分体式多轴机器人FDM送丝3D打印装置
本发明属于结构工程和增材制造,尤其涉及一种分体式多轴机器人fdm送丝3d打印装置,多轴指3d打印旋转轴总数大于3,包括机械臂旋转轴和变位机旋转轴。
背景技术:
1、3d打印技术相比于传统制造工艺,具有高效率、高精度等优势,更加适应复杂结构的加工制造。然而3d打印仍需结构符合相应制造约束以确保打印成功;在诸多制造约束中,重力导致的悬垂效应是3d打印的主要约束之一;悬垂效应即当结构边界与水平面夹角小于临界值时,由于重力存在,材料沉积过程会出现塌落现象,影响打印质量,甚至导致打印失败。
2、克服悬垂效应的有效方法是从结构设计角度出发,在结构优化设计中引入角度约束以获得满足角度制造约束的最优构型;常规的3轴机器人3d打印,虽能获得符合制造约束的自支撑结构以避免支撑浪费,但往往会造成材料用量的大幅增加与结构性能的大幅下降。
3、随着机械工业的迅速发展,多轴3d打印技术被广泛应用于航空航天、车辆工程等领域;大于3轴的多轴3d打印机具有自由旋转基台,在打印过程中通过动态调整打印方向以避免悬垂效应,有效解决了3轴3d打印自支撑结构体积增大与性能大幅下降的问题。因而,合理有效的多轴机器人3d打印装置设计和构造是复杂结构一体优化设计和制造的重要前提。
4、传统fdm塑料3d打印机一般为箱体式3d打印模式或移动式龙门3d打印模式,由于移动轴数小于3轴,同时由于打印空间的限制,打印结构件的尺寸受到极大的限制,且需要大量的支撑,无法满足无支撑条件下打印复杂增材结构件的需求。
技术实现思路
1、本发明的目的是克服现有技术中的不足,提供一种分体式多轴机器人fdm送丝3d打印装置。
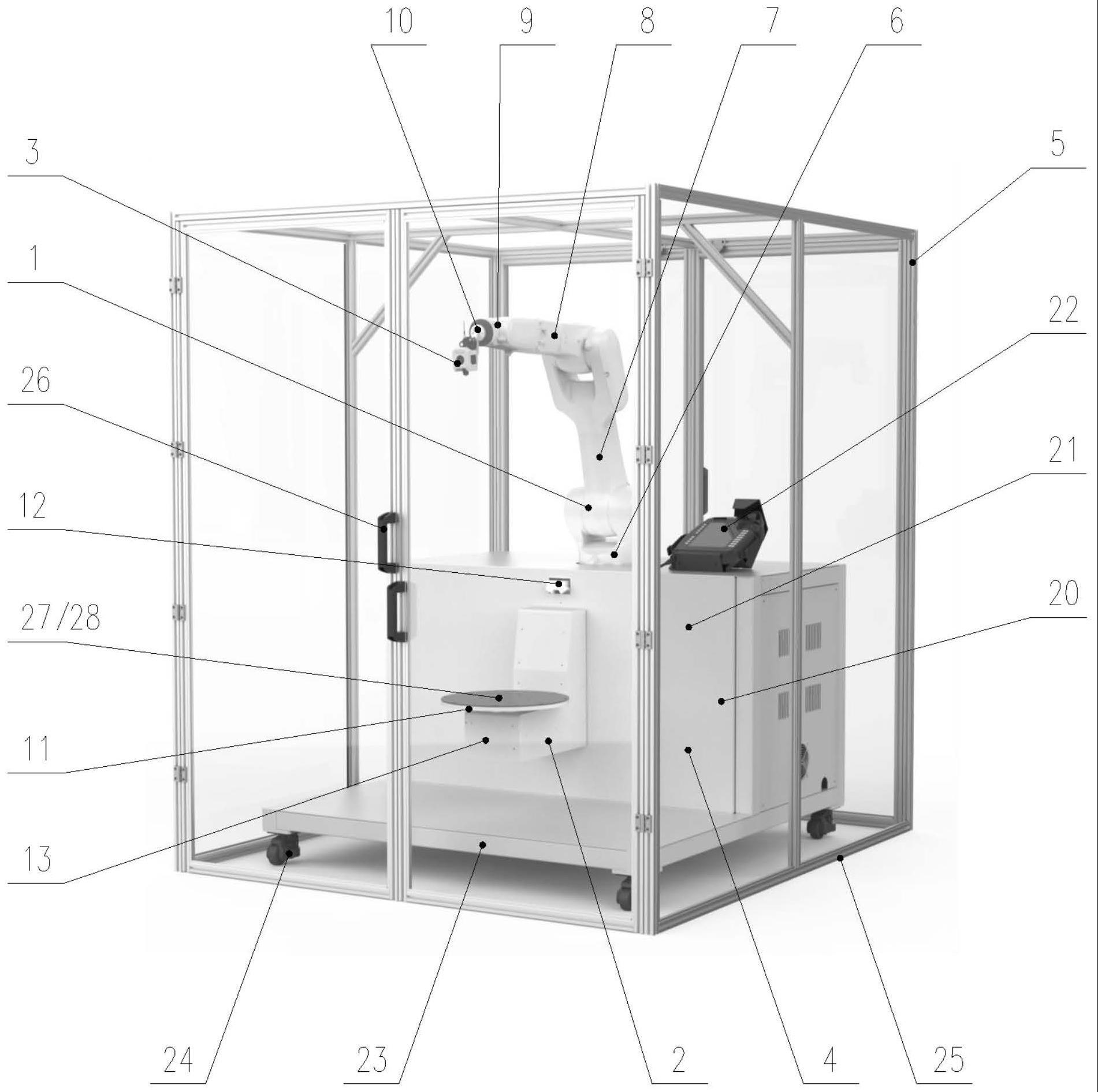
2、这种分体式多轴机器人fdm送丝3d打印装置,包括:内部打印装置和外部框架,内部打印装置底部设有福马轮,内部打印装置包括六轴工业机器人、两轴变位机、fdm打印头和控制系统;
3、控制系统包括控制柜、控制器和示教器,控制器设于控制柜内,控制柜上设有示教器;
4、六轴工业机器人设于控制柜上方,六轴工业机器人包括底座、主臂、上臂、手腕和末端,六轴工业机器人设有六个转动轴,fdm打印头设于六轴工业机器人的末端;
5、两轴变位机设于控制柜一侧,两轴变位机包括圆形工作台和外部轴电机,圆形工作台设于fdm打印头的正下方,圆形工作台表面依次设有热床加热片和可拆卸打印平板,可拆卸打印平板上设有快拆孔;圆形工作台底部通过外部轴电机连接控制系统;圆形工作台设有两个转动轴,分别为旋转轴和摆动轴;
6、两轴变位机位于六轴工业机器人的前下方,构成八轴联动机构;
7、外部框架设于内部打印装置外侧,外部框架的前后面均设有平开门。
