温度检测装置以及具备该温度检测装置的空调机的室内机的制作方法
1.本公开涉及具有构成为转动自如的温度检测部的温度检测装置、以及具备该温度检测装置的空调机的室内机。
背景技术:
2.以往,作为空调机的室内机,例如存在天花板嵌入型的室内机。在这种室内机中,设置有具备例如对人体、墙壁或地板等的红外线量进行检测的红外线传感器的温度检测装置。为了进一步提高使用者的舒适性,考虑在空调机的室内机中使用搭载有凭借高像素的高灵敏度的红外线传感器的温度检测装置。但是,凭借高像素的高灵敏度的红外线传感器存在传感器自身发热的情况,因而担心温度检测的精度因该发热的影响而降低。因此,考虑有基于传感器自身发热的温度对对象空间的温度进行修正的方法。
3.例如,在专利文献1公开的空调机中,具备红外线传感器、覆盖红外线传感器的前方的片材、设于片材的附近的修正用温度测定部、和对来自红外线传感器的输出进行运算的控制部。红外线传感器能够转动至检测修正用温度测定部的温度的位置。在专利文献1的空调机中,通过用片材覆盖红外线传感器,改善了外观。另一方面,由于用片材覆盖的红外线传感器检测片材自身的温度,所以无法高精度地检测空调对象空间的温度。因此,控制部基于红外线传感器检测出的修正用温度测定部的温度,对红外线传感器经由片材检测出的温度进行修正。
4.专利文献1:日本特开2017-44439号公报
5.然而,在专利文献1公开的空调机中,在位于片材的附近的红外线传感器的转动范围,设置有修正用温度测定部。因此,该空调机未形成为能够使红外线传感器旋转360
°
来对对象空间的温度进行检测的结构。即,对于该空调机,无法适用于例如像天花板嵌入型的室内机那样使传感器旋转360
°
来检测人体、墙壁或地板等的温度的结构。
技术实现要素:
6.本公开是为了解决如上述那样的课题而完成的,其目的在于提供能够使传感器旋转360
°
来检测对象空间的温度、且即便使用凭借高像素的高灵敏度的红外线传感器也能提高温度检测精度的温度检测装置以及具备该温度检测装置的空调机的室内机。
7.本公开的温度检测装置具备:框架,其形成外廓;温度检测部,其在上述框架的内部被保持为能够转动;驱动部,其驱动上述温度检测部而使其旋转;旋转控制部,其控制上述温度检测部的旋转;以及控制部,其对上述温度检测部检测出的温度进行修正,上述温度检测部具有:传感器,其检测温度;传感器帽,其将上述传感器保持于内部;以及传感器壳体,其具有使上述传感器向外部露出的开口部,并将上述传感器帽保持为能够转动,上述旋转控制部构成为:在上述温度检测部从基准位置起旋转360
°
的范围内,以使上述传感器从上述传感器壳体的上述开口部露出的状态,使上述传感器帽与上述传感器壳体同步地旋转,若上述温度检测部从基准位置起旋转至超过360
°
的目标角度,则使上述传感器帽的旋
转停止,并通过上述驱动部使上述传感器壳体旋转,由此上述传感器的位置从上述开口部偏离,从而在上述传感器壳体的内部遮挡上述传感器,上述控制部构成为:基于上述传感器以在上述传感器壳体的内部被遮挡的状态检测出的温度,对上述传感器在从上述开口部露出时检测出的温度进行修正。
8.本公开的空调机的室内机具备:壳体,其形成外廓;送风机,其收纳于上述壳体的内部,将空调对象空间的空气从吸入口吸入至壳体内,并从排出口排出;热交换器,其收纳于上述壳体的内部,使在内部流动的制冷剂与被吸入至上述壳体内的空气进行热交换;以及上述温度检测装置。
