决上述背景技术中提出的问题。
4.本发明解决其技术问题所采用的技术方案是:本发明所述的一种高强度的注塑机械手,包括安装板;所述安装板的右端对称设置有滑轨,且安装板的右端与滑轨的左端活动连接,所述滑轨的外表面设置有移动块,且滑轨的外表面与移动块的内壁相接触,所述移动块的外表面设置有调整机构,且移动块的外表面与调整机构的内壁固定连接,所述调整机构的顶部设置有导力杆,且调整机构的顶部与导力杆的底部活动连接,所述导力杆的顶部设置有承力柱,且导力杆的顶部与承力柱的底部活动连接,所述承力柱的顶部设置有抓手,且承力柱的顶部与抓手的底部活动连接,所述移动块的底部设置有连接柱,且移动块的底部与连接柱的顶部固定连接,所述连接柱的底部设置有移动柱,且连接柱的底部与移动柱的顶部固定连接,所述移动柱的内部设置有滑杆,且移动柱的内壁与滑杆的外表面相接触。
5.优选地,所述移动块包括安装环,所述安装环的内部均匀设置有连接板,且安装环的内壁与连接板的两端固定连接,所述连接板的外表面均匀设置有连接柱,所述连接柱的两端与安装环的内壁活动连接。
6.优选地,所述安装板包括顶板,所述顶板的内部设置有安装块,且顶板的内壁与安装块的外表面活动连接,顶板的底部设置有底板,所述底板的顶部与顶板的底部活动连接,所述顶板的底部对称设置有卡接柱,且顶板的底部与卡接柱的顶部固定连接,所述底板的内部设置有连接螺杆,且底板的内壁与连接螺杆的两端活动连接。
7.优选地,所述调整机构包括旋转环,所述旋转环的内部均匀设置有摩擦块,且旋转环的内壁与摩擦块的顶部固定连接,所述摩擦块的底部设置有旋转块,且摩擦块的底部与旋转块的外表面相接触,所述旋转块的底部对称设置有伸缩杆,且旋转块的底部与伸缩杆的顶部固定连接,所述伸缩杆的底部设置有卡接机构,且伸缩杆的底部与卡接机构的顶部固定连接。
8.优选地,所述卡接机构的内部均匀设置有挤压弹簧,且卡接机构的内部与挤压弹簧的右端固定连接,所述挤压弹簧的左端设置有挤压柱,且挤压弹簧的左端与挤压柱的右端固定连接。
9.优选地,所述抓手包括固定筒,所述固定筒的内部设置有活动球,且固定筒的内壁与活动球的外表面相接触,所述活动球的顶部设置有连接球,且活动球的顶部与连接球的底部固定连接,所述连接球的顶部均匀设置有支手,且连接球的顶部与支手的底部活动连接,所述连接球的底部设置有限位环,且连接球的底部与限位环的顶部相接触,所述限位环的底部均匀设置有液压柱,且限位环的底部与液压柱的顶部固定连接。
10.本发明的有益效果如下:
11.1.本发明通过设置移动块和移动柱,可以大大提高该种高强度的注塑机械手的使用强度,通过设置在滑轨表面的移动块可以进行调整机构的移动,通过设置在滑杆表面设置的移动柱对两个移动块起到辅助支撑作用,使得该种高强度的注塑机械手可以快速实现移动动作,大大提高了该种高强度的注塑机械手的使用效果。
12.2.本发明通过设置调整机构,可以大大提高该种高强度的注塑机械手的使用效果,通过调整机构可以对抓手的高度和抓取角度进行调整,使得抓手可以更加便捷的抓取部件,通过设置在调整机构底部的卡接机构可以将调整机构与移动块之间的连接更加紧固,使得力在传导过程中消耗较小,大大提高了该种高强度的注塑机械手的使用强度。
13.3.本发明通过设置抓手,可以大大提高该种高强度的注塑机械手在使用过程中通过设置在抓手底部的限位环和液压柱配合使用可以限制抓手伸出的范围,且通过设置限位环和液压柱可以提高抓手的抓取强度,使得该种高强度的注塑机械手在进行抓取时不会出现因抓取部件过重而导致抓手损坏的现象出现,大大提高了该种高强度的注塑机械手的抓取能力。
附图说明
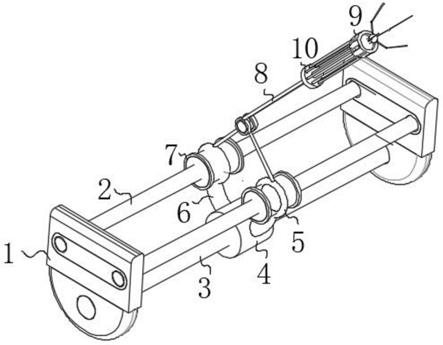
14.图1是本发明的主视图;
15.图2是本发明图移动块的结构示意图;
16.图3是本发明图安装板的结构示意图;
17.图4是本发明图安装板内部的结构示意图;
18.图5是本发明图调整机构的结构示意图;
19.图6是本发明图卡接机构的结构示意图;
20.图7是本发明图抓手的结构示意图;
21.图中:安装板1、滑轨2、滑杆3、移动柱4、调整机构5、连接柱6、移动块7、导力杆8、抓手9、承力柱10、顶板11、安装块12、底板13、卡接柱14、连接螺杆15、伸缩杆51、旋转环52、摩擦块53、旋转块54、卡接机构55、挤压柱56、挤压弹簧57、安装环71、连接板72、连接柱73、活动球91、固定筒92、限位环93、支手94、连接球95、液压柱96。
具体实施方式
22.使用图1-图7对本发明一实施方式的一种高强度的注塑机械手进行如下说明。
