制造单元、制造系统和方法
本文涉及制造单元、包括一个或多个所述制造单元的制造系统(例如试生产线)以及利用所述制造单元的制造方法。
背景技术:
1、试生产线为小型预生产线,并且通常以固定的占地面积、固定的能力和高的安装成本固定就位。
技术实现思路
1、本公开的方面涉及制造单元、包括一个或多个所述制造单元的制造系统(例如,生产线)以及利用所述一个或多个制造单元的制造方法。
2、根据第一方面,提供一种制造单元。制造单元可以为可重新配置的。例如,制造单元可以被配置为多种不同的配置。
3、有利地,制造单元以及因此包括这些单元的系统(例如,试生产线)可以为可重新配置的,使得组成生产工艺的单元的能力可以容易地改变,以改变系统的能力提供。制造单元特别有利于促进诸如用于复合材料的构造的工艺,包括自动纤维放置(“afp”)、干纤维铺放(例如,staxx、rtm)、机加工等。这些单元将在任何时候拥有给定的能力,但具有高度的通用性,能够改变制造能力以及支持机器人和数字元件等基础设施。该单元可以根据需求充当智能工作平台和自动化生产单元。
4、此外,制造单元和使用一个或多个单元构成的系统提供显著的灵活性;在高度可变的制造工艺中特别有用,在这些工艺中,供应链为零散的和/或需要弹性和灵活的供应链来响应需求。
5、制造单元可以包括基座。基座可以形成制造单元的基础。
6、基座在构造上可以为模块化的和/或可重新配置的。
7、基座可以包括多个板。
8、板中的一个或多个可以由金属或金属材料构成。在特定的实施例中,板可以由铝构成。然而,将认识到,板可以由任何合适的材料构成。例如,板中的一个或多个可以由以下一种或多种构成:金属或金属合金;木质材料;聚合材料;复合材料,诸如纤维增强材料(例如,玻璃纤维增强材料或碳纤维增强材料);陶瓷材料。
9、板可以采用若干不同的配置。
10、板中的至少两个可以具有相同或基本上相同的配置,例如,相同的长度、相同的高度、相同的厚度和/或相同的形状。在一些实施例中,所有板具有相同或基本上相同的配置。
11、替代地或附加地,板中的至少一个可以具有与板中的至少一个其它板不同的配置,例如,不同的长度、不同的高度、不同的厚度和/或不同的形状。
12、基座可以包括多个块。
13、块中的一个或多个可以由金属或金属材料构成。在特定的实施例中,块可以由铝构成。然而,将认识到,块可以由任何合适的材料构成。例如,块中的一个或多个可以由以下一种或多种构成:金属或金属合金;木质材料;聚合材料;复合材料,诸如纤维增强材料(例如,玻璃纤维增强材料或碳纤维增强材料);和陶瓷材料。
14、块可以采用若干不同的配置。
15、块中的至少两个可以具有相同或基本上相同的配置,例如,相同的长度、相同的高度、相同的厚度和/或相同的形状。在一些实施例中,所有块具有相同或基本上相同的配置。
16、替代地或附加地,块中的至少一个可以具有与块中的至少一个其它块不同的配置,例如,不同的长度、不同的高度、不同的厚度和/或不同的形状。
17、板和/或块可以通过联接装置联接在一起。
18、例如,板和/或块可以通过紧固件联接在一起。在特定的实施例中,紧固件可以采用帽螺钉的形式。紧固件可以接合板和/或块中的孔。