9.根据本公开的温度检测装置以及具备该温度检测装置的空调机的室内机,在温度检测部从基准位置起旋转360
°
的范围内,以使传感器从传感器壳体的开口部露出的状态,使传感器帽与传感器壳体同步地旋转,因此能够使传感器旋转360
°
来检测对象空间的温度。另外,若温度检测部旋转至超过360
°
的目标角度,则使传感器帽的旋转停止,并使传感器壳体旋转,由此传感器的位置从开口部偏离,从而传感器在传感器壳体的内部被遮挡。控制部基于传感器以在传感器壳体被遮挡的状态下检测出的传感器自身的发热温度,对传感器在从开口部露出时检测出的温度进行修正,因此能够不受传感器自身的发热温度的影响,从而能够提高温度检测精度。
附图说明
10.图1是分解表示本实施方式的空调机的室内机的立体图。
11.图2是本实施方式的空调机的室内机的内部结构图。
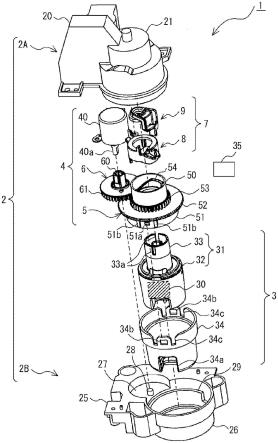
12.图3是分解表示本实施方式中的温度检测装置的立体图。
13.图4是表示本实施方式中的组装有温度检测装置的状态的立体图。
14.图5是表示本实施方式中的温度检测装置的上框架的仰视图。
15.图6是表示本实施方式中的温度检测装置的传感器帽的立体图。
16.图7是从上表面侧示出本实施方式中的温度检测装置的传感器壳体的立体图。
17.图8是表示本实施方式中的温度检测装置的驱动齿轮部的立体图。
18.图9是表示本实施方式中的温度检测装置的升降环的立体图。
19.图10是表示本实施方式中的温度检测装置的旋转式键的立体图。
20.图11是本实施方式中的温度检测装置的控制部的框图。
21.图12是用于指示图12~图30的各图的剖面的说明图。
22.图13是温度检测部的旋转角度为0
°
时的图12所示的a-a向视剖视图。
23.图14是温度检测部的旋转角度为0
°
时的图12所示的b-b向视剖视图。
24.图15是温度检测部的旋转角度为0
°
时的图12所示的c-c向视剖视图。
25.图16是图15所示的e部的说明图。
26.图17是温度检测部的旋转角度为0
°
时的图12所示的d向视图。
27.图18是温度检测部的旋转角度为335
°
时的图12所示的b-b向视剖视图。
28.图19是温度检测部的旋转角度为335
°
时的图12所示的d向视图。
29.图20是温度检测部的旋转角度为360
°
时的图12所示的b-b向视剖视图。
30.图21是温度检测部的旋转角度为360
°
时的图12所示的a-a向视剖视图。
31.图22是温度检测部的旋转角度为360
°
时的图12所示的d向视图。
32.图23是温度检测部的旋转角度为420
°
时的图12所示的b-b向视剖视图。
33.图24是温度检测部的旋转角度为420
°
时的图12所示的a-a向视剖视图。
34.图25是温度检测部的旋转角度为420
°
时的图12所示的c-c向视剖视图。
35.图26是图25所示的f部的说明图。
36.图27是温度检测部的旋转角度为420
°
时的图12所示的d向视图。
37.图28是温度检测部的旋转角度为495
°
时的图12所示的c-c向视剖视图。
38.图29是图28所示的g部的说明图。
39.图30是温度检测部的旋转角度为495
°
时的图12所示的d向视图。
具体实施方式
40.以下,参照附图对本公开的实施方式进行说明。此外,在各图中,对相同或相当的部分标注相同的附图标记,并适当省略或简化其说明。另外,针对在各图中记载的结构,其形状、大小及配置等能够适当变更。
41.实施方式.