8、作为优选:可拆卸打印平板上设有多个凹陷的圆孔。
9、作为优选:示教器设于六轴工业机器人的一侧,控制柜底部设有底座基板,福马轮支撑在底座基板下方。
10、作为优选:fdm打印头包括喷嘴、陶瓷加热环、散热环和喉管,喷嘴为耐高温红宝石材质,喷嘴的直径为0.6~1.0mm,送丝接近角最大值为54°。
11、作为优选:圆形工作台绕摆动轴两侧摆动,单侧摆动的最大角度大于等于120°,两轴变位机的两侧对称地设有限位装置;圆形工作台绕旋转轴旋转,旋转轴设于圆形工作台的圆心。
12、这种分体式多轴机器人fdm送丝3d打印装置的使用方法,其特征在于,包括以下步骤:
13、s1、采用结构拓扑优化方法,实现复杂结构的无悬垂约束最优构型设计,并对拓扑优化结果进行后处理;提取结构边界,确定边界单元悬垂角度,划分打印分区,确定局部最优打印方向,进行角度约束的一体优化;提取结构信息,建立3d实体模型,进行分区切片,生成打印路径,导入模型数据至控制器;
14、s2、在圆形工作台的上表面首先粘贴热床加热片,再安装可拆卸打印平板;通过热床加热片对可拆卸打印平板进行加热;利用六轴工业机器人的六个转动轴和圆形工作台的两个转动轴形成共八个转动轴,通过示教器控制六轴工业机器人开始打印;
15、s3、打印完成后,通过快拆孔将可拆卸打印平板卸下。
16、作为优选,步骤s2中,根据需要在外部框架内或外进行打印,在外部框架外进行打印时,首先将外部框架的平开门打开,通过福马轮将内部打印装置移出外部框架再固定。
17、作为优选,步骤s2中,进行首层打印时,首层打印材料底部填充在可拆卸打印平板上的凹陷圆孔内。
18、本发明的有益效果是:
19、1)本发明提供的分体式多轴机器人fdm送丝3d打印装置,搭建装有fdm打印头的六轴工业机器人,两轴变位机通过旋转轴实现无限角度的旋转,通过摆动轴实现有限角度的摆动,解决了传统fdm塑料3d打印的结构件尺寸受限问题,制造具有复杂外观造型、内部镂空的大尺寸塑料结构件和结构体系。
20、2)内部打印装置和外部框架可分体式移动,实现分体可移动式结构效果,增大3d打印的机器人开放运动空间。
21、3)本发明采用为多轴3d打印设计的细长型无阻碍热端部件,通过设置实现打印过程中送丝接近角最大可达到54°的fdm打印头,解决了一般3d打印头引起的小接近角碰撞问题;采用耐高温红宝石喷嘴,实现了长时间稳定打印,解决了3d打印过程中因喷嘴失效引起的结构件缺陷。
技术特征:
1.一种分体式多轴机器人fdm送丝3d打印装置,其特征在于,包括:内部打印装置和外部框架(5),内部打印装置底部设有福马轮(24),内部打印装置包括六轴工业机器人(1)、两轴变位机(2)、fdm打印头(3)和控制系统(4);