19、然而,将认识到,紧固件可以采用任何合适的联接装置的形式。例如,板和/或块中的至少一个可以包括或限定凸形轮廓,该凸形轮廓被配置用以接合板和/或块中的另一个的凹形轮廓。替代地或附加地,板和/或块中的至少一个可以包括或限定凹形轮廓,该凹形轮廓被配置为接合板和/或块中的另一个的凸形轮廓。
20、基座可以限定一个或多个通道。通道可以在内部贯穿整个结构,并且旨在允许服务(例如,电气、数据、液压、气动、水/空气等中的一种或多种)的路线安排。
21、基座可以采用任何合适的尺寸或形状。
22、基座可以为矩形的形状。基座可以为正方形的形状。基座可以具有1米或大约1米至2米或大约2米的范围内的宽度。基座可以具有1米或大约1米的宽度。基座可以具有2米或大约2米的宽度。基座可以具有1米或大约1米至2米或大约2米的范围内的幅度。基座可以具有1米或大约1米的幅度。基座可以具有2米或大约2米的幅度。
23、制造单元可以包括支脚。基座可以由支脚支撑在地面或其它支撑表面上。然而,将认识到,基座可以替代地直接设置在地面或地板表面上。
24、制造单元可以包括工作台。工作台可以设置在基座的顶部。在特定的实施例中,工作台可以采用具有若干个槽的t形槽工作台的形式。工作台可以固定到基座。工作台可以通过联接装置固定到基座。联接装置可以包括紧固件。在特定的实施例中,紧固件可以采用螺栓的形式。然而,将认识到,紧固件可以采用任何合适的联接装置的形式。紧固件可以接合基座中相应的孔。
25、有利地,提供t形槽工作台便于制造能力的容易安装和/或移除。
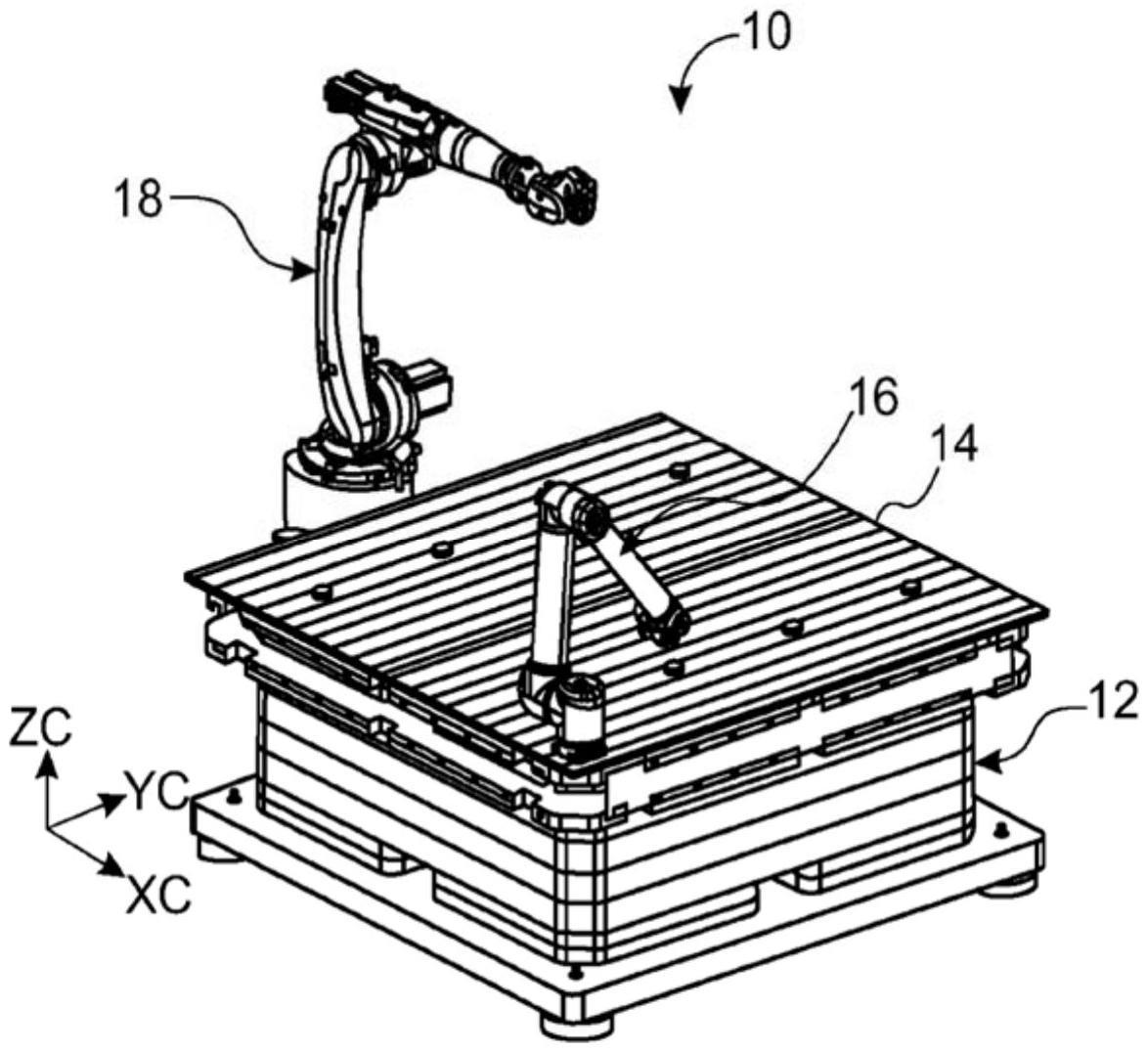
26、制造单元可以包括一个或多个机器人装置。
27、制造单元可以包括协作式机器人“协作机器人(cobot)”。协作机器人安装到基座。协作机器人可以被支撑在基座内设置的压载物上。
28、制造单元可以包括工业机器人。
29、一个或多个机器人装置中的至少一个可以包括或采用机械臂的形式。
30、协作机器人可以包括或采用机械臂的形式。协作机器人可以被配置或布置为提供拾取-放置能力和/或便于与使用者共同工作。在特定的实施例中,协作机器人可以包括或采用来自优傲机器人(universal robots)的ur10e的形式。然而,将理解,制造单元可以包括任何合适形式的协作机器人。
31、工业机器人可以包括或采用机械臂的形式。在特定的实施例中,工业机器人可以包括或采用来自kuka的kr20-1810的形式。然而,将理解,制造单元可以包括任何合适形式的工业机器人。
32、工业机器人可以被配置为接收各种不同的末端执行器。例如,但不排他地,工业机器人可以包括自动纤维放置(“afp”)末端执行器形式的末端执行器,从而工业机器人可以被配置用以执行自动纤维放置(“afp”)操作,诸如在层压复合部件的构造中使用的操作。
33、工业机器人可以安装在底座上。底座可以设置在基座旁边。然而,工业机器人可以替代地联接到基座的一部分或者形成基座的一部分,使得工业机器人可以通过基座接地。
34、制造单元可以被配置以联接到一个或多个服务,诸如电气、数据、液压、气动、水/空气等中的一种或多种。
35、制造单元可以包括整体式连接器。整体式连接器可以设置在基座内。然而,整体式连接器可以替代地设置在基座的外部。整体式连接器便于将制造单元联接到服务,诸如上面描述的电气、数据、液压、气动、水/空气等中的一种或多种。