42.图1是分解表示本实施方式的空调机的室内机的立体图。图2是本实施方式的空调机的室内机的内部结构图。
43.本实施方式的空调机的室内机100通过制冷剂配管与室外机连接,从而与室外机一起构成使制冷剂在制冷剂回路中循环来进行冷冻、空气调节等的空调机。此外,本实施方式的空调机的室内机100是天花板嵌入型的室内机,以下,作为其一例,对四方向盒式室内机进行说明。
44.如图1及图2所示,本实施方式的空调机的室内机100是在形成外廓的壳体10的内部收容有例如室内送风机11、室内热交换器12、排水盘13、送风机驱动用马达14、喇叭口15等的结构。
45.壳体10为大致长方体形状的箱型,设置于在空调室内的天花板形成的开口内部。壳体10的下表面具有在中央部形成的矩形的第1开口部10a、和沿该第1开口部10a的各边形成的4个第2开口部10b。
46.在壳体10的下表面以遮蔽壳体10的方式安装有装饰面板16。装饰面板16由四边形的板体构成,在中央部分形成有吸入空调室内的空气的吸入口。吸入口以对应于壳体10的第1开口部10a的方式形成,并由吸入格栅17覆盖。另外,在装饰面板16中,将通过了室内热交换器12的空气向室内排出的细长的长方形的排出口16a以沿着装饰面板16的各边的方式形成在吸入口的周围。各排出口16a以对应于壳体10的各第2开口部10b的方式形成,并设置有风向调整叶片。
47.在装饰面板16的各角部,以能够装卸的方式设置有罩部件18。罩部件18是为了进行装饰面板16的装卸或调整而设置的。在4个罩部件18中的1个罩部件18设置有例如对人体、墙壁或地板等的温度进行检测的温度检测装置1。
48.接下来,基于图3~图11对温度检测装置1的结构详细进行说明。图3是分解表示本实施方式中的温度检测装置的立体图。图4是表示本实施方式中的组装有温度检测装置的状态的立体图。图5是表示本实施方式中的温度检测装置的上框架的仰视图。图6是表示本
实施方式中的温度检测装置的传感器帽的立体图。图7是从上表面侧示出本实施方式中的温度检测装置的传感器壳体的立体图。图8是表示本实施方式中的温度检测装置的驱动齿轮部的立体图。图9是表示本实施方式中的温度检测装置的升降环的立体图。图10是表示本实施方式中的温度检测装置的旋转式键的立体图。图11是本实施方式中的温度检测装置的控制部的框图。
49.温度检测装置1具有框架2、温度检测部3、驱动部4和旋转控制部7。如图3及图4所示,框架2形成温度检测装置1的外廓。在框架2的内部收容有温度检测部3、驱动部4和旋转控制部7。框架2具有上框架2a和下框架2b。上框架2a和下框架2b通过螺钉等接合部件2a接合。此外,上框架2a和下框架2b例如也可以是在它们中的一方设置爪部、在另一方设置与爪部卡合的孔部来进行接合的构造。
50.如图3及图4所示,上框架2a具有上部收容部20和圆筒状的上部套筒21。在上部收容部20主要收容有驱动部4的马达部40。
51.上部套筒21是下表面开口、上表面封闭的结构。上部套筒21形成为上部的直径比下部的直径小,在上部与下部之间设置有台阶部21a。在上部套筒21的内部,在台阶部21a设置有向上方突出的槽状的升降引导部24。升降引导部24在周向隔开间隔地设置有2个。
52.如图5所示,在上部套筒21的内部设置有从上表面的中心朝向轴向突出的键轴部22。另外,在上部套筒21的内部设置有从上部的侧面向径向突出的旋转限位器23。旋转限位器23在周向例如隔开135度左右的间隔而设置有2个。
53.如图3及图4所示,下框架2b具有下部收容部25和圆筒状的下部套筒26。下部收容部25以与上框架2a的上部收容部20对置的方式设置。在下部收容部25设置有用于载置驱动部4的驱动齿轮部6的座面部27。在座面部27的中心设置有突起部28。
54.另外,下部套筒26以与上框架2a的上部套筒21对置的方式设置。下部套筒26的上表面及下表面开口。另外,在下部套筒26的内周面设置有用于载置驱动部4的凸缘部52的台阶部29。框架2以使温度检测部3从下框架2b的下端向外部露出的状态,收容有温度检测部3、驱动部4、升降环8和旋转式键9。
55.如图3所示,温度检测部3具有传感器30、传感器帽31和传感器壳体34。传感器30检测室内温度。传感器30具有搭载有红外线传感器的传感器基板、和保持传感器基板的基板支架。传感器基板的精度高且像素高,传感器自身发热,并感知自身发热。传感器30以传感器基板相对于铅垂方向而朝向下方倾斜的状态收容于传感器帽31的内部。
