一种辅料定位取的贴辅料机的制作方法
本技术涉及手机壳贴辅料,特指一种辅料定位取的贴辅料机。
背景技术:
1、目前,手机壳的辅料贴合工序中,通常都是由工作人员手工将辅料与手机壳进行贴合完成。手工贴合存在如下缺陷:人工作业工作量大、工作效率低;人工长时间作业易疲劳、容易出错、容易出现漏贴;人工贴合精度不够精准、造成不良品比较多、成本高。
2、鉴于上述问题,有必要对现有技术进行改进。
技术实现思路
1、针对上述问题,本实用新型提供了一种辅料定位取的贴辅料机,有效解决现有技术的缺陷与不足。
2、为了实现上述目的,本实用新型应用的技术方案如下:
3、一种辅料定位取的贴辅料机,包括机壳,机壳靠近流水线的一侧设有用于对手机壳进行导向定位的导向机构,导向机构位于流水线上,机壳靠近导向机构的一侧设有上料机构,机壳远离导向机构的一侧设有下料机构,上料机构与下料机构之间设有拉线机构,机壳远离流水线的一侧设有对辅料进行剥料的剥料机构,机壳上设有用于对手机壳进行拍照的手机壳拍照相机、用于对已剥辅料进行拍照的辅料拍照相机、用于吸附已剥辅料并将辅料贴合至手机壳的取贴料机械手、用于对机械手上辅料进行纠偏的纠偏相机、以及用于采集信号及控制贴辅料机工作的控制系统。
4、根据上述方案,所述导向机构上设有第一来料感应器,所述第一来料感应器与控制系统信号连接。
5、根据上述方案,所述上料机构包括上料滑轨与上料机械手,上料机械手滑动设于上料滑轨上,上料机械手用于将导向机构导向定位的手机壳进行移动至拉线机构上,下料机构包括下料滑轨与下料机械手,下料机械手滑动设于下料滑轨上,下料机械手用于将拉线机构上已贴辅料的手机壳移动至流水线上,上料机械手与下料机械手分别与控制系统信号连接。
6、根据上述方案,所述拉线机构包括上料拉线、定料拉线以及下料拉线,上料拉线与上料机械手对应设置,下料拉线与下料机械手对应设置,定料拉线位于上料拉线与下料拉线之间,定料拉线上设有用于将手机壳进行夹紧定位的夹紧机构,夹紧机构上设有第二来料感应器,第二来料感应器与控制系统信号连接。
7、根据上述方案,所述剥料机构包括第一辅料盘、第二辅料盘、第一辅料剥料板、第二辅料剥料板、第一剥料电机以及第二剥料电机,第一辅料盘用于放置第一辅料带,第一剥料电机驱动第一辅料剥料板对第一辅料带上的辅料进行剥离,第二辅料盘用于放置第二辅料带,第二剥料电机驱动第二辅料剥料板对第二辅料带上的辅料进行剥离,第一剥料电机与第二剥料电机分别与控制系统信号连接。
8、根据上述方案,所述辅料拍照相机包括第一辅料拍照相机与第二辅料拍照相机,第一辅料拍照相机用于对置于剥料机构的第一辅料剥料板上的辅料进行拍照,第二辅料拍照相机用于对置于剥料机构的第二辅料剥料板上的辅料进行拍照,第一辅料拍照相机与第二辅料拍照相机分别与控制系统信号连接。