36、制造单元或其任何单个部件或部件组可以以任何合适的方式来制造。在一些示例中,所公开的制造单元或其任何单个部件或部件组可以通过增材制造来制造。这种所描述的增材制造通常涉及其中基于部件的三维(3d)信息(例如,三维计算机模型(或设计文件))来制造部件的工艺。
37、相应地,本文中描述的示例不仅包括制造单元和相关部件,而且包括经由增材制造来制造制造单元或相关部件的方法,以及用于控制经由增材制造进行的制造单元和相关部件的制造的计算机软件、固件或硬件。所有将来提及的“产品”被理解为包括所描述的制造单元和所有相关部件。
38、产品的结构可以以设计文件的形式数字化表现。设计文件或计算机辅助设计(cad)文件为对产品形状的表面或体积配置中的一个或多个进行编码的配置文件。也就是说,设计文件表现产品的几何布置或形状。
39、设计文件可以采用任何现在已知的或以后开发的文件格式。例如,设计文件可以为立体光刻或“标准曲面细分语言”(.stl)格式,该格式被创建用于3d系统的立体光刻cad程序,或者为增材制造文件(.amf)格式,该格式为美国机械工程师协会(asme)标准,其是基于可扩展标记语言(xml)的格式,设计用于允许任何cad软件描述在任何增材制造打印机上待制造的任何三维物体的形状和成分。
40、设计文件格式的进一步示例包括autocad(.dwg)文件、blender(.blend)文件、parasolid(.x_t)文件、3d制造格式(.3mf)文件、autodesk(3ds)文件、collada(.dae)文件和wavefront(.obj)文件,尽管还存在许多其它文件格式。
41、可以使用建模(例如cad建模)软件和/或通过扫描产品表面以测量产品的表面配置来产生设计文件。
42、一旦获得,设计文件可以被转换成一组计算机可执行指令,这些指令一旦被处理器执行,就使得处理器控制增材制造设备根据设计文件中指定的几何布置来生产产品。转换可以将设计文件转换成将由增材制造设备顺序形成的切片或层。指令(也称为几何代码或“g-代码”)可以根据特定的增材制造设备进行校准,并且可以指定在制造工艺的每个阶段要形成的材料的精确位置和数量。形成可以通过沉积、通过烧结或通过任何其它形式的增材制造方法来实现。
43、代码或指令可以根据需要在不同格式之间转变、转换成一组数据信号并且发送、作为一组数据信号接收并且转换成代码、存储等。指令可以为增材制造系统的输入,并且可以来自零件设计者、知识产权(ip)提供商、设计公司、增材制造系统的操作者或所有者,或者来自其它来源。增材制造系统可以执行指令以使用本文中公开的任何技术或方法来制造产品。
44、设计文件或计算机可执行指令可以存储在(暂时性或非暂时性)计算机可读存储介质(例如,存储器、存储系统等)中,该计算机可读存储介质存储代表要生产的产品的代码和计算机可读指令。如所述的,限定产品的代码或计算机可读指令可以用于在通过增材制造系统执行代码或指令时物理地生成物体。例如,指令可以包括产品的精确限定的3d模型,并且可以从各种公知的计算机辅助设计(cad)软件系统(诸如designcad 3d max等)中的任何一种生成。替代地,部件的模型或原型可以被扫描以确定部件的三维信息。