56.如图3及图6所示,传感器帽31收容并保持传感器30。传感器帽31具有圆筒状的下部帽32和直径比下部帽32小的圆筒状的上部帽33。
57.下部帽32是下表面封闭、上表面开口的结构。在下部帽32收容有传感器30的传感器基板。如图6所示,在下部帽32的下部形成有通向内部的孔部32a。孔部32a是为了使收容于传感器帽31的内部的传感器30的传感器基板向外部露出而形成的。即,传感器30以传感器基板位于孔部32a的方式收容于传感器帽31的内部。另外,在下部帽32的下表面设置有向下方突出的突起部32b。
58.上部帽33的上表面及下表面开口。上部帽33与下部帽32在筒内部连通。如图3及图6所示,在上部帽33的上端部形成有一对狭缝部33a。一对狭缝部33a形成为在径向上对置。
59.如图3及图7所示,传感器壳体34为直径比下部帽32大的圆筒状,覆盖下部帽32的
周围。传感器壳体34是下表面封闭、上表面开口的结构。在传感器壳体34的筒内部收容有在内部具备传感器30的下部帽32。在传感器壳体34的下部形成有用于使传感器30的传感器基板向外部露出的开口部34a。下部帽32以孔部32a位于传感器壳体34的开口部34a的方式收容于传感器壳体34的内部。
60.另外,在传感器壳体34的上端缘设置有用于与固定齿轮部5卡合的卡合孔34b及卡合狭缝34c。卡合孔34b在径向上对置地设置有2个。卡合狭缝34c形成于传感器壳体34在周向上的各卡合孔34b的两侧。另外,在传感器壳体34的内底面设置有供设置于下部帽32的下表面的突起部32b嵌入的突起承接部34d。
61.驱动部4驱动温度检测部3而使其旋转。如图3所示,驱动部4配置于传感器壳体34的上部。驱动部4具有固定齿轮部5、驱动齿轮部6和马达部40。
62.如图3所示,固定齿轮部5具有上部筒体50、下部筒体51和圆环状的凸缘部52。上部筒体50和下部筒体51在筒内部连通。凸缘部52设于上部筒体50的下端部与下部筒体51的上端部之间。在上部筒体50及下部筒体51的筒内部插入有传感器帽31的上部。固定齿轮部5的凸缘部52载置于下框架2b的台阶部29而支承于下框架2b。
63.如图3所示,在上部筒体50的外周面设置有第1正齿轮53。另外,在上部筒体50的内周面,朝向轴芯突出的壁状的第1卡合部54在径向上对置地设置有2个。第1卡合部54例如形成为梯形或平行四边形,上端缘沿周向朝上方或下方倾斜。
64.在下部筒体51设置有与形成在传感器壳体34的卡合孔34b卡合的爪部51a、和与形成在传感器壳体34的卡合狭缝34c卡合的纵长的线状突起部51b。下部筒体51嵌入传感器壳体34的内部,通过爪部51a与卡合孔34b卡合,线状突起部51b与卡合狭缝34c卡合,从而被安装于传感器壳体34。
65.如图3及图8所示,驱动齿轮部6具有中空轴部60和设于中空轴部60的外周的第2正齿轮61。驱动齿轮部6设置于下框架2b的座面部27。中空轴部60的上部为马达轴承部60a,下部为设于下框架2b的座面部27的突起部28的突起承接部60b。马达轴承部60a的横截面形状为矩形。在马达轴承部60a插入有马达部40的马达轴40a。突起承接部60b的横截面形状为圆形。下框架2b的突起部28以能够绕轴旋转的方式插入至突起承接部60b。
66.第2正齿轮61设置在中空轴部60的突起承接部60b的外周。第2正齿轮61与固定齿轮部5的第1正齿轮53啮合。
67.马达部40收容于上框架2a的上部收容部20,通过螺钉等接合部件固定于上部收容部20。马达部40配置为马达轴40a朝向下方。马达轴40a被插入驱动齿轮部6的马达轴承部60a。若驱动部4的马达部40进行驱动,则马达部40的旋转力经由驱动齿轮部6向固定齿轮部5传递,从而使安装在固定齿轮部5的温度检测部3旋转。
68.如图3所示,旋转控制部7具有升降环8和旋转式键9。旋转控制部7是为了控制温度检测部3的旋转而设置的。具体而言,旋转控制部7在温度检测部3从基准位置起旋转360
°
的范围内,以使传感器30从传感器壳体34的开口部34a露出的状态,使传感器帽31与传感器壳体34同步地旋转。另外,若温度检测部3从基准位置起旋转至超过360
°
的目标角度,则旋转控制部7停止传感器帽31的旋转,并通过驱动部4使传感器壳体34旋转,由此传感器30的位置从开口部34a偏离,从而在传感器壳体34的内部遮挡传感器30。