9、根据上述方案,所述取贴料机械手通过驱动模组驱动移动对置于剥料机构的第一辅料剥料板上的辅料及对置于剥料机构的第二辅料剥料板上的辅料进行吸附,并移动至拉线机构的定料拉线位置对手机壳进行贴辅料,驱动模组包括z轴模组、y轴模组以及x轴模组,取贴料机械手安装于z轴模组上,并通过z轴模组驱动升降,z轴模组滑动安装于y轴模组上,y轴模组滑动安装于x轴模组上,取贴料机械手与控制系统信号连接。
10、根据上述方案,所述取贴料机械手上设有用于吸附剥料机构的第一辅料剥料板上的辅料的第一吸嘴以及用于吸附剥料机构的第二辅料剥料板上的辅料的第二吸嘴。
11、根据上述方案,所述纠偏相机包括第一辅料纠偏相机与第二辅料纠偏相机,第一辅料纠偏相机用于对取贴料机械手上第一吸嘴上的辅料进行纠偏,第二辅料纠偏相机用于对取贴料机械手上第二吸嘴上的辅料进行纠偏。
12、根据上述方案,所述机壳上罩设有机罩,机壳的底部设有万向滚轮与定位支撑脚。
13、本实用新型有益效果:
14、本实用新型采用这样的结构设置,通过机械代替人工作业,其工作效率高,且不易出错,贴合更精准,提高良品率。其工作原理:待贴辅料手机壳在流水线上从上工序流至被导向机构导向定位,上料机构将贴辅料手机壳移载至拉线机构上,并通过手机壳拍照相机对手机壳进行拍照,将手机壳所在坐标反馈至控制系统,剥料机构对辅料进行剥料,并通过辅料拍照相机对已剥离的辅料进行拍照,将辅料所在坐标反馈至控制系统,取贴料机械手根据辅料坐标对辅料进行吸附,并通过纠偏相机对辅料进行纠偏,使得贴辅料时更精准,防止位置贴偏,再根据手机壳坐标移动至待贴辅料位进行贴辅料,最后再通过下料机构将已贴辅料的手机壳下料。需要说明的是,贴辅料完成后,手机壳拍照相机再次对手机壳进行拍照复检,检测贴辅料是否ok,如ok即为良品可放行下料,如不ok即为不良品,通过人工干预,将不良品手动取出。
技术特征:
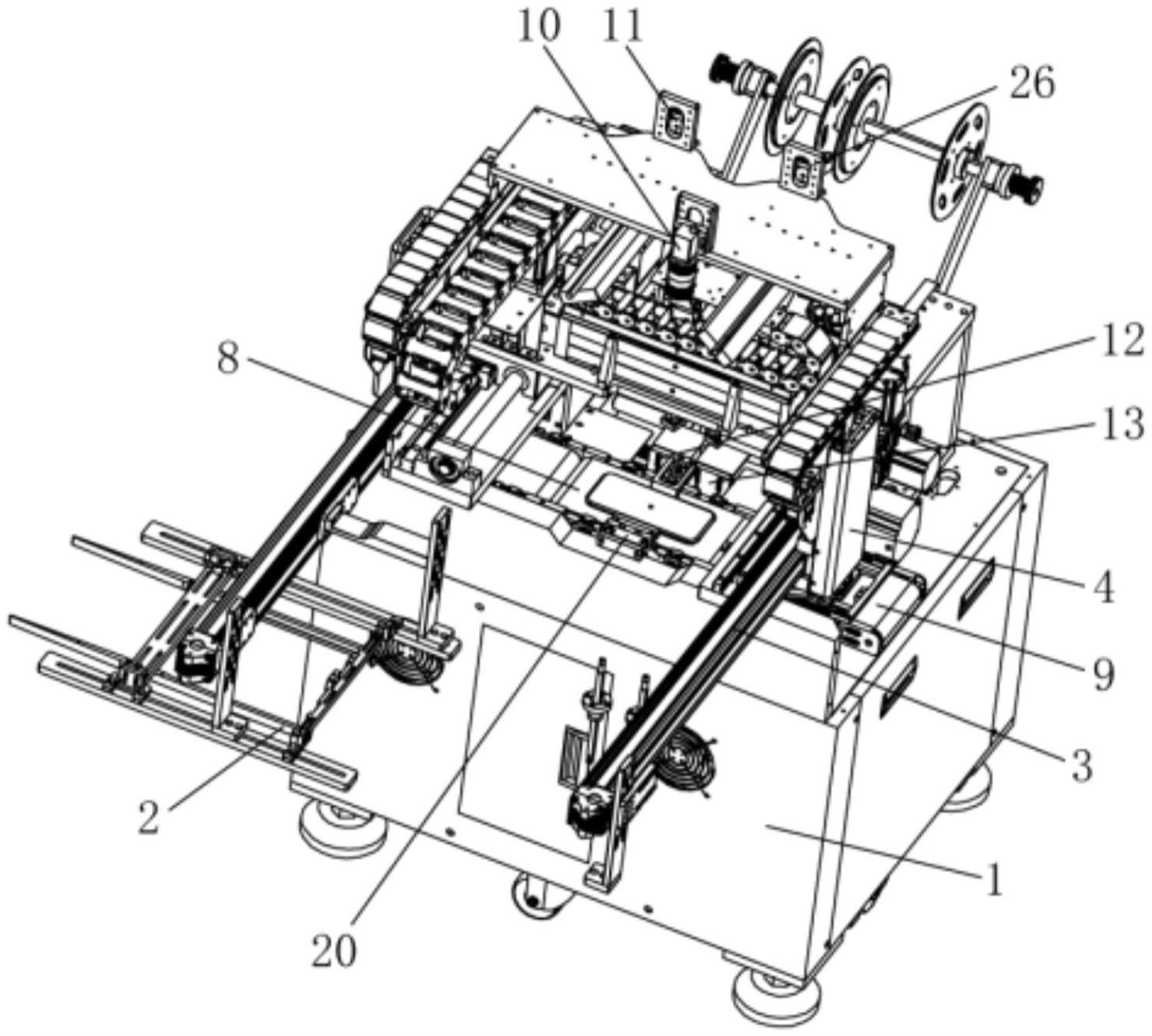
1.一种辅料定位取的贴辅料机,包括机壳(1),其特征在于:所述机壳(1)靠近流水线的一侧设有用于对手机壳进行导向定位的导向机构(2),所述导向机构(2)位于流水线上,所述机壳(1)靠近导向机构(2)的一侧设有上料机构,所述机壳(1)远离导向机构(2)的一侧设有下料机构,所述上料机构与下料机构之间设有拉线机构,所述机壳(1)远离流水线的一侧设有对辅料进行剥料的剥料机构,所述机壳(1)上设有用于对手机壳进行拍照的手机壳拍照相机(10)、用于对已剥辅料进行拍照的辅料拍照相机、用于吸附已剥辅料并将辅料贴合至手机壳的取贴料机械手(16)、用于对机械手(16)上辅料进行纠偏的纠偏相机、以及用于采集信号及控制贴辅料机工作的控制系统(22);
2.根据权利要求1所述的一种辅料定位取的贴辅料机,其特征在于:所述导向机构(2)上设有第一来料感应器,所述第一来料感应器与控制系统(22)信号连接。
