一种塑料激光焊接机的全自动工位夹持机械手臂的制作方法
1.本实用新型涉及激光焊接机辅助固定设备技术领域,尤其是一种塑料激光焊接机的全自动工位夹持机械手臂。
背景技术:
2.塑料激光焊接技术是借助激光束产生的热量使塑料接触面熔化,进而将热塑性片材、薄膜或模塑零部件粘结在一起的技术,当被粘接的塑料零部件是非常精密的材料(如电子元件)或要求无菌环境(如医疗器械和食品包装)时,塑料激光焊接技术就能派上很大用场。
3.在使用塑料激光焊接机对一些板材塑料工件进行焊接时,一般需要先将两块板材工件进行夹持固定,并使其相互对接,然后调整两块板材工件的固定角度,然后再进行焊接,而人工放置和调整角度的速度慢,效率低,不利于企业快速生产。
4.为此,有必要提出一种塑料激光焊接机的全自动工位夹持机械手臂来解决上述问题。
技术实现要素:
5.为了解决上述问题,本实用新型提出一种塑料激光焊接机的全自动工位夹持机械手臂来解决上述问题。
6.本实用新型通过以下技术方案实现的:
7.本实用新型提出一种塑料激光焊接机的全自动工位夹持机械手臂,包括两个夹持臂和放置台,两个所述夹持臂分别固定连接于所述放置台两侧并对称设置,所述夹持臂包括固定座、联动机构和夹持装置,所述固定座上设有支撑臂,所述联动机构一端与所述支撑臂固定连接,所述联动机构另一端与所述夹持装置固定连接,所述夹持装置包括支撑架、两个第一驱动装置和两个夹持组件,两个所述第一驱动装置分别固定连接于所述支撑架两侧,两个所述夹持组件分别与两个所述第一驱动装置一一对应并固定连接于所述第一驱动装置的转轴上,两个所述夹持组件分别与所述支撑架铰接,两个所述夹持组件对称设置,两个所述第一驱动装置转动能够分别带动两个所述夹持组件做开合运动。
8.进一步的,所述夹持组件包括第一连接杆、第二连接杆和开合件,所述第一连接杆一端与所述第一驱动装置的转轴固定连接,所述第一连接杆另一端与所述开合件铰接,所述第二连接杆一端与所述支撑架铰接,所述第二连接杆另一端与所述开合件铰接。
9.进一步的,所述开合件一端设有用于夹持外部工件的夹持板。
10.进一步的,所述夹持板上设有多个防滑凸起结构,多个所述防滑凸起结构依次排列。
11.进一步的,所述支撑架上设有支撑杆,所述第二连接杆一端与所述支撑杆铰接。
12.进一步的,所述联动机构包括第二驱动装置、连接盘、第三驱动装置、第三连接杆、第四驱动装置、第四连接杆、第五驱动装置和第六驱动装置,所述第二驱动装置与所述支撑
臂固定连接,所述连接盘与所述第二驱动装置的转轴固定连接,所述第三驱动装置固定连接于所述连接盘一侧,所述第三连接杆一端与所述第三驱动装置的转轴固定连接,所述第四驱动装置固定连接于所述第三连接杆另一端,所述第四连接杆一端与所述第四驱动装置的转轴固定连接,所述第四连接杆另一端与所述第五驱动装置的转轴固定连接,所述第六驱动装置与所述第五驱动装置固定连接,所述第六驱动装置的转轴与所述支撑架固定连接。
13.进一步的,所述放置台上设有用于收纳杂物的收纳槽。
14.本实用新型的有益效果:
15.本实用新型提出一种塑料激光焊接机的全自动工位夹持机械手臂,包括两个夹持臂和放置台,两个夹持臂分别固定连接于放置台两侧并对称设置,夹持臂包括固定座、联动机构和夹持装置,固定座上设有支撑臂,联动机构一端与支撑臂固定连接,联动机构另一端与夹持装置固定连接,夹持装置包括支撑架、两个第一驱动装置和两个夹持组件,两个第一驱动装置分别固定连接于支撑架两侧,两个夹持组件分别与两个第一驱动装置一一对应并固定连接于第一驱动装置的转轴上,两个夹持组件分别与支撑架铰接,两个夹持组件对称设置,两个第一驱动装置转动能够分别带动两个夹持组件做开合运动;在进行激光焊接前,两个夹持臂分别夹持两块板材工件,然后通过工作人员操作外部的控制器对两个夹持臂进行初步的编程使得其达到接合的转态,以此来确定两块板材的接合焊接角度,待焊接角度确定后,执行焊接程序则两个夹持臂能够不断地重复夹持接合的动作以配合塑料激光焊接机的焊接过程;综上所述,本塑料激光焊接机的全自动工位夹持机械手臂能够快速的夹持板材工件并确定其焊接角度,高效的配合了塑料激光焊接机的焊接过程,省去了人工成本,有利于企业高效生产。
附图说明
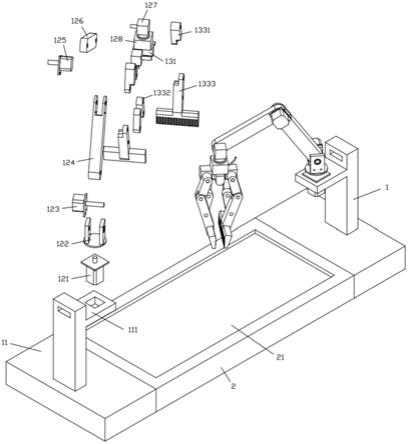
16.图1为本实用新型提出的塑料激光焊接机的全自动工位夹持机械手臂的爆炸图;
17.图2为本实用新型提出的塑料激光焊接机的全自动工位夹持机械手臂的整体示意图;
18.图3为本实用新型提出的塑料激光焊接机的全自动工位夹持机械手臂的夹持装置示意图;
19.图4为图2标号a的局部放大示意图。
具体实施方式
20.为了更加清楚、完整的说明本实用新型的技术方案,下面结合附图对本实用新型作进一步说明。