69.如图3所示,升降环8与驱动部4卡合而与驱动部4一同旋转,并且若温度检测部3从
基准位置起旋转至超过360
°
的目标角度,则升降环8相对于驱动部4上升。具体而言,升降环8被嵌入至固定齿轮部5的上部筒体50的筒内部。如图9所示,在升降环8的上端缘设置有朝向轴芯突出的圆环状的凸缘部80。若升降环8被嵌入至上部筒体50的筒内部,则凸缘部80与上部帽33的上端缘抵接,由此支承于该上部帽33。
70.另外,如图9所示,在升降环8的外表面设置有向上方突出的l字状的升降限位器81。升降限位器81在升降环8的径向上对置地设置有2个。在升降环8相对于驱动部4上升之后,升降限位器81被嵌入设于上框架2a的升降引导部24,该上升停止。
71.另外,如图9所示,在升降环8的内表面设置有与上部帽33的狭缝部33a卡合的纵长的肋82。肋82在升降环8的径向上对置地设置有2个。升降环8通过肋82与狭缝部33a卡合而与该上部帽33卡合。若升降环8相对于驱动部4上升,则肋82与狭缝部33a的卡合状态被解除。此外,肋82与狭缝部33a卡合的长度比升降环8上升的幅度尺寸小。
72.另外,如图9所示,在升降环8的上端部设置有向上方突出的凸状的旋转限位器83。升降环8的旋转限位器83被旋转式键9限制从而旋转停止。此外,旋转限位器83与一方的肋82形成为一体。
73.另外,如图9所示,在升降环8的下端缘形成有第2卡合部84,该第2卡合部84在该升降环8被嵌入至固定齿轮部5的上部筒体50的状态下与第1卡合部54卡合。第2卡合部84在径向上对置地设置有2个。第2卡合部84形成为与固定齿轮部5的第1卡合部54成为相同的倾斜方向及倾斜角度。
74.在温度检测部3从基准位置起旋转360
°
的范围内,第2卡合部84与第1卡合部54卡合的状态被维持,升降环8与固定齿轮部5的旋转同步地进行旋转。另一方面,若温度检测部3从基准位置起旋转至超过360
°
的目标角度,则升降环8的旋转限位器83被旋转式键9限制从而旋转停止。若在该状态下固定齿轮部5旋转,则第1卡合部54相对于第2卡合部84滑动而使升降环8上升。若升降环8上升,则第2卡合部84与第1卡合部54的卡合状态被解除,且肋82与狭缝部33a的卡合状态被解除。升降环8的上升因升降限位器81被嵌入至升降引导部24而被限制。即,通过固定齿轮部5向升降环8施加的旋转力在旋转至目标角度之后被变换为使升降环8向上方位移的应力。
75.另外,在升降环8的下端缘,与第2卡合部84一起而设置有旋转限制突起85。旋转限制突起85以从升降环8的下端缘向下方突出的方式设置。旋转限制突起85在升降环8的上升停止之后,与第1卡合部54相抵来限制固定齿轮部5的旋转。
76.旋转式键9限制升降环8的旋转。如图3及图10所示,旋转式键9在侧面观察下为大致l字状。旋转式键9在l字的水平面部设置有键轴承90,在l字的垂直面部设置有键壁面部91。设置在上框架2a的键轴部22被插入键轴承90。键壁面部91形成为朝向内侧凹陷的槽形,周向的两端缘为上限位器91a及91b。
77.旋转式键9通过将键轴部22插入至键轴承90而安装于上框架2a。旋转式键9的键壁面部91配置于限位部件23a与23b之间。旋转式键9在2个限位部件23a与23b之间,以键轴部22为中心转动自如。即,旋转式键9能够从一方的上限位器91a与一方的限位部件23a抵接的位置至另一方的上限位器91b与另一方的限位部件23b抵接的位置进行转动。
78.另外,在键壁面部91的下表面设置有向下方突出的下限位器92。下限位器92和升降环8的旋转限位器83彼此的侧面形成为面接触。即,旋转式键9通过升降环8的旋转限位器
83与下限位器92进行面接触而与升降环8的旋转连动地进行旋转。旋转式键9通过上限位器91a与限位部件23a抵接、或上限位器91b与限位部件23b抵接,来限制升降环8的旋转。
79.控制部35由例如微型计算机或cpu那样的运算装置和在其上执行的软件构成。此外,控制部35也可以由实现其功能的电路设备那样的硬件构成。
80.如图11所示,控制部35具有驱动控制部35a、温度取得部35b和运算部35c。控制部35从驱动控制部35a向马达部40输出控制信号。向马达部40输出的控制信号包含旋转、旋转方向以及旋转停止等。马达部40基于从驱动控制部35a输入的控制信号而被驱动。
