一种传感器柔性线束自动注塑成型装置的制作方法
本发明涉及传感器柔性线束注塑,具体涉及一种传感器柔性线束自动注塑成型装置。
背景技术:
1、随着时代的发展,科学技术的不断进步,各类电子、数码产品被广泛应用,越来越普及化,成为现代生活中不可或缺的一部分,传感器的线束需要多次注塑成型。目前,大多数场合依旧需要人工实现传感器线束的多次注塑,工作效率低、劳动强度大,同时还存在安全隐患。
2、基于此,市面上出现了一些能够取代人力来实现传感器线束注塑的设备,但在大批量、多次传感器线束、以及柔性线束注塑成型时,柔性线束注塑时易出现柔性线束抓取、转移难的问题,因此传统的注塑装置仍然无法满足需求,必须使用机器配合人工才能完成传感器线束注塑成型工作,劳动强度大、工作效率低。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种传感器柔性线束自动注塑成型装置,解决现有技术中传感器柔性线束注塑技术领域中的柔性线束抓取、转移难,从而导致工作效率慢、自动化程度低、劳动强度大的技术问题。
2、为达到上述技术目的,本发明的技术方案提供一种传感器柔性线束自动注塑成型装置,包括:
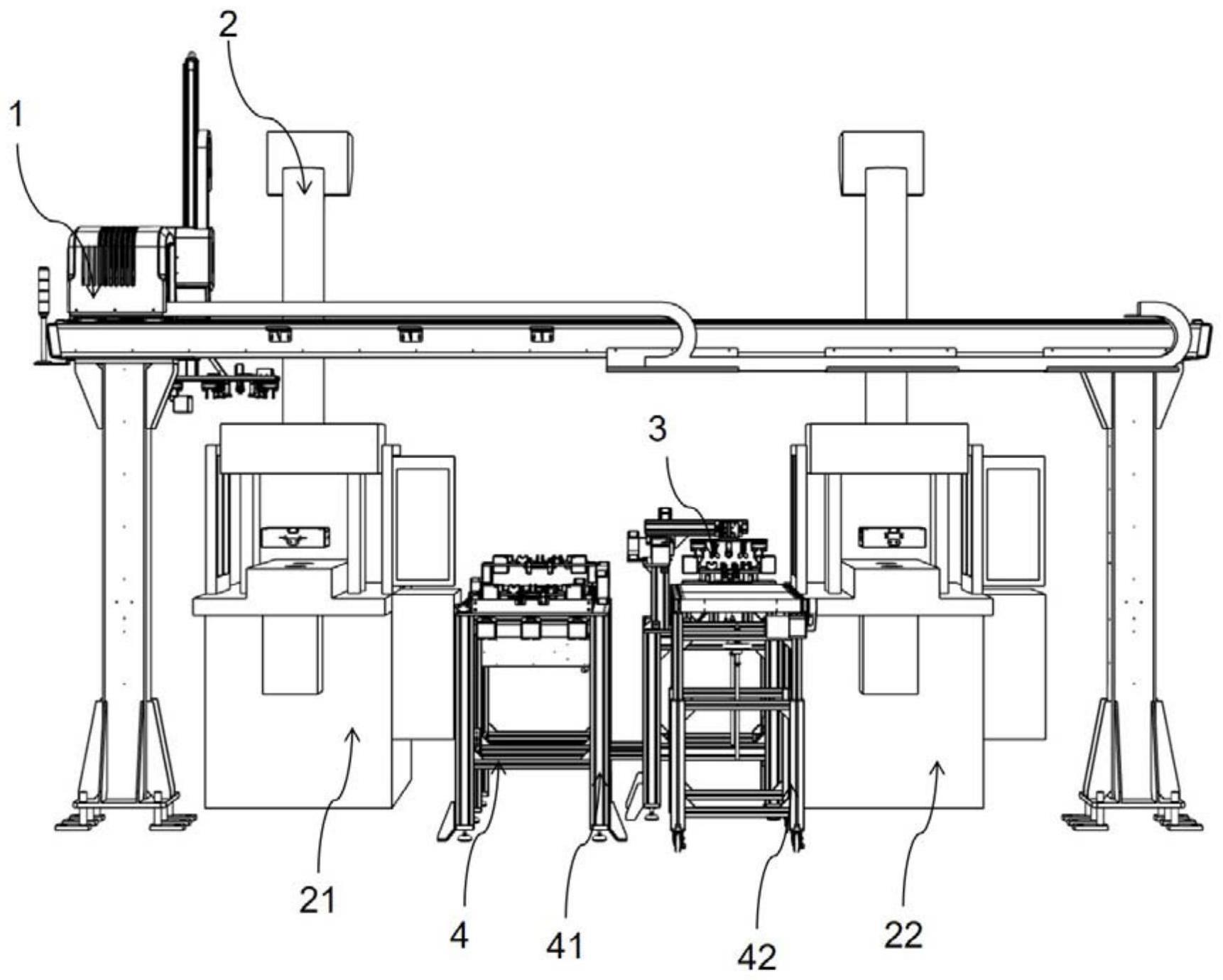
3、工件转移机构,所述工件转移机构包括基座、直行导轨组件、抓取组件;所述直行导轨组件与所述基座上端固定连接;所述抓取组件与所述直行导轨组件固定连接;
4、注塑成型系统,所述工件转移机构用于将待注塑工件转移至所述注塑成型系统;所述注塑成型系统包括一次侧成型机构、二次侧成型机构;所述工件转移机构先将待注塑工件转移至所述一次侧成型机构注塑,其次所述工件转移机构将一次成型工件转移至所述二次侧成型机构进行注塑,最后所述工件转移机构将注塑完成工件转移至剪切机构进行剪切注塑工件的水口。
5、与现有技术相比,本发明的有益效果包括:
6、1、本发明提供的传感器柔性线束自动注塑成型装置利用直行导轨组件以及抓取组件全自动的实现了待注塑成型工件的抓取与转移。大大的节省了时间,代替了人工,省时省力,提高了注塑成型的工作效率。
7、2、本发明提供的传感器柔性线束自动注塑成型装置利用所述定位夹具以及水口夹具实现了传感器柔性线束以及二次注塑成型产生的水口的抓取以及定位,解决了传感器柔性线束自动化生产中,柔性线束抓取、转移难的问题。
