一种用于注塑机的多功能机械手的制作方法
本发明涉及机械手,尤其涉及一种用于注塑机的多功能机械手。
背景技术:
1、注塑是一种工业产品生产造型的方法,产品通常使用橡胶注塑和塑料注塑,注塑还可分注塑成型模压法和压铸法,注塑机是将热塑性塑料或热固性料利用塑料成型模具制成各种形状的塑料制品的主要成型设备。
2、注塑机在生产过程中,需要将模具中脱模后的产品取出,由于脱模后的产品温度较高,人工取件时容易发生危险,注塑产品一般可分为实心状和空心状,对于大部分实心状以及厚壁空心状的注塑产品,通过传统的机械手可以正常的夹取,但对于薄壁空心状的注塑产品,其强度较低,采用传统的机械手夹取注塑产品时,当夹取力过大时,注塑产品会发生严重形变,容易导致注塑产品的损坏,夹取力过小时,又不能够将注塑产品顺利的夹起,影响生产效率。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于注塑机的多功能机械手。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种用于注塑机的多功能机械手,包括机械臂,以及设置在机械臂自由端的抓取机构,所述抓取机构包括第一壳体和第二壳体,所述第一壳体固定设置在第二壳体的上端,所述第二壳体的内部设置相互垂直的滑杆,所述滑杆为水平设置,每根滑杆上套设有两个相互对应的套环,所述套环的下端固定连接有第一活动杆,所述第一壳体上安装有驱动套环沿对应滑杆滑动的伺服推杆,所述第二壳体上设置有供第一活动杆滑动的通槽,所述第一活动杆的杆体上套设有第一气囊,所述第一活动杆的下端设置有吸盘,第一活动杆之间相互配合对物品进行抓取。
4、优选的,所述第一活动杆相互靠近的侧壁上以及相互远离的侧壁上均设置有吸盘,所述第一活动杆的内部设置有第二输气通道,所述第二输气通道与吸盘连通,且第二输气通道通过第一软管与真空泵的进口端相连接,所述真空泵安装在第一壳体的内部,所述第一壳体上设置有透气孔。
5、优选的,所述第一活动杆的下端处于同一水平面,所述第一活动杆的下端还设置有吸盘,通过第一活动杆下端的吸盘,可以对板状的注塑产品进行抓取,即机械臂带动抓取机构运动,使得第一活动杆的吸盘紧贴注塑产品,此时对应的吸盘触发机构被触发,通过吸盘吸住注塑产品,从而实现板状注塑产品的抓取。
6、优选的,所述第一活动杆上分别设置有与吸盘相适配的吸盘触发机构,当吸盘触发机构被触发时,对应的吸盘与第二输气通道连通。
7、优选的,所述吸盘触发机构包括弹性块、第二活动杆、活动板、弹簧、堵块和第三输气通道,所述第一活动杆的内部设置容纳活动板的空腔,所述第三输气通道的出口端与空腔相连通,所述堵块与第三输气通道的出口端相适配,所述堵块的端部与活动板固定连接,所述弹性块通过第二活动杆与活动板相连接,所述弹簧设置在活动板与第一活动杆的内壁之间,当吸盘紧贴注塑产品时,吸盘触发机构被触发,注塑产品挤压弹性块,弹性块推动第二活动杆运动,第二活动杆推动活动板运动,活动板运动时,使得堵块与第三输气通道的出口端分离,从而使得吸盘与空腔连通,未与注塑产品接触的吸盘,其活动板在弹簧的作用下与空腔的内壁紧贴,堵块卡在第三输气通道的出口端,对应的吸盘未被接通。
8、优选的,所述活动板的端部为圆弧形,第一活动杆下端吸盘所对应的活动板,该活动板移动后两端与另两个活动板的端面相接触;第一活动杆侧壁吸盘所对应的活动板,该活动板移动后下端与最下方的活动板的端面相接触。