45、相应地,通过根据计算机可执行指令控制增材制造设备,增材制造设备可以被指令以打印出产品。
46、鉴于以上,实施例包括经由增材制造的制造方法。该方法包括步骤:获得代表产品的设计文件并且指令增材制造设备根据设计文件以组装或未组装的形式制造产品。增材制造设备可以包括配置用以将设计文件自动转换成用于控制产品的制造的计算机可执行指令的处理器。在这些实施例中,一旦设计文件被输入到增材制造设备中,设计文件本身可以自动导致产品的生产。相应地,在该实施例中,设计文件本身可以被认为是导致增材制造设备制造产品的计算机可执行指令。替代地,设计文件可以通过外部计算系统被转换成指令,得到的计算机可执行指令被提供到增材制造设备。
47、根据以上,实施本主题的设计和制造可以使用数字电子电路来实现,或者在包括本说明书中公开的结构及其结构等效物的计算机软件、固件或硬件中实现,或者在它们中的一个或多个的组合中实现。例如,硬件可以包括处理器、微处理器、电子电路、电子部件、集成电路等。本公开中描述的主题的实施可以使用一个或多个计算机程序来实现,计算机程序即计算机程序指令的一个或多个模块,被编码在计算机存储介质上用于由数据处理设备执行或控制数据处理设备的操作。替代地或附加地,程序指令可以被编码在人工生成的传播信号上,例如,机器生成的电、光或电磁信号,该信号被生成以编码信息用于传输到合适的接收器设备以由数据处理设备执行。计算机存储介质可以为或被包括在计算机可读存储装置、计算机可读存储基板、随机或串行存取存储器阵列或装置或者它们中的一个或多个的组合中。此外,虽然计算机存储介质不是传播信号,但是计算机存储介质可以为编码在人工生成的传播信号中的计算机程序指令的源或目的地。计算机存储介质还可以为或被包括在一个或多个分离的物理部件或介质(例如,多个cd、磁盘或其它存储装置)中。
48、尽管增材制造技术在本文中被描述为能够通过通常在竖直方向上逐点、逐层构建物体来制造复杂物体,但是其它制造方法也是可能的,并且在本主题的范围内。例如,尽管本文中的讨论涉及添加材料以形成连续层,但是本领域的普通技术人员将理解,在本文中公开的方法和结构可以用任何增材制造技术或其它制造技术(例如,铸造、机加工、激光切割、钻孔、轧制等)来实践。
49、根据第二方面,提供包括根据第一方面的一个或多个制造单元的制造系统。
50、系统可以包括或采用生产线的形式,特别是但不排他地是试生产线。
51、系统可以包括或采用单元式制造系统的形式。
52、系统可以包括根据第一方面的单元中的一个。
53、替代地,系统可以包括多个根据第一方面的单元。
54、系统可以进一步包括下列中的一个或多个:洁净室;计量站;机加工工具;pei压机;高压釜;和rtm压机。
55、在系统包括多个单元的情况下,单元可以布置在网络中。单元可以布置成一行。
56、系统可以包括用于在单元和/或系统的其它部分之间运输部件的自动车辆。
57、根据第三方面,提供一种使用一个或多个根据第一方面的制造单元或根据第二方面的制造系统的制造方法。
58、本发明由所附权利要求限定。然而,为了本公开的目的,将理解,上面限定的或下面描述的任何特征可以被单独或组合利用。例如,上面关于以上方面中的一个描述的特征或下面关于以下详细描述的特征可以用于任何其它方面或者一起形成新的方面。
- 还没有人留言评论。精彩留言会获得点赞!