81.从传感器30输出的检测结果被输入温度取得部35b。在运算部35c中,基于传感器30的检测结果来运算对象空间的热源的温度。具体而言,运算部35c基于传感器30在被遮挡的状态下检测出的温度,对传感器30在从传感器壳体34的开口部34a露出时检测出的温度进行修正。
82.上述结构的控制部35既可以设于框架2的内部,也可以设于室内机100的壳体10的内部。另外,控制部35也可以设于室内机100的外部。
83.接下来,对本实施方式的温度检测装置1的组装顺序简单地进行说明。首先,将在内部具有传感器30的传感器帽31设置于传感器壳体34。传感器帽31通过从传感器壳体34的上表面的开口被插入,突起部32b被嵌入传感器壳体34的突起承接部34d,而设置于传感器壳体34。而且,在传感器帽31的上部设置固定齿轮部5。固定齿轮部5在筒内部通过传感器帽31的上部,使爪部51a与传感器壳体34的卡合孔34b卡合,使线状突起部51b与传感器壳体34的卡合狭缝34c卡合,从而固定于传感器壳体34。
84.接下来,将与固定齿轮部5连结的传感器壳体34插入下部套筒26的筒内部。固定齿轮部5的凸缘部52载置并支承于台阶部29。
85.接下来,在驱动齿轮部6的马达轴承部60a插入马达部40的马达轴40a。并且,使第2正齿轮61与第1正齿轮53啮合,将突起部28插入突起承接部60b,从而将驱动齿轮部6设置于座面部27。
86.接下来,将升降环8插入上部筒体50的内部。此时,升降环8的第2卡合部84与上部筒体50的第1卡合部54卡合。另外,肋82与上部帽33的狭缝部33a卡合,从而升降环8与传感器帽31连结。然后,在旋转式键9的键轴承90插入上框架2a的键轴部22,从而将旋转式键9与上框架2a连结。最后,通过螺钉、爪等接合方式将上框架2a和下框架2b接合在一起。
87.接下来,对本实施方式的温度检测装置1的温度检测部3的旋转动作进行说明。在以下的说明中,温度检测部3的旋转角度以0
°
为基准位置。在该基准位置,传感器30成为相对于空调对象空间朝向正面的状态。另外,各旋转角度是指传感器30相对于空调对象空间从基准位置绕逆时针旋转了的角度。此外,以下说明的旋转角度是一例,不限定于此。
88.《在温度检测部3的旋转角度为0
°
时》
89.首先,基于图12~图17对温度检测装置1的旋转角度为0
°
时进行说明。图12是用于指示图12~图30的各图的剖面的说明图。图13是温度检测部的旋转角度为0
°
时的图12所示的a-a向视剖视图。图14是温度检测部的旋转角度为0
°
时的图12所示的b-b向视剖视图。图15是温度检测部的旋转角度为0
°
时的图12所示的c-c向视剖视图。图16是图15所示的e部的说明图。图17是温度检测部的旋转角度为0
°
时的图12所示的d向视图。此外,图17所示的剖面线部分x表示传感器30的视角。
90.如图13所示,在温度检测部3的旋转角度为0
°
时,一方的上限位器91a与上框架2a的一方的限位部件23a接触,从而旋转式键9的位置被固定。此时,如图14所示,升降环8的旋转限位器83与旋转式键9的下限位器92的一方的侧面抵接。
91.如图15所示,升降环8的肋82被嵌入上部帽33的狭缝部33a。另外,如图16所示,固定齿轮部5的第1卡合部54与升降环8的第2卡合部84卡合。通过它们的卡合,传感器帽31和传感器壳体34经由升降环8与固定齿轮部5连结。此时,如图17所示,温度检测部3成为如下状态,及:传感器帽31的孔部32a的位置与传感器壳体34的开口部34a的位置一致,传感器30从传感器壳体34的开口部34a完全露出。
92.《在温度检测部3的旋转角度为335
°
时》
93.接下来,基于图18及图19对温度检测装置1从0
°
的状态绕逆时针旋转了335
°
的状态进行说明。图18是温度检测部的旋转角度为335
°
时的图12所示的b-b向视剖视图。图19是温度检测部的旋转角度为335
°
时的图12所示的d向视图。此外,图19所示的剖面线部分x表示传感器30的视角。
94.若温度检测装置1的温度检测部3从0
°
的状态绕逆时针旋转335
°
