再热蒸汽温度控制系统的超调抑制器及超调抑制方法与流程
本发明涉及火电机组过程控制,尤其涉及一种再热蒸汽温度控制系统的超调抑制器及超调抑制方法。
背景技术:
1、在火电机组过程控制中,火电机组的再热汽温控制系统通常会采用一种加速型工程最速比例-积分(accelerated engineering fastest proportional-integral,aefpi)控制器。但在再热汽温控制的过程中超调量较大,现有技术主要采用一阶惯性滤波器(first order inertial filter,foif)对超调进行抑制,但是这种技术方案会明显降低再热汽温控制系统的性能。
技术实现思路
1、本发明提供了一种再热蒸汽温度控制系统的超调抑制器及超调抑制方法,以解决现有技术会明显降低再热汽温控制系统的性能技术问题。
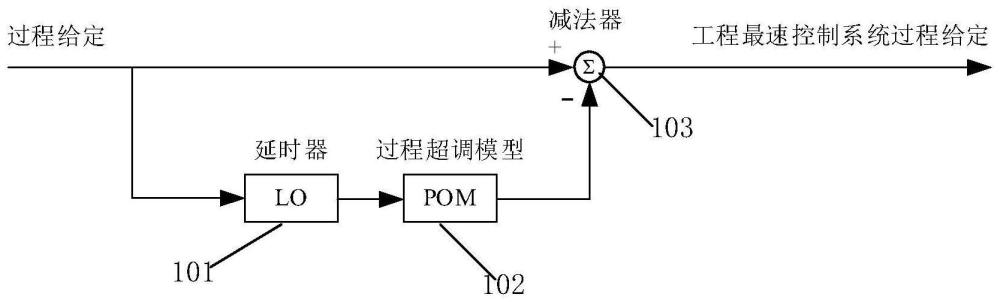
2、为了解决上述技术问题,本发明实施例提供了一种再热蒸汽温度控制系统的超调抑制器,包括延时器、过程超调模型和减法器;其中,
3、所述延时器用于将所述再热蒸汽温度控制系统的过程给定信号进行延时处理,获得延时信号;并将所述延时信号输入至所述过程超调模型;
4、所述过程超调模型用于对所述延时信号进行信号处理,获得超调信号;并将所述超调信号输入至所述减法器的减数端;
5、所述减法器通过被减数端获取所述过程给定信号,基于所述过程给定信号以及所述超调信号进行减法处理,获得过程给定修正信号。
6、作为优选方案,所述过程超调模型包括:
7、
8、td=te-ts;
9、pvd1=pv1-pvsu;
10、pvd2=pv2-pv1;
11、pvd3=pv3-pv2;
12、pvd4=pv4-pv3;
13、pvd5=pv5-pv4;
14、pvd6=pv6-pv5;
15、pvd7=pv7-pv6;
16、pvd8=pvd1+pvd2+pvd3+pvd4+pvd5+pvd6+pvd7;
17、其中,fpom(s)为过程超调模型的拉普拉斯传递函数,s为拉普拉斯算子,vsu为所述过程给定信号的幅值,ts为过程输出上升至所述幅值的时间,te为过程输出从峰值下降到所述幅值的时间,td为te减ts的差值且用于简化运算,toie为td的八分之一数的整数部分,pv1为过程输出在ts+1*toie时刻的过程值,pv2为过程输出在ts+2*toie时刻的过程值,pv3为过程输出在ts+3*toie时刻的过程值,pv4为过程输出在ts+4*toie时刻的过程值,pv5为过程输出在ts+5*toie时刻的过程值,pv6为过程输出在ts+6*toie时刻的过程值,pv7为过程输出在ts+7*toie时刻的过程值,pvd1、pvd2、pvd3、pvd4、pvd5、pvd6和pvd7为中间变量且用于简化运算,pvd8为pvd1、pvd2、pvd3、pvd4、pvd5、pvd6和pvd7的和。
18、作为优选方案,所述延时器包括:
19、flo(s)=e-τs;
20、其中,flo(s)为延时器的拉普拉斯传递函数;τ为延时器的时间常数。
21、作为优选方案,所述获得过程给定修正信号,具体为:
22、fefcspos(s)=1-flo(s)fpom(s);
23、其中,fefcspos(s)为所述超调抑制器的拉普拉斯传递函数。
24、相应的,本发明实施例还提供了一种再热蒸汽温度控制系统的超调抑制方法,包括:
25、获取所述再热蒸汽温度控制系统的过程给定信号,并将所述过程给定信号输入至延时器中;