8、3、本发明提供的传感器柔性线束自动注塑成型装置利用工件转移机构、注塑成型机构、剪切机构以及输送机构实现流水线注塑成型作业,整个过程实现自动化,取代了大量的人工,解决现有技术中传感器线束注塑技术领域中的工作效率慢、自动化程度低、劳动强度大的技术问题。
技术特征:
1.一种传感器柔性线束自动注塑成型装置,其特征在于,包括:
2.根据权利要求1所述的传感器柔性线束自动注塑成型装置,其特征在于,所述抓取组件包括执行臂、抓取底座、定位夹具、抓取夹具、水口夹具;所述执行臂与所述抓取底座固定连接;所述定位夹具、抓取夹具以及水口夹具均固定连接于所述执行臂的底端;所述抓取夹具包括抓取驱动源、抓取滑块以及抓取执行臂;所述抓取滑块与所述抓取驱动源滑动连接;所述抓取执行臂与所述抓取滑块固定连接;一个所述抓取驱动源滑动连接两个所述抓取滑块;当所述抓取驱动源处于工作状态时,驱动两个所述抓取滑块相向滑动。
3.根据权利要求2所述的传感器柔性线束自动注塑成型装置,其特征在于,所述定位夹具包括定位驱动源、定位滑块以及定位执行臂;所述定位滑块与所述定位驱动源的执行端滑动连接;所述定位执行臂与所述定位滑块固定连接;一个所述定位驱动源滑动连接两个所述定位滑块;当所述定位驱动源处于工作状态时,驱动两个所述定位滑块相向滑动实现待注塑工件的定位。
4.根据权利要求3所述的传感器柔性线束自动注塑成型装置,其特征在于,所述直行导轨组件包括第一支撑体、第二支撑体;所述第一支撑体的两端与所述基座固定连接;所述第一支撑体的上端固定连接有第一直线导轨;所述第一直线导轨上滑动连接有第一滑块;所述第一滑块的上端通过第一连接板与所述第二支撑体固定连接。
5.根据权利要求4所述的传感器柔性线束自动注塑成型装置,其特征在于,所述第二支撑体的侧端以及顶端均固定连接有第二直线导轨;所述第二直线导轨上滑动连接有第二滑块;所述第二滑块通过第二连接板与第三连接板固定连接;所述第三连接板的一侧固定连接有第三滑块;所述执行臂上固定连接有第三直线导轨;所述第三滑块与所述第三直线导轨滑动连接。
6.根据权利要求1所述的传感器柔性线束自动注塑成型装置,其特征在于,还包括输送机构;所述输送机构包括工件输入组件以及工件输出组件;所述工件输出组件位于所述剪切机构的一端;当所述剪切机构将待剪切工件剪切后放置所述工件输出组件运输至下一工位;所述工件输入组件包括基台、工件放置台;所述基台的上端固定连接有输入直线导轨;所述输入直线导轨的上端滑动连接有输入滑块;所述输入滑块的顶端与所述工件放置台固定连接。