21.请参考图1-4,本实用新型提出一种塑料激光焊接机的全自动工位夹持机械手臂,包括两个夹持臂1和放置台2,两个夹持臂1分别固定连接于放置台2两侧并对称设置,夹持臂1包括固定座11、联动机构12和夹持装置13,固定座11上设有支撑臂111,联动机构12一端与支撑臂111固定连接,联动机构12另一端与夹持装置13固定连接,夹持装置13包括支撑架131、两个第一驱动装置132和两个夹持组件133,两个第一驱动装置132分别固定连接于支撑架131两侧,两个夹持组件133分别与两个第一驱动装置132一一对应并固定连接于第一
驱动装置132的转轴上,两个夹持组件133分别与支撑架131铰接,两个夹持组件133对称设置,两个第一驱动装置132转动能够分别带动两个夹持组件133做开合运动。
22.在本实施方式中:
23.夹持臂1用于夹持外部待焊接的板材工件;
24.固定座11用于为联动机构12提供一个支撑的结构;
25.支撑臂111用于为联动机构12提供一个支撑的结构,使得联动机构12能够凸出于外部;
26.联动机构12用于带动夹持装置13移动;
27.夹持装置13用于夹持待焊接的板材工件;
28.支撑架131用于为第一驱动装置132提供一个稳固的安装结构;
29.第一驱动装置132共有2个,都为步进电机,用于带动夹持组件133转动夹持外部待焊接板材工件;
30.夹持组件133用于夹持外部待焊接板材工件;
31.放置台2用于为两个夹持臂1腾出空位,使得待焊接的工件有对接的位置;
32.具体的,在夹持臂1夹持工件时,第一驱动装置132转动带动夹持组件133转动打开,然后联动机构12带动夹持组件133移动至待焊接板材工件一侧,第一驱动装置132转动带动夹持组件133转动闭合夹持住板材工件,两个夹持臂1均遵循上述夹持过程进行夹持;
33.在进行激光焊接前,两个夹持臂1分别夹持两块板材工件,然后通过工作人员操作外部的控制器对两个夹持臂1进行初步的编程使得其达到接合的转态,以此来确定两块板材的接合焊接角度,在板材接合时,联动机构13带动夹持组件133移动或转动至预设角度,待焊接角度确定后,执行焊接程序则两个夹持臂1能够不断地重复夹持接合的动作以配合塑料激光焊接机的焊接过程;
34.综上所述,本塑料激光焊接机的全自动工位夹持机械手臂能够快速的夹持板材工件并确定其焊接角度,高效的配合了塑料激光焊接机的焊接过程,省去了人工成本,有利于企业高效生产。
35.进一步的,夹持组件133包括第一连接杆1331、第二连接杆1332和开合件1333,第一连接杆1331一端与第一驱动装置132的转轴固定连接,第一连接杆1331另一端与开合件铰接,第二连接杆1332一端与支撑架131铰接,第二连接杆1332另一端与开合件1333铰接;开合件1333一端设有用于夹持外部工件的夹持板13331;夹持板13331上设有多个防滑凸起结构13332,多个防滑凸起结构13332依次排列;支撑架131上设有支撑杆1311,第二连接杆1332一端与支撑杆1311铰接。
36.在本实施方式中:
37.第一连接杆1331用于将第一驱动装置132的转动动力传递至开合件1333上;
38.第二连接杆1332用于限制开合件1333的转动角度;
39.开合件1333用于开合夹持外部待焊接的板材工件;
40.夹持板13331用于与外部待焊接板材抵接;
41.防滑凸起结构13332用于增大夹持板13331与所夹持的外部板材的固定力;
42.支撑杆1311用于为支撑架131提供一个与第二连接杆1332铰接的结构。
43.进一步的,联动机构12包括第二驱动装置121、连接盘122、第三驱动装置123、第三
连接杆124、第四驱动装置125、第四连接杆126、第五驱动装置127和第六驱动装置128,第二驱动装置121与支撑臂1固定连接,连接盘122与第二驱动装置121的转轴固定连接,第三驱动装置123固定连接于连接盘122一侧,第三连接杆124一端与第三驱动装置123的转轴固定连接,第四驱动装置125固定连接于第三连接杆124另一端,第四连接杆126一端与第四驱动装置125的转轴固定连接,第四连接杆126另一端与第五驱动装置127的转轴固定连接,第六驱动装置128与第五驱动装置127固定连接,第六驱动装置128的转轴与支撑架131固定连接。
44.在本实施方式中:
45.第二驱动装置121为步进电机,用于带动连接盘122转动;
46.连接盘122用于为第三驱动装置123提供一个支撑的结构;
47.第三驱动装置123为步进电机,用于带动第三连接杆124转动;
48.第三连接杆124用于为第四驱动装置125提供一个支撑的结构;
49.第四驱动装置125为步进电机,用于带动第四连接杆126转动;
50.第四连接杆126用于为第五驱动装置127提供一个稳固的安装结构;
51.第五驱动装置127为步进电机,用于带动第六驱动装置128转动;
52.第六驱动装置128为步进电机,用于带动夹持装置13转动;
53.进一步的,放置台2上设有用于收纳杂物的收纳槽21。
54.在本实施方式中:
55.收纳槽21用于为在板材焊接时所掉落的杂物提供一个收纳的空间。
56.当然,本实用新型还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1