3.根据权利要求1所述的一种辅料定位取的贴辅料机,其特征在于:所述上料机构包括上料滑轨(5)与上料机械手(6),所述上料机械手(6)滑动设于上料滑轨(5)上,所述上料机械手(6)用于将导向机构(2)导向定位的手机壳进行移动至拉线机构上,所述下料机构包括下料滑轨(3)与下料机械手(4),所述下料机械手(4)滑动设于下料滑轨(3)上,所述下料机械手(4)用于将拉线机构上已贴辅料的手机壳移动至流水线上,所述上料机械手(6)与下料机械手(4)分别与控制系统(22)信号连接。
4.根据权利要求3所述的一种辅料定位取的贴辅料机,其特征在于:所述拉线机构包括上料拉线(7)、定料拉线(8)以及下料拉线(9),所述上料拉线(7)与上料机械手(6)对应设置,所述下料拉线(9)与下料机械手(4)对应设置,所述定料拉线(8)位于上料拉线(7)与下料拉线(9)之间,所述定料拉线(8)上设有用于将手机壳进行夹紧定位的夹紧机构(20),所述夹紧机构(20)上设有第二来料感应器,所述第二来料感应器与控制系统(22)信号连接。
5.根据权利要求1所述的一种辅料定位取的贴辅料机,其特征在于:所述取贴料机械手(16)通过驱动模组驱动移动对置于剥料机构的第一辅料剥料板(14)上的辅料及对置于剥料机构的第二辅料剥料板(15)上的辅料进行吸附,并移动至拉线机构的定料拉线(8)位置对手机壳进行贴辅料,所述驱动模组包括z轴模组(17)、y轴模组(18)以及x轴模组(19),所述取贴料机械手(16)安装于z轴模组(17)上,并通过z轴模组(17)驱动升降,所述z轴模组(17)滑动安装于y轴模组(18)上,所述y轴模组(18)滑动安装于x轴模组(19)上,所述取贴料机械手(16)与控制系统(22)信号连接。
6.根据权利要求1所述的一种辅料定位取的贴辅料机,其特征在于:所述机壳(1)上罩设有机罩(31),所述机壳(1)的底部设有万向滚轮(23)与定位支撑脚(24)。
技术总结
本技术涉及手机壳贴辅料技术领域,特指一种辅料定位取的贴辅料机,包括机壳,机壳靠近流水线的一侧设有用于对手机壳进行导向定位的导向机构,导向机构位于流水线上,机壳靠近导向机构的一侧设有上料机构,机壳远离导向机构的一侧设有下料机构,上料机构与下料机构之间设有拉线机构,机壳远离流水线的一侧设有对辅料进行剥料的剥料机构,机壳上设有用于对手机壳进行拍照的手机壳拍照相机、用于对已剥辅料进行拍照的辅料拍照相机、用于吸附已剥辅料并将辅料贴合至手机壳的取贴料机械手、用于对机械手上辅料进行纠偏的纠偏相机、以及用于采集信号及控制贴辅料机工作的控制系统。通过机械代替人工作业,其工作效率高,且不易出错,贴合更精准。
技术研发人员:李永立
受保护的技术使用者:深圳悦和精密技术有限公司
技术研发日:20221031
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!