9、优选的,所述空腔的内壁上还固定安装有固定块,所述固定块的中部开设有插槽,所述插槽内插设有水平设置的活动块,当第一活动杆一侧的弹性块受到挤压时,弹性块通过第二活动杆推动活动板运动,活动板推动活动块运动,使得活动块的两端正好与活动板相接触,所述活动块上安装有第二气囊,所述第二气囊的端部延伸至活动块的外侧,且第二气囊的端部与插槽的内壁相接触,当其中一侧的活动板被打开,通过真空泵对吸盘开始抽真空时,空腔内部压力慢慢变低,第二气囊发生膨胀,第二气囊与插槽的内壁之间摩擦力变大,使得活动块无法移动,从而使得另一块活动板不会被打开,保证吸盘能够正常的工作。
10、优选的,每个吸盘的内部设置有至少两组弹性块,所述弹性块位于第三输气通道的两侧,弹性块的端面与吸盘的内壁密封连接。
11、优选的,所述第一活动杆上设置有与第一气囊连通的第一输气通道,所述第一输气通道通过第二软管与空气压缩泵相连接,所述空气压缩泵安装在第一壳体的内部。
12、优选的,所述套环的外壁上固定设置有固定块,所述伺服推杆的输出端与固定块固定连接。
13、本发明的有益效果是:
14、1、本发明提出的多功能机械手,可以对实心状和空心状的注塑产品进行快速抓取,对于实心状的注塑产品,通过第一活动杆之间相互靠近,将注塑产品夹住,对于薄壁空心状的注塑产品,将第一活动杆贴近注塑产品,使得吸盘紧贴注塑产品,通过真空泵对吸盘抽真空,将注塑产品吸住,避免注塑产品会发生严重形变,使得注塑产品不易发生损坏。
15、2、本发明提出的多功能机械手,第一活动杆上分别设置有与吸盘相适配的吸盘触发机构,当吸盘触发机构被触发时,对应的吸盘与第二输气通道连通,使得与注塑产品紧贴的吸盘被接通,其它的吸盘处于未接通状态,当真空泵启动时,保证与注塑产品紧贴的吸盘吸力充足,便于产品的抓取,同时能够减少动力的损失。
16、3、本发明提出的多功能机械手,活动板的端部为圆弧形,第一活动杆下端吸盘所对应的活动板,该活动板移动后两端与另两个活动板的端面相接触;第一活动杆侧壁吸盘所对应的活动板,该活动板移动后下端与最下方的活动板的端面相接触,即下端吸盘所对应的活动板运动后,另两个活动板无法移动,侧壁吸盘所对应的活动板移动后,下方的活动板无法移动,配合活动块,使得单个第一活动杆上同一时间内只有一个吸盘在工作,保证吸盘的吸力足,同时避免气源的浪费。
技术特征:
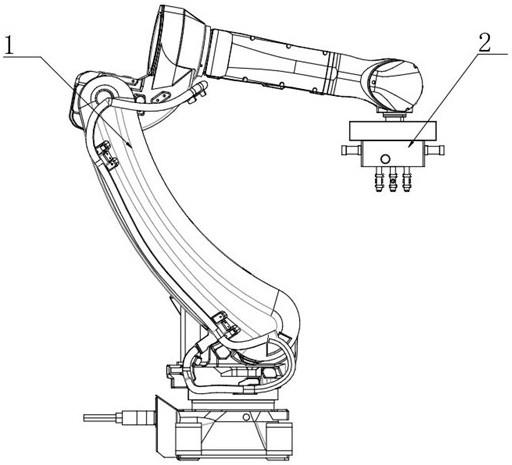
1.一种用于注塑机的多功能机械手,包括机械臂(1),以及设置在机械臂(1)自由端的抓取机构(2),其特征在于,所述抓取机构(2)包括第一壳体(201)和第二壳体(202),所述第一壳体(201)固定设置在第二壳体(202)的上端,所述第二壳体(202)的内部设置相互垂直的滑杆(203),所述滑杆(203)为水平设置,每根滑杆(203)上套设有两个相互对应的套环(204),所述套环(204)的下端固定连接有第一活动杆(205),所述第一壳体(201)上安装有驱动套环(204)沿对应滑杆(203)滑动的伺服推杆(209),所述第二壳体(202)上设置有供第一活动杆(205)滑动的通槽(223),所述第一活动杆(205)的杆体上套设有圆环状的第一气囊(207),所述第一活动杆(205)的下端设置有吸盘(206),第一活动杆(205)之间相互配合对物品进行抓取。
2.根据权利要求1所述的一种用于注塑机的多功能机械手,其特征在于,所述第一活动杆(205)相互靠近的侧壁上以及相互远离的侧壁上均设置有吸盘(206),所述第一活动杆(205)的内部设置有第二输气通道(211),所述第二输气通道(211)与吸盘(206)连通,且第二输气通道(211)通过第一软管(219)与真空泵(220)的进口端相连接,所述真空泵(220)安装在第一壳体(201)的内部,所述第一壳体(201)上设置有透气孔。
3.根据权利要求2所述的一种用于注塑机的多功能机械手,其特征在于,所述第一活动杆(205)的下端处于同一水平面,所述第一活动杆(205)的下端还设置有吸盘(206)。
