一种注塑模架加工系统的制作方法
本技术涉及注塑加工,具体指一种注塑模架加工系统。
背景技术:
1、注塑模架是一种生产塑胶或橡胶制品的工具,也是赋予塑胶制品完整结构和精确尺寸的工具。在其生产加工过程中,注塑成型后的产品还需要进行导套组装、元件连接、合模等加工操作后才能够成为合格成型产品投入使用。
2、目前对于上述加工过程,针对每一项加工处理均设有独立的设备,通常在进行一部分加工后需要将元件进行搬运转移,多个设备之间不能相互配合,且加工过程不可控,由此导致注塑模架的整体加工过程中连接配合程度以及自动化程度较低,进而大大降低了生产效率。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中注塑模架加工效率低、加工过程不可控的问题,提供一种能够将多个设备进行控制连接的注塑模架加工系统。
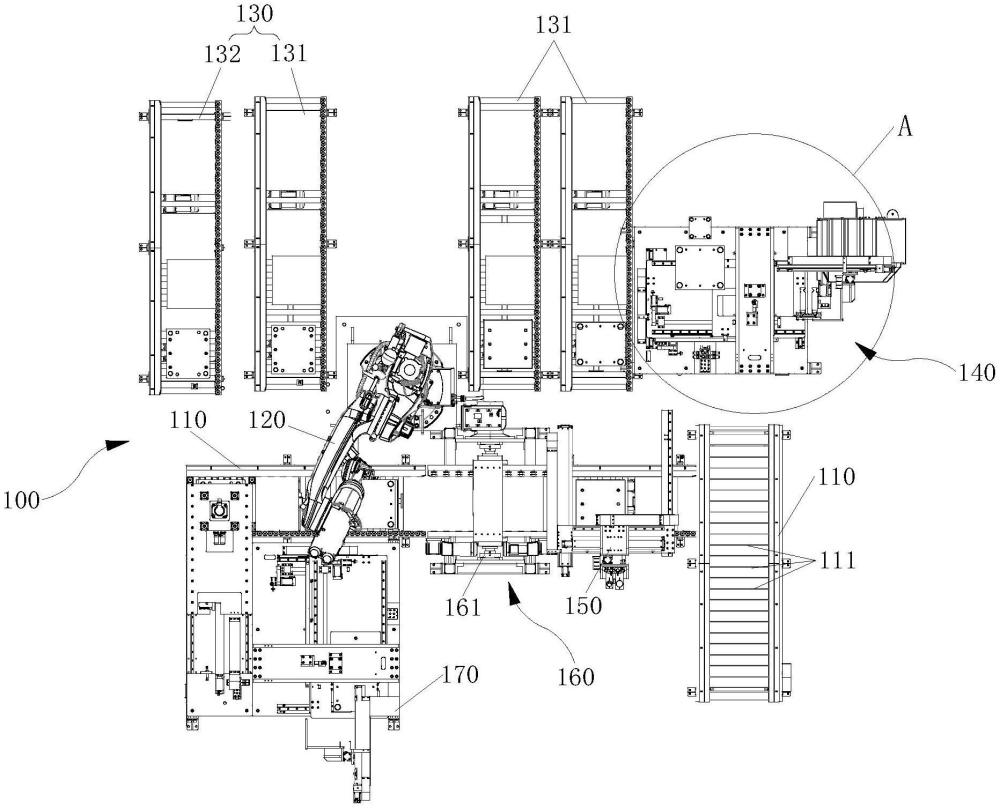
2、为解决上述技术问题,本实用新型提供了一种注塑模架加工系统,包括:加工机构,所述加工机构包括传输组件、设置于所述传输组件内侧的搬运组件,以及沿所述传输组件的运输方向依次设置的上下料组件、导套组装组件、连接组件、翻转组件以及合模组件,所述传输组件围设出加工空间,所述搬运组件于所述加工空间内移动;控制机构,所述控制机构连接所述加工机构,且其包括至少七个控制模块。
3、在本实用新型的一个实施例中,所述搬运组件包括搬运机器人以及吸附件,所述搬运机器人在所述加工空间内移动,所述吸附件连接于所述搬运机器人工作端。
4、在本实用新型的一个实施例中,所述上下料组件包括间隔设置于所述传输组件起始位置的上料传送带以及设置于所述传输组件末尾位置的下料传送带。
5、在本实用新型的一个实施例中,所述导套组装组件包括导套移栽设备、上模移栽装置以及挤压组装件,所述上模移栽装置滑动连接所述挤压组装件,所述导套移载设备设置于所述上模移栽装置上方且沿所述上模移栽装置相反方向滑动连接所述挤压组装件。
6、在本实用新型的一个实施例中,所述导套组装组件还包括导套上料机,所述导套上料机设置于远离所述传输组件一侧。
7、在本实用新型的一个实施例中,所述连接组件包括打螺丝机以及移动模组,所述移动模组垂直于所述传输组件运输方向滑动连接所述打螺丝机。
8、在本实用新型的一个实施例中,所述连接组件还包括连接件上料机,所述连接件上料机设置于远离所述传输组件一侧。
9、在本实用新型的一个实施例中,所述翻转组件包括顶升驱动器、旋转驱动器及承载面,所述顶升驱动器连接于所述承载面下方且驱动所述承载面升降移动,所述旋转驱动器连接所述承载面一侧且驱动所述承载面转动。
10、在本实用新型的一个实施例中,所述合模组件包括液压器、下模移动件以及挤压合模架,所述液压器连接所述挤压合模架上方且驱动所述挤压合模架升降移动,所述下模移动件连接于所述挤压合模架下方且与所述挤压合模架配合合模。
11、在本实用新型的一个实施例中,所述传输组件为带有多个加工位点的滚筒运输线,所述搬运组件为六轴机器人。
12、本实用新型的上述技术方案相比现有技术具有以下优点:
13、本实用新型所述的注塑模架加工系统,通过加工机构集搬运、传输、上下料、导套组装、工字板连接、翻转以及合模加工过程于一体,并且通过控制机构实现了对各个阶段的交互连接,本系统组装加工过程布局合理,自动化程度高,不仅可追溯整体生产过程、全程可视化,而且大大提高了组装加工的效率。
技术特征:
1.一种注塑模架加工系统,其特征在于:包括:
2.根据权利要求1所述的注塑模架加工系统,其特征在于:所述搬运组件包括搬运机器人以及吸附件,所述搬运机器人在所述加工空间内移动,所述吸附件连接于所述搬运机器人工作端。
3.根据权利要求1所述的注塑模架加工系统,其特征在于:所述上下料组件包括间隔设置于所述传输组件起始位置的上料传送带以及设置于所述传输组件末尾位置的下料传送带。
4.根据权利要求1所述的注塑模架加工系统,其特征在于:所述导套组装组件包括导套移栽设备、上模移栽装置以及挤压组装件,所述上模移栽装置滑动连接所述挤压组装件,所述导套移载设备设置于所述上模移栽装置上方且沿所述上模移栽装置相反方向滑动连接所述挤压组装件。
5.根据权利要求4所述的注塑模架加工系统,其特征在于:所述导套组装组件还包括导套上料机,所述导套上料机设置于远离所述传输组件一侧。
6.根据权利要求1所述的注塑模架加工系统,其特征在于:所述连接组件包括打螺丝机以及移动模组,所述移动模组垂直于所述传输组件运输方向滑动连接所述打螺丝机。
7.根据权利要求6所述的注塑模架加工系统,其特征在于:所述连接组件还包括连接件上料机,所述连接件上料机设置于远离所述传输组件一侧。
8.根据权利要求1所述的注塑模架加工系统,其特征在于:所述翻转组件包括顶升驱动器、旋转驱动器及承载面,所述顶升驱动器连接于所述承载面下方且驱动所述承载面升降移动,所述旋转驱动器连接所述承载面一侧且驱动所述承载面转动。
9.根据权利要求1所述的注塑模架加工系统,其特征在于:所述合模组件包括液压器、下模移动件以及挤压合模架,所述液压器连接所述挤压合模架上方且驱动所述挤压合模架升降移动,所述下模移动件连接于所述挤压合模架下方且与所述挤压合模架配合合模。
10.根据权利要求1所述的注塑模架加工系统,其特征在于:所述传输组件为带有多个加工位点的滚筒运输线,所述搬运组件为六轴机器人。
技术总结
本技术提供一种注塑模架加工系统,包括:加工机构,加工机构包括传输组件、设置于传输组件内侧的搬运组件,以及沿传输组件的运输方向依次设置的上下料组件、导套组装组件、连接组件、翻转组件以及合模组件,传输组件围设出加工空间,搬运组件于加工空间内移动;控制机构,控制机构连接加工机构,且其包括至少七个控制模块。本技术所述的注塑模架加工系统,通过加工系统集搬运、传输、上下料、导套组装、连接、翻转以及合模加工过程于一体,并且通过控制机构实现了对各个阶段的交互连接,不仅可追溯整体生产过程、全程可视化,而且大大提高了注塑模架加工的自动化程度和生产加工效率。
技术研发人员:郭兆举
受保护的技术使用者:苏州弘瀚自动化科技有限公司
技术研发日:20230728
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!