一种注塑机取件机械手用夹具及机械手的制作方法
本技术涉及注塑件抓取设备,具体涉及一种注塑机取件机械手用夹具及机械手。
背景技术:
1、注塑完成之后的工件通常都是由机械手将注塑件从注塑机上取下,然后机械手带着工件移动至输送线的上方,之后机械手松开工件,工件在重力的作用下掉落至输送线的输送面上,从而由输送线将工件输送至目标区域的目的。目前,现有的注塑机取件机械手用夹具通常都是由驱动装置驱动两个夹板相互靠近或远离,从而达到夹取注塑件的目的。
2、上述注塑机取件机械手用夹具存在的不足之处在于:抓取工件的稳定性较差,且通常只能抓取一些规则而表面平整的工件。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种注塑机取件机械手用夹具及机械手,以达到提高抓取稳定性以及多样性的目的。
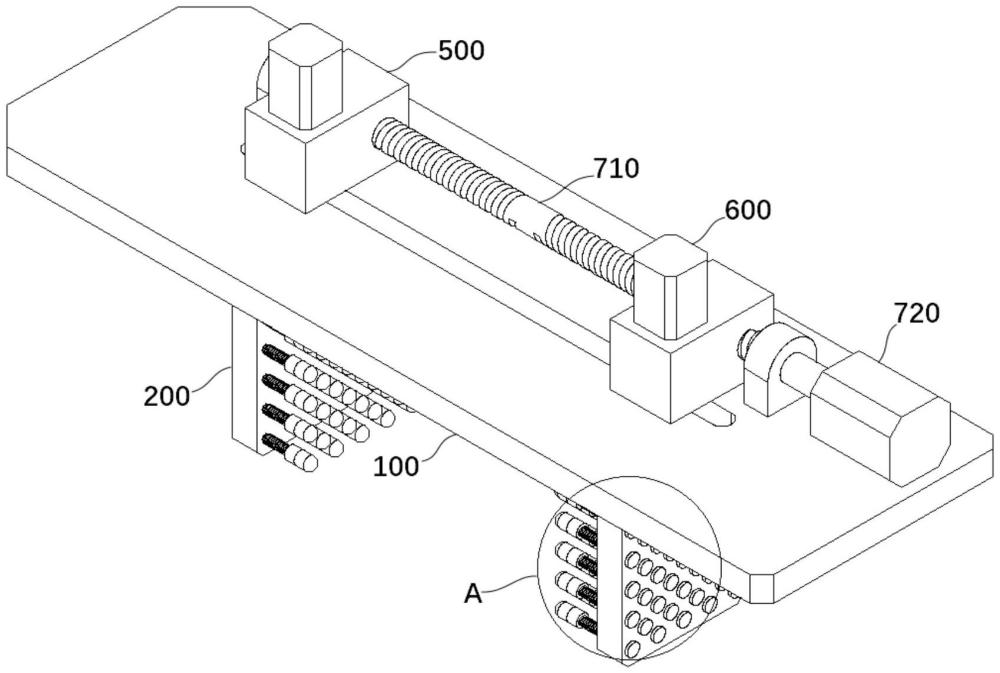
2、为了实现上述目的,一方面,本实用新型提供一种注塑机取件机械手用夹具,包括安装架以及设置在所述安装架上的两个夹取板以及设置在所述安装架上并用于驱动两个夹取板相互靠近或远离的第一驱动组件,还包括:
3、分别与两个所述夹取板相对应的两组夹取杆,每组夹取杆的数量为多个,每组中的多个所述夹取杆呈陈列分布在所述夹取板上并与所述夹取板滑动连接;以及
4、与所述夹取杆一一对应的弹性件,其两端分别与所述夹取杆和所述夹取板连接,且自然状态下,其具有使所述夹取杆向远离所述夹取板的方向运动的趋势。
5、进一步地,还包括:
6、滑块,其设置有两个,两个所述滑块均与所述安装架滑动连接,且两个所述滑块可沿相互靠近或远离的方向在第一工作位置b和第二工作位置b之间作往复直线运动,两个所述夹取板分别与两个所述滑块转动连接并可随着两个所述滑块一起在所述第一工作位置b和所述第二工作位置b之间作往复直线运动,所述第一驱动组件的动力输出端与两个所述滑块传动连接,所述第一驱动组件用于驱动两个所述滑块相互靠近或远离;以及
7、第二驱动组件,其设置有两个,两个所述第二驱动组件分别设置在两个所述滑块上,两个所述第二驱动组件的动力输出端分别与两个所述夹取板传动连接,所述第二驱动组件用于驱动所述夹取板在预设角度α范围内往复转动,其中,α=180°。
8、进一步地,所述第二驱动组件包括第二电机,所述第二电机固定设置在所述滑块上,所述第二电机的动力输出轴与所述夹取板传动连接。
9、进一步地,所述夹取杆包括:
10、杆体,其与所述夹取板滑动连接;以及
11、夹取头,其设置在所述杆体的远离所述夹取板的一端并与所述杆体通过螺纹连接。
12、进一步地,所述夹取头包括:
13、连接座,其与所述杆体螺纹连接;以及