4.根据权利要求3所述的一种用于注塑机的多功能机械手,其特征在于,所述第一活动杆(205)上分别设置有与吸盘(206)相适配的吸盘触发机构,当吸盘触发机构被触发时,对应的吸盘(206)与第二输气通道(211)连通。
5.根据权利要求4所述的一种用于注塑机的多功能机械手,其特征在于,所述吸盘触发机构包括弹性块(213)、第二活动杆(214)、活动板(215)、弹簧(216)、堵块(217)和第三输气通道(218),所述第一活动杆(205)的内部设置容纳活动板(215)的空腔(212),所述第三输气通道(218)的出口端与空腔(212)相连通,所述堵块(217)与第三输气通道(218)的出口端相适配,所述堵块(217)的端部与活动板(215)固定连接,所述弹性块(213)通过第二活动杆(214)与活动板(215)相连接,所述弹簧(216)设置在活动板(215)与第一活动杆(205)的内壁之间。
6.根据权利要求5所述的一种用于注塑机的多功能机械手,其特征在于,所述活动板(215)的端部为圆弧形,第一活动杆(205)下端吸盘(206)所对应的活动板(215),该活动板(215)移动后两端与另两个活动板(215)的端面相接触;第一活动杆(205)侧壁吸盘(206)所对应的活动板(215),该活动板(215)移动后下端与最下方的活动板(215)的端面相接触。
7.根据权利要求6所述的一种用于注塑机的多功能机械手,其特征在于,所述空腔(212)的内壁上还固定安装有固定块(224),所述固定块(224)的中部开设有插槽,所述插槽内插设有水平设置的活动块(225),当第一活动杆(205)一侧的弹性块(213)受到挤压时,弹性块(213)通过第二活动杆(214)推动活动板(215)运动,活动板(215)推动活动块(225)运动,使得活动块(225)的两端正好与活动板(215)相接触,所述活动块(225)上安装有第二气囊(226),所述第二气囊(226)的端部延伸至活动块(225)的外侧,且第二气囊(226)的端部与插槽的内壁相接触。
8.根据权利要求5或7所述的一种用于注塑机的多功能机械手,其特征在于,每个吸盘(206)的内部设置有至少两组弹性块(213),所述弹性块(213)位于第三输气通道(218)的两侧,弹性块(213)的端面与吸盘(206)的内壁密封连接。
9.根据权利要求8所述的一种用于注塑机的多功能机械手,其特征在于,所述第一活动杆(205)上设置有与第一气囊(207)连通的第一输气通道(210),所述第一输气通道(210)通过第二软管(221)与空气压缩泵(222)相连接,所述空气压缩泵(222)安装在第一壳体(201)的内部。
10.根据权利要求9所述的一种用于注塑机的多功能机械手,其特征在于,所述套环(204)的外壁上固定设置有固定块(208),所述伺服推杆(209)的输出端与固定块(208)固定连接。
技术总结
本发明涉及机械手技术领域,尤其涉及一种用于注塑机的多功能机械手,包括机械臂,以及设置在机械臂自由端的抓取机构,所述抓取机构包括第一壳体和第二壳体,所述第一壳体固定设置在第二壳体的上端,所述第二壳体的内部设置相互垂直的滑杆,所述滑杆为水平设置,每根滑杆上套设有两个相互对应的套环,所述套环的下端固定连接有第一活动杆,所述第一壳体上安装有驱动套环沿对应滑杆滑动的伺服推杆,所述第二壳体上设置有供第一活动杆滑动的通槽,所述第一活动杆的杆体上套设有第一气囊,所述第一活动杆的下端设置有吸盘,第一活动杆之间相互配合对物品进行抓取。
技术研发人员:许翔,祁瑜
受保护的技术使用者:常州海盟塑业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!