23.如图1-图7所示,本发明的一种高强度的注塑机械手,包括安装板1;安装板1的右
端对称设置有滑轨2,且安装板1的右端与滑轨2的左端活动连接,滑轨2的外表面设置有移动块7,且滑轨2的外表面与移动块7的内壁相接触,移动块7的外表面设置有调整机构5,且移动块7的外表面与调整机构5的内壁固定连接,调整机构5的顶部设置有导力杆8,且调整机构5的顶部与导力杆8的底部活动连接,导力杆8的顶部设置有承力柱10,且导力杆8的顶部与承力柱10的底部活动连接,承力柱10的顶部设置有抓手9,且承力柱10的顶部与抓手9的底部活动连接,移动块7的底部设置有连接柱6,且移动块7的底部与连接柱6的顶部固定连接,连接柱6的底部设置有移动柱4,且连接柱6的底部与移动柱4的顶部固定连接,移动柱4的内部设置有滑杆3,且移动柱4的内壁与滑杆3的外表面相接触,设置调整机构5的目的是为了调整抓手9的高度和抓取角度。
24.移动块7包括安装环71,安装环71的内部均匀设置有连接板72,且安装环71的内壁与连接板72的两端固定连接,连接板72的外表面均匀设置有连接柱73,连接柱73的两端与安装环71的内壁活动连接,通过设置移动块7和移动柱4,可以大大提高该种高强度的注塑机械手的使用强度,通过设置在滑轨2表面的移动块7可以进行调整机构5的移动,通过设置在滑杆3表面设置的移动柱4对两个移动块7起到辅助支撑作用,使得该种高强度的注塑机械手可以快速实现移动动作,大大提高了该种高强度的注塑机械手的使用效果。
25.安装板1包括顶板11,顶板11的内部设置有安装块12,且顶板11的内壁与安装块12的外表面活动连接,顶板11的底部设置有底板13,底板13的顶部与顶板11的底部活动连接,顶板11的底部对称设置有卡接柱14,且顶板11的底部与卡接柱14的顶部固定连接,底板13的内部设置有连接螺杆15,且底板13的内壁与连接螺杆15的两端活动连接,设置安装板1的目的是为了安装滑轨2和滑杆3。
26.调整机构5包括旋转环52,旋转环52的内部均匀设置有摩擦块53,且旋转环52的内壁与摩擦块53的顶部固定连接,摩擦块53的底部设置有旋转块54,且摩擦块53的底部与旋转块54的外表面相接触,旋转块54的底部对称设置有伸缩杆51,且旋转块54的底部与伸缩杆51的顶部固定连接,伸缩杆51的底部设置有卡接机构55,且伸缩杆51的底部与卡接机构55的顶部固定连接,通过设置调整机构5,可以大大提高该种高强度的注塑机械手的使用效果,通过调整机构5可以对抓手的高度和抓取角度进行调整,使得抓手可以更加便捷的抓取部件,通过设置在调整机构5底部的卡接机构55可以将调整机构5与移动块7之间的连接更加紧固,使得力在传导过程中消耗较小,大大提高了该种高强度的注塑机械手的使用强度。
27.卡接机构55的内部均匀设置有挤压弹簧57,且卡接机构55的内部与挤压弹簧57的右端固定连接,挤压弹簧57的左端设置有挤压柱56,且挤压弹簧57的左端与挤压柱56的右端固定连接,设置卡接机构55的目的是为了提高调整机构5和移动块7之间的连接强度。
28.抓手9包括固定筒92,固定筒92的内部设置有活动球91,且固定筒92的内壁与活动球91的外表面相接触,活动球91的顶部设置有连接球95,且活动球91的顶部与连接球95的底部固定连接,连接球95的顶部均匀设置有支手94,且连接球95的顶部与支手94的底部活动连接,连接球95的底部设置有限位环93,且连接球95的底部与限位环93的顶部相接触,限位环93的底部均匀设置有液压柱96,且限位环93的底部与液压柱96的顶部固定连接,通过设置抓手9,可以大大提高该种高强度的注塑机械手在使用过程中通过设置在抓手底部的限位环93和液压柱96配合使用可以限制抓手伸出的范围,且通过设置限位环93和液压柱96可以提高抓手的抓取强度,使得该种高强度的注塑机械手在进行抓取时不会出现因抓取部
件过重而导致抓手损坏的现象出现,大大提高了该种高强度的注塑机械手的抓取能力。
29.具体工作流程如下:
30.工作时,该种高强度的注塑机械手通过设置在滑轨2表面的移动块7对调整机构5继续固定,通过设置在移动块7内部的连接柱73与卡接机构55表面的开孔将调整机构5进行固定,通过移动块7底部设置的移动柱4对移动块4的移动起到辅助支撑的作用,通过调整机构5内部设置的卡接机构55可以实现调整机构5与移动块7的固定连接,使得调整机构5在进行调整时不会出现较多的能量损耗,大大提高了该种高强度的注塑机械手的使用效果。
31.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1