14、与所述连接座通过球副结构连接的吸盘。
15、进一步地,所述夹取头的远离所述夹取杆的一端呈半球形。
16、进一步地,所述第一驱动组件包括:
17、螺杆,其与所述安装架转动连接,其上设置有两个螺距相同但螺旋方向相反的外螺纹段,其通过两个所述外螺纹段分别与两个所述滑块螺纹连接;以及
18、第一电机,其固定设置在所述安装架上,其动力输出轴与所述螺杆传动连接,其用于驱动所述螺杆转动。
19、另一方面,本实用新型还提供一种机械手,包括上述任意一项所述的夹具。
20、本实用新型的有益效果:
21、本实用新型所提供的注塑机取件机械手用夹具及机械手,结构简单,设计合理,通过在夹取板上设置多个夹取杆,多个夹取杆可以因注塑工件的形状而移动不同的距离,从而提高了夹取的稳定性,且可以适应多种形状的注塑工件,提高了夹取的多样性。
技术特征:
1.一种注塑机取件机械手用夹具,包括安装架、设置在所述安装架上的两个夹取板以及设置在所述安装架上并用于驱动两个夹取板相互靠近或远离的第一驱动组件,其特征在于:还包括:
2.根据权利要求1所述的注塑机取件机械手用夹具,其特征在于:还包括:
3.根据权利要求2所述的注塑机取件机械手用夹具,其特征在于:所述第二驱动组件包括第二电机,所述第二电机固定设置在所述滑块上,所述第二电机的动力输出轴与所述夹取板传动连接。
4.根据权利要求1-3任意一项所述的注塑机取件机械手用夹具,其特征在于:所述夹取杆包括:
5.根据权利要求4所述的注塑机取件机械手用夹具,其特征在于:所述夹取头包括:
6.根据权利要求4所述的注塑机取件机械手用夹具,其特征在于:所述夹取头的远离所述夹取杆的一端呈半球形。
7.根据权利要求2或3所述的注塑机取件机械手用夹具,其特征在于:所述第一驱动组件包括:
8.一种机械手,其特征在于:包括权利要求1-7任意一项所述的夹具。
技术总结
本技术属于注塑件抓取设备技术领域,提供了一种注塑机取件机械手用夹具及机械手,上述夹具包括安装架、设置在安装架上的两个夹取板以及设置在安装架上并用于驱动两个夹取板相互靠近或远离的第一驱动组件,还包括:分别与两个夹取板相对应的两组夹取杆,每组夹取杆的数量为多个,每组中的多个夹取杆呈陈列分布在夹取板上并与夹取板滑动连接;以及与夹取杆一一对应的弹性件,其两端分别与夹取杆和夹取板连接,且自然状态下,其具有使夹取杆向远离夹取板的方向运动的趋势。本技术所提供的注塑机取件机械手用夹具及机械手,结构简单,设计合理,抓取稳定性较高,抓取多样性较广。
技术研发人员:贺兰玉
受保护的技术使用者:重庆安汇盛科技有限公司
技术研发日:20230928
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!