,则如图18所示那样,升降环8的旋转限位器83与旋转式键9的下限位器92的另一方的侧面抵接。传感器壳体34和传感器帽31经由升降环8与固定齿轮部5连结。因此,如图19所示,传感器帽31的孔部32a与传感器壳体34的开口部34a同步地旋转。即,温度检测部3成为如下状态,即:传感器帽31的孔部32a的位置与传感器壳体34的开口部34a的位置一致,传感器30从传感器壳体34的开口部34a完全露出。
95.《在温度检测部3的旋转角度为360
°
时》
96.接下来,基于图20~图22对温度检测部3绕逆时针旋转至360
°
的状态进行说明。图20是温度检测部的旋转角度为360
°
时的图12所示的b-b向视剖视图。图21是温度检测部的旋转角度为360
°
时的图12所示的a-a向视剖视图。图22是温度检测部的旋转角度为360
°
时的图12所示的d向视图。此外,图22所示的剖面线部分x表示传感器30的视角。
97.若温度检测装置1的温度检测部3从335
°
进一步旋转,则如图20所示那样,下限位器92被旋转限位器83推压,如图21所示那样,旋转式键9以键轴部22为中心绕逆时针旋转。传感器壳体34和传感器帽31经由升降环8与固定齿轮部5连结。因此,如图23所示,传感器帽31的孔部32a和传感器壳体34的开口部34a同步地旋转。即,温度检测部3成为如下状态,即:传感器帽31的孔部32a的位置与传感器壳体34的开口部34a的位置一致,传感器30从传感器壳体34的开口部34a完全露出。
98.《在温度检测部3的旋转角度为420
°
时》
99.接下来,基于图23~图27对温度检测装置1绕逆时针旋转至420
°
的状态进行说明。图23是温度检测部的旋转角度为420
°
时的图12所示的b-b向视剖视图。图24是温度检测部的旋转角度为420
°
时的图12所示的a-a向视剖视图。图25是温度检测部的旋转角度为420
°
时的图12所示的c-c向视剖视图。图26是图25所示的f部的说明图。图27是温度检测部的旋转角度为420
°
时的图12所示的d向视图。此外,图27所示的剖面线部分x表示传感器30的视角。
100.若温度检测装置1的温度检测部3的旋转角度旋转至超过360
°
的目标角度,则如图23所示那样,下限位器92被旋转限位器83推压,如图24所示那样,最终旋转式键9的另一方
的上限位器91b与另一方的限位部件23b相抵,旋转式键9的旋转停止。另外,旋转限位器83通过下限位器92被限制移动,由此升降环8的旋转停止。若在该状态下固定齿轮部5旋转,则如图25及图26所示那样,第1卡合部54相对于第2卡合部84滑动,由此升降环8上升。因升降环8上升,第2卡合部84与第1卡合部54的卡合状态被解除,且肋82与狭缝部33a的卡合状态被解除。由此,传感器帽31的旋转停止。另一方面,固定于固定齿轮部5的传感器壳体34通过驱动部4的驱动而旋转。因此,对于温度检测部3而言,如图27所示,传感器帽31的孔部32a的位置与传感器壳体34的开口部34a的位置偏离,从而传感器30的一部分被传感器壳体34的内部遮挡。
101.《在温度检测部3的旋转角度为495
°
时》
102.接下来,基于图28~图30对温度检测装置1绕逆时针旋转至495
°
的状态进行说明。图28是温度检测部的旋转角度为495
°
时的图12所示的c-c向视剖视图。图29是图28所示的g部的说明图。图30是温度检测部的旋转角度为495
°
时的图12所示的d向视图。此外,图30所示的剖面线部分x表示传感器30的视角。
103.若温度检测部3从420
°
进一步绕逆时针旋转而旋转至495
°
,则升降环8的升降限位器81被嵌入至上框架2a的升降引导部24,升降环8的上升停止。然后,如图28及图29所示,设置于升降环8的下端缘的旋转限制突起85与第1卡合部54相抵而限制固定齿轮部5的旋转。此时,对于温度检测部3而言,如图30所示,传感器帽31的孔部32a的位置与传感器壳体34的开口部34a的位置完全不一致,传感器30全部被传感器壳体34的内部遮挡。
104.然后,温度检测部3通过控制部35控制马达部40的旋转方向而绕顺时针旋转。另外,控制部35基于传感器30在被遮挡的状态下检测出的温度,对传感器30在从传感器壳体34的开口部34a露出时检测出的温度进行修正。
