一种弧形旋转缠绕机械手的制作方法
本发明涉及纤维缠绕,特别是一种弧形旋转缠绕机械手。
背景技术:
1、纤维缠绕技术是指将浸渍过树脂的连续纤维或布带按照设定的轨迹缠绕至芯模表面,然后固化脱模,成为增强塑料制品的工艺过程。纤维缠绕工艺具有成型效率高、材料利用充分、生产成本低、产品质量一致性好等优点,成为纤维增强回转壳体成型的首选工艺,也是目前生产复合材料的重要工艺和技术。
2、目前,传统的缠绕机构采用直线平移的机械手,通过往复运动和多轴控制联动,完成压力容器的纤维缠绕工作,该种缠绕方式存在诸多缺陷:首先,传统的缠绕机采用直线往复平移机械手,它的结构非常复杂,而且要通过多轴来联动,因此系统的故障率较高,重复精度难以保障,其次,直线往复平移机械手只能够缠绕一个角度,缠绕一个角度以后再来缠绕另一个角度,就导致了不同的角度之间就形成了层与层之间的关系,那么层与层之间相对的滑动,就会导致整个系统的摩擦和滑动导致张力崩溃,这就成为了它在使用上质量很难提高的原因,且直线往复平移机械手由多轴组成,所以非常大的张力都会应用在悬挑轴上因而无法应对大直径的缠绕,因为大直径的缠绕过程中悬挑机械手会因为张力过大变形,对此,我们提出一种弧形旋转缠绕机械手。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述和/或现有技术中所存在的问题,提出了本发明。
3、因此,为解决上述技术问题,本发明提供如下技术方案:一种弧形旋转缠绕机械手,包括安装模块和缠绕模块,其中:
4、安装模块包括底板,所述底板的外侧固定安装有安装架,所述底板顶端的中心处开设有安装槽,且安装槽内卡接有安装座,所述安装座的顶端固定连接有安装杆;以及,
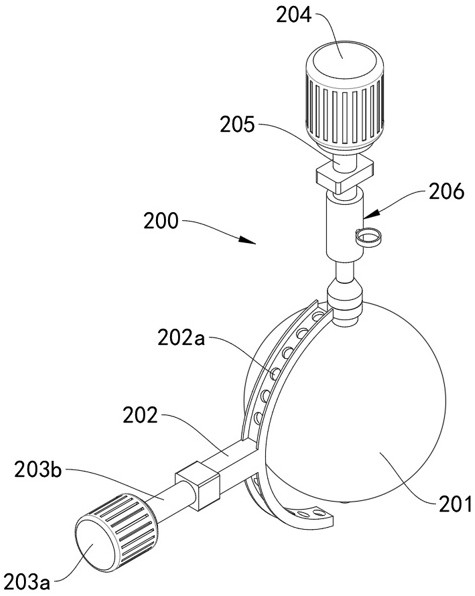
5、缠绕模块包括转动连接在所述安装杆顶端的缠绕球,所述缠绕球的左侧设置有缠绕环,所述缠绕环的左端传动连接有转动组件,且转动组件安装在所述安装架的左侧壁上,所述安装架的顶端固定安装有伺服电机,所述伺服电机的输出端通过联轴器传动连接有第一转轴,所述第一转轴的底端贯穿所述安装架的顶壁并延伸至其下方固定连接有连接组件。
6、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述缠绕环的上下两侧均开设有吐丝口,且每侧所述缠绕环的吐丝口均开设有个。
7、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述转动组件包括固定安装在所述安装架左侧外壁上的转动电机,所述转动电机的输出端通过联轴器传动连接有第二转轴,所述第二转轴的右端贯穿所述安装架的侧壁并延伸至其右端与所述缠绕环的左侧壁固定连接。
8、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述连接组件包括固定连接在所述第一转轴底端的连接套,所述连接套的内部开设有伸缩槽,所述伸缩槽的内顶壁固定连接有伸缩弹簧,所述伸缩弹簧的底端固定连接有伸缩块,所述伸缩块的底端固定连接有连接轴,所述连接轴的底端贯穿所述连接套的内底壁并延伸至其下方。
9、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述连接轴的底端开设有十字卡槽,所述缠绕球的顶端固定连接有连接块,且所述连接块的顶端固定安装有与所述十字卡槽相匹配的十字卡块,所述连接轴的底端贴合在所述连接块的顶端,且所述十字卡块插接在所述十字卡槽内。
10、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述伸缩槽的左右两侧对称开设有限位槽,所述伸缩块的左右两侧对称安装有与所述限位槽相适配的限位块,且两个所述限位块滑动连接在两个所述限位槽内。
11、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:所述伸缩槽的前端设置有拉伸腔,所述拉伸腔内部的左右两侧对称安装有定位销,且两个所述定位销的后端贯穿所述拉伸腔的后壁并分别延伸至两个所述限位槽内,两个所述定位销的前端固定连接有拉伸环,所述拉伸环的前端固定连接有拉伸杆,且拉伸杆的前端贯穿所述连接套的内壁并延伸至其外部固定连接有拉环,所述拉伸杆的外表面套接有复位弹簧,所述复位弹簧的后端与所述拉伸环的前端固定连接,且复位弹簧的前端与所述拉伸腔的前壁固定连接。