2.根据权利要求1所述的分体式多轴机器人fdm送丝3d打印装置,其特征在于:可拆卸打印平板(28)上设有多个凹陷的圆孔。
3.根据权利要求1所述的分体式多轴机器人fdm送丝3d打印装置,其特征在于:示教器(22)设于六轴工业机器人(1)的一侧,控制柜(20)底部设有底座基板(23),福马轮(24)支撑在底座基板(23)下方。
4.根据权利要求1所述的分体式多轴机器人fdm送丝3d打印装置,其特征在于:fdm打印头(3)包括喷嘴(16)、陶瓷加热环(17)、散热环(18)和喉管(19),喷嘴(16)为耐高温红宝石材质,喷嘴(16)的直径为0.6~1.0mm,送丝接近角最大值为54°。
5.根据权利要求1所述的分体式多轴机器人fdm送丝3d打印装置,其特征在于:圆形工作台(11)绕摆动轴(15)两侧摆动,单侧摆动的最大角度大于等于120°,两轴变位机(2)的两侧对称地设有限位装置(12);圆形工作台(11)绕旋转轴(14)旋转,旋转轴(14)设于圆形工作台(11)的圆心。
6.如权利要求1至5中任一所述的分体式多轴机器人fdm送丝3d打印装置的使用方法,其特征在于,包括以下步骤:
7.根据权利要求6中所述的分体式多轴机器人fdm送丝3d打印装置的使用方法,其特征在于,步骤s2中,根据需要在外部框架(5)内或外进行打印,在外部框架(5)外进行打印时,首先将外部框架(5)的平开门(26)打开,通过福马轮(24)将内部打印装置移出外部框架(5)再固定。
8.根据权利要求6中所述的分体式多轴机器人fdm送丝3d打印装置的使用方法,其特征在于,步骤s2中,进行首层打印时,首层打印材料底部填充在可拆卸打印平板(28)上的凹陷圆孔内。
技术总结
本发明涉及一种分体式多轴机器人FDM送丝3D打印装置,包括内部打印装置和外部框架,内部打印装置底部设有福马轮,内部打印装置包括六轴工业机器人、两轴变位机、FDM打印头和控制系统;包括步骤:建立3D实体模型,生成打印路径,导入模型数据至控制器;在圆形工作台的上表面首先粘贴热床加热片,通过热床加热片对可拆卸打印平板进行加热;利用六轴工业机器人和圆形工作台形成共八个转动轴,开始打印;通过快拆孔将可拆卸打印平板卸下。本发明的有益效果是:解决了传统FDM塑料3D打印的结构件尺寸受限问题,制造具有复杂外观造型、内部镂空的大尺寸塑料结构件和结构体系;实现分体可移动式结构效果,增大3D打印的机器人开放运动空间。
技术研发人员:王震,叶俊,赵阳,丁智,胡英涛,丁超,陆泓家,汤慧萍
受保护的技术使用者:浙大城市学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!