7.根据权利要求2所述的传感器柔性线束自动注塑成型装置,其特征在于,所述水口夹具包括水口夹具向下驱动源、水口夹具驱动源、水口夹具滑块以及水口夹具执行臂;所述水口夹具向下驱动源与所述抓取底座固定连接;所述水口夹具向下驱动源的输出轴与所述水口夹具驱动源固定连接;所述水口夹具驱动源与所述水口夹具滑块滑动连接;所述水口夹具滑块与所述水口夹具执行臂固定连接。
8.根据权利要求1所述的传感器柔性线束自动注塑成型装置,其特征在于,所述剪切机构包括剪切基座、剪切支架、剪切驱动源以及剪刀;剪切支架与所述剪切基座的顶端固定连接;所述剪切驱动源位于所述剪切支架的顶端;所述剪刀与所述剪切驱动源驱动连接。
9.根据权利要求8所述的传感器柔性线束自动注塑成型装置,其特征在于,所述剪切机构还包括剪切第一支撑体、剪切第二支撑体、剪切第一直行导轨、剪切第二直行导轨以及剪切连接板;所述剪切第一支撑体通过剪切移动支架与所述剪切基座固定连接;所述剪切第一直行导轨与所述剪切第一支撑体固定连接;所述剪切第一直行导轨滑动连接有剪切第一滑块;所述剪切第一滑块与所述剪切第二支撑体固定连接。
10.根据权利要求9所述的传感器柔性线束自动注塑成型装置,其特征在于,所述剪切第二支撑体与所述剪切第二直线导轨固定连接;所述剪切第二直线导轨滑动连接有剪切第二滑块;所述剪切第二滑块与所述剪切连接板固定连接;所述剪切连接板的底端固定连接有所述定位夹具、所述抓取夹具、所述水口夹具;所述剪切基座上还设置有剪切工料支架;所述剪切工料支架上固定连接有所述工件放置台。
技术总结
本发明公开了一种传感器柔性线束自动注塑成型装置,包括:工件转移机构、注塑成型系统。工件转移机构包括基座、直行导轨组件、抓取组件,直行导轨组件与基座上端固定连接,抓取组件与直行导轨组件固定连接,工件转移机构用于将待注塑工件转移至注塑成型系统,注塑成型系统包括一次侧成型机构、二次侧成型机构,工件转移机构先将待注塑工件转移至一次侧成型机构注塑,其次工件转移机构将一次成型工件转移至二次侧成型机构进行注塑,最后工件转移机构将注塑完成工件转移至剪切机构进行剪切注塑工件的水口。该发明提供的一种传感器柔性线束自动注塑成型装置解决了传感器柔性线束注塑技术领域中的工作效率慢、自动化程度低、劳动强度大的技术问题。
技术研发人员:朱继勇,胡志刚,李贵山,松本大司,王君峰,周雄刚,加木屋匡宏
受保护的技术使用者:中日龙(襄阳)机电技术开发有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!