12、作为本发明所述弧形旋转缠绕机械手的一种优选方案,其中:两个所述限位块的中部开设有与所述定位销相匹配的定位槽,所述限位块的顶端开设有导向斜面,两个所述定位销的插接端与两个所述限位槽的内壁之间存在一定间隙。
13、本发明的有益效果:将直线往复运动改为了旋转运动,因此能够实现多丝交叉缠绕,而不是单角度单层,因此实现更高的产品品质和这个抗压效果,将多轴平移运动改变成为旋转运动,因此提高了这个缠绕的往复精度,且通过缠绕环上开设的多个吐丝口,可以同时缠绕多纤维,提高缠绕的效率,并缩短缠绕时间。
技术特征:
1.一种弧形旋转缠绕机械手,其特征在于:包括,
2.如权利要求1所述的弧形旋转缠绕机械手,其特征在于:所述缠绕环(202)的上下两侧均开设有吐丝口(202a),且每侧所述缠绕环(202)的吐丝口(202a)均开设有个。
3.如权利要求2所述的弧形旋转缠绕机械手,其特征在于:所述转动组件(203)包括固定安装在所述安装架(102)左侧外壁上的转动电机(203a),所述转动电机(203a)的输出端通过联轴器传动连接有第二转轴(203b),所述第二转轴(203b)的右端贯穿所述安装架(102)的侧壁并延伸至其右端与所述缠绕环(202)的左侧壁固定连接。
4.如权利要求3所述的弧形旋转缠绕机械手,其特征在于:所述连接组件(206)包括固定连接在所述第一转轴(205)底端的连接套(206a),所述连接套(206a)的内部开设有伸缩槽(206b),所述伸缩槽(206b)的内顶壁固定连接有伸缩弹簧(206c),所述伸缩弹簧(206c)的底端固定连接有伸缩块(206d),所述伸缩块(206d)的底端固定连接有连接轴(206e),所述连接轴(206e)的底端贯穿所述连接套(206a)的内底壁并延伸至其下方。
5.如权利要求4所述的弧形旋转缠绕机械手,其特征在于:所述连接轴(206e)的底端开设有十字卡槽(206f),所述缠绕球(201)的顶端固定连接有连接块(207),且所述连接块(207)的顶端固定安装有与所述十字卡槽(206f)相匹配的十字卡块(208),所述连接轴(206e)的底端贴合在所述连接块(207)的顶端,且所述十字卡块(208)插接在所述十字卡槽(206f)内。
6.如权利要求5所述的弧形旋转缠绕机械手,其特征在于:所述伸缩槽(206b)的左右两侧对称开设有限位槽(206g),所述伸缩块(206d)的左右两侧对称安装有与所述限位槽(206g)相适配的限位块(206h),且两个所述限位块(206h)滑动连接在两个所述限位槽(206g)内。
7.如权利要求6所述的弧形旋转缠绕机械手,其特征在于:所述伸缩槽(206b)的前端设置有拉伸腔(206n),所述拉伸腔(206n)内部的左右两侧对称安装有定位销(206i),且两个所述定位销(206i)的后端贯穿所述拉伸腔(206n)的后壁并分别延伸至两个所述限位槽(206g)内,两个所述定位销(206i)的前端固定连接有拉伸环(206j),所述拉伸环(206j)的前端固定连接有拉伸杆(206k),且拉伸杆(206k)的前端贯穿所述连接套(206a)的内壁并延伸至其外部固定连接有拉环(206l),所述拉伸杆(206k)的外表面套接有复位弹簧(206m),所述复位弹簧(206m)的后端与所述拉伸环(206j)的前端固定连接,且复位弹簧(206m)的前端与所述拉伸腔(206n)的前壁固定连接。
8.如权利要求7所述的弧形旋转缠绕机械手,其特征在于:两个所述限位块(206h)的中部开设有与所述定位销(206i)相匹配的定位槽(206o),所述限位块(206h)的顶端开设有导向斜面,两个所述定位销(206i)的插接端与两个所述限位槽(206g)的内壁之间存在一定间隙。
技术总结
本发明公开了一种弧形旋转缠绕机械手,包括安装模块和缠绕模块,其中:安装模块包括底板,所述底板的外侧固定安装有安装架,所述底板顶端的中心处开设有安装槽,且安装槽内卡接有安装座,所述安装座的顶端固定连接有安装杆,缠绕模块包括转动连接在所述安装杆顶端的缠绕球,所述缠绕球的左侧设置有缠绕环,所述缠绕环的左端传动连接有转动组件,将直线往复运动改为了旋转运动,因此能够实现多丝交叉缠绕,而不是单角度单层,因此实现更高的产品品质和这个抗压效果,将多轴平移运动改变成为旋转运动,因此提高了这个缠绕的往复精度,且通过缠绕环上开设的多个吐丝口,可以同时缠绕多纤维,提高缠绕的效率,并缩短缠绕时间。
技术研发人员:陈硕,刘志俊
受保护的技术使用者:江苏扫地僧智能科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!