26、通过所述延时器对所述过程给定信号进行延时处理,获得延时信号,并将所述延时信号输入至所述过程超调模型;
27、通过所述过程超调模型对所述延时信号进行信号处理,获得超调信号;并将所述超调信号输入至所述减法器的减数端;
28、将所述过程给定信号输入所述减法器的被减数端,通过所述减法器,基于所述过程给定信号以及所述超调信号进行减法处理,获得过程给定修正信号。
29、作为优选方案,所述过程超调模型包括:
30、
31、td=te-ts;
32、pvd1=pv1-pvsu;
33、pvd2=pv2-pv1;
34、pvd3=pv3-pv2;
35、pvd4=pv4-pv3;
36、pvd5=pv5-pv4;
37、pvd6=pv6-pv5;
38、pvd7=pv7-pv6;
39、pvd8=pvd1+pvd2+pvd3+pvd4+pvd5+pvd6+pvd7;
40、其中,fpom(s)为过程超调模型的拉普拉斯传递函数,s为拉普拉斯算子,vsu为所述过程给定信号的幅值,ts为过程输出上升至所述幅值的时间,te为过程输出从峰值下降到所述幅值的时间,td为te减ts的差值且用于简化运算,toie为td的八分之一数的整数部分,pv1为过程输出在ts+1*toie时刻的过程值,pv2为过程输出在ts+2*toie时刻的过程值,pv3为过程输出在ts+3*toie时刻的过程值,pv4为过程输出在ts+4*toie时刻的过程值,pv5为过程输出在ts+5*toie时刻的过程值,pv6为过程输出在ts+6*toie时刻的过程值,pv7为过程输出在ts+7*toie时刻的过程值,pvd1、pvd2、pvd3、pvd4、pvd5、pvd6和pvd7为中间变量且用于简化运算,pvd8为pvd1、pvd2、pvd3、pvd4、pvd5、pvd6和pvd7的和。
41、作为优选方案,所述延时器包括:
42、flo(s)=e-τs;
43、其中,flo(s)为延时器的拉普拉斯传递函数;τ为延时器的时间常数。
44、作为优选方案,所述获得过程给定修正信号,具体为:
45、fefcspos(s)=1-flo(s)fpom(s);
46、其中,fefcspos(s)为所述超调抑制器的拉普拉斯传递函数。
47、相应的,本发明实施例还提供了一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现所述的再热蒸汽温度控制系统的超调抑制方法。
48、相应的,本发明实施例还提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行所述的再热蒸汽温度控制系统的超调抑制方法。
49、相比于现有技术,本发明实施例具有如下有益效果:
50、本发明实施例提供了一种再热蒸汽温度控制系统的超调抑制器及超调抑制方法,所述超调抑制器包括延时器、过程超调模型和减法器;其中,所述延时器用于将所述再热蒸汽温度控制系统的过程给定信号进行延时处理,获得延时信号;并将所述延时信号输入至所述过程超调模型;所述过程超调模型用于对所述延时信号进行信号处理,获得超调信号;并将所述超调信号输入至所述减法器的减数端;所述减法器通过被减数端获取所述过程给定信号,基于所述过程给定信号以及所述超调信号进行减法处理,获得过程给定修正信号。相比现有技术,对过程给定信号进行延时处理,并通过过程超调模型进行信号处理,实现对再热蒸汽温度控制系统的过程给定信号的超调抑制,调节其超调量,以提高再热蒸汽温度控制过程的稳定性和响应速度,提高控制系统的性能。
- 还没有人留言评论。精彩留言会获得点赞!