105.如以上所述,本实施方式的温度检测装置1具备:框架2,其形成外廓;温度检测部3,其在框架2的内部被保持为能够转动;驱动部4,其驱动温度检测部3而使其旋转;旋转控制部7,其控制温度检测部3的旋转;以及控制部35,其对通过温度检测部3检测出的温度进行修正。温度检测部3具有检测温度的传感器30、将传感器30保持在内部的传感器帽31、和使传感器30向外部露出的开口部34a,并且温度检测部3具有将传感器帽31保持为能够旋转的传感器壳体34。在温度检测部3从基准位置起旋转360
°
的范围内,旋转控制部7以使传感器30从传感器壳体34的开口部34a露出的状态,使传感器帽31与传感器壳体34同步地旋转。然后,若温度检测部3从基准位置起到达超过360
°
的目标角度,则旋转控制部7使传感器帽31的旋转停止,并使传感器壳体34旋转,由此传感器30的位置从开口部34a偏离,从而在传感器壳体34的内部遮挡传感器30。控制部35构成为:基于传感器30被传感器壳体34遮挡的状态下检测出的温度,对传感器30在从开口部34a露出时检测出的温度进行修正。
106.因此,本实施方式的温度检测装置1以及具备该温度检测装置1的空调机的室内机100在温度检测部3从基准位置起旋转360
°
的范围内,以使传感器30从传感器壳体34的开口部34a露出状态,使传感器帽31与传感器壳体34同步地旋转,因此能够使传感器30旋转360
°
来检测对象空间的温度。另外,若温度检测部3旋转至超过360
°
的目标角度,则使传感器帽31的旋转停止,并使传感器壳体34旋转,由此传感器30的位置从开口部34a偏离,从而传感器30被传感器壳体34的内部遮挡。控制部35基于传感器30以在被传感器壳体34遮挡的状态下检测出的传感器自身的发热温度,对传感器30在从开口部34a露出时检测出的温度进行
修正。因此,本实施方式的温度检测装置1以及具备该温度检测装置1的空调机的室内机100能够不受传感器自身的发热温度的影响,从而提高温度检测精度。
107.以上,基于实施方式说明了温度检测装置1以及具备该温度检测装置1的空调机的室内机100,但温度检测装置1以及具备该温度检测装置1的空调机的室内机100不限定于上述实施方式的结构。例如,温度检测装置1以及具备该温度检测装置1的空调机的室内机100不限定于上述构成要素,也可以包括其他构成要素。另外,温度检测装置1不限定于设置于空调机的室内机100的结构,也可以设置于其他装置。总之,对于温度检测装置1以及具备该温度检测装置1的空调机的室内机100而言,在不脱离其技术思想的范围中,包含本领域技术人员通常进行的设计变更及应用的变化范围。
108.附图标记说明:
[0109]1…
温度检测装置;2
…
框架;2a
…
上框架;2b
…
下框架;2a
…
接合部件;3
…
温度检测部;4
…
驱动部;5
…
固定齿轮部;6
…
驱动齿轮部;7
…
旋转控制部;8
…
升降环;9
…
旋转式键;10
…
壳体;10a
…
第1开口部;10b
…
第2开口部;11
…
室内送风机;12
…
室内热交换器;13
…
排水盘;14
…
送风机驱动用马达;15
…
喇叭口;16
…
装饰面板;16a
…
排出口;17
…
吸入格栅;18
…
罩部件;20
…
上部收容部;21
…
上部套筒;21a
…
台阶部;22
…
键轴部;23a、23b
…
限位部件;24
…
升降引导部;25
…
下部收容部;26
…
下部套筒;27
…
座面部;28
…
突起部;29
…
台阶部;30
…
传感器;31
…
传感器帽;32
…
下部帽;32a
…
孔部;32b
…
突起部;33
…
上部帽;33a
…
狭缝部;34
…
传感器壳体;34a
…
开口部;34b
…
卡合孔;34c
…
卡合狭缝;34d
…
突起承接部;35
…
控制部;35a
…
驱动控制部;35b
…
温度取得部;35c
…
运算部;40
…
马达部;40a
…
马达轴;50
…
上部筒体;51
…
下部筒体;51a
…
爪部;51b
…
线状突起部;52
…
凸缘部;53
…
第1正齿轮;54
…
第1卡合部;60
…
中空轴部;60a
…
马达轴承部;60b
…
突起承接部;61
…
第2正齿轮;80
…
凸缘部;81
…
升降限位器;82
…
肋;83
…
旋转限位器;84
…
第2卡合部;85
…
旋转限制突起;90
…
键轴承;91
…
键壁面部;91a、91b
…
上限位器;92
…
下限位器;100
…
空调机的室内机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1