一种基于机器学习的环路热管太阳能流速控制方法
1.本发明属于太阳能领域,尤其涉及一种太阳能集热器系统。
背景技术:
2.随着现代社会经济的高速发展,人类对能源的需求量越来越大。然而煤、石油、天然气 等传统能源储备量不断减少、日益紧缺,造成价格的不断上涨,同时常规化石燃料造成的环 境污染问题也愈加严重,这些都大大限制着社会的发展和人类生活质量的提高。能源问题已 经成为当代世界的最突出的问题之一。因而寻求新的能源,特别是无污染的清洁能源已成为 现在人们研究的热点。
3.太阳能是一种取之不尽用之不竭的清洁能源,而且资源量巨大,地球表面每年收的太阳 辐射能总量为1
×
10
18
kw
·
h,为世界年耗总能量的一万多倍。世界各国都已经把太阳能的 利用作为新能源开发的重要一项。然而由于太阳辐射到达地球上的能量密度小(每平方米约 一千瓦),而且又是不连续的,这给大规模的开发利用带来一定困难。因此,为了广泛利用太 阳能,不仅要解决技术上的问题,而且在经济上必须能同常规能源相竞争。
4.针对集热器的结构,现有技术已经进行了很多的研发和改进,但是整体来说集热能力不 足,而且还存在运行时间长容易结垢问题,影响集热效果。
5.无论哪种形式和结构的太阳能集热器,都要有一个用来吸收太阳辐射的吸收部件,集热 器的结构对太阳能的吸收起到重要的作用。
6.针对上述问题,本发明在前面发明的基础上进行了改进,提供了一种新的环路热管太阳 能集热系统,从而解决热管换热量低及其换热不均匀的问题。
7.在应用中发现,太阳能持续集热加热或者晚上不加热会导致内部流体形成稳定性,即流 体不再流动或者流动性很少,或者流量稳定,导致集热管振动性能大大减弱,从而影响集热 管的除垢以及加热的效率。因此需要对上述太阳能集热器进行改进。本技术人已经对此申请 了相关的专利。
8.但是,在实践中发现,通过固定性周期性以及参数或者参数差变化来调整管束的振动, 会出现滞后性以及周期会出现过长或者过短的情况。因此本发明对前面的申请进行了改进, 对振动进行智能型控制,从而使得内部的流体能够实现的频繁性的振动,从而实现很好的除 垢以及加热效果。
技术实现要素:
9.本发明针对现有技术中的不足,提供一种新式结构的集热装置。该集热装置能够基于机 器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集热装置实时监控系统 中压力数据,设计出相应的集热运行模式,用大量的压力数据训练深度卷积神经网络,从而 进行集热装置除垢,提高热利用效果和除垢效果。
10.为实现上述目的,本发明采用如下技术方案:
11.一种基于机器学习的环路热管太阳能流速控制方法,所述集热装置包括反射镜和
集热管 箱,所述集热装置包括除垢阶段,所述采取如下方式运行:在除垢阶段,采取如下方式运行:
12.管束自由端内部设置速度感知元件,用于检测管束自由端内的流体的流速,所述速度感 知元件与控制器进行数据连接,所述速度数据实时存储在数据库中,采用一维深度卷积神经 网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢。
13.作为优选,所述基于速度模式识别包括如下步骤:
14.1)数据准备:对数据库中的集热管箱8的速度数据进行重新审查和校验,对缺失数据、 无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
15.2)生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
16.3)网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量, 送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算 法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训 练完成。
17.4)网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
18.5)集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
19.作为优选,生成数据集步骤包括如下步骤:
20.1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的 速度数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中, 我们将运行工况分为标签为1,进行集热装置集热,标签为2,集热装置不集热。程序根据不 同的工况,自动生成工况标签;
21.作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的 数据。工况包括季节、天气、时间等至少之一因素。
22.2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的 速度数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况 标签一样,由程序根据运行工况自动生成。
23.作为优选,所述集热装置包括位于下部的集热管箱、左上管、右上管和放热管组,左上 管、右上管位于集热管箱的上部,所述放热管组包括左放热管组和右放热管组,左放热管组 与左上管和集热管箱相连通,右放热管组与右上管和集热管箱相连通,从而使得集热管箱、 左上管、右上管和放热管组形成加热流体封闭循环,所述放热管组为一个或多个,每个放热 管组包括圆弧形的多根放热管,相邻放热管的端部连通,使多根放热管形成串联结构,并且 使得放热管的端部形成放热管自由端;集热管箱包括第一管口和第二管口,第一管口连接左 放热管组的入口,第二管口连接右放热管组的入口,左放热管组的出口连接左上管,右放热 管组的出口连接右上管。
24.本发明具有如下优点:
25.1、本发明能够基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况, 利用集热装置实时监控系统中压力数据,设计出相应的集热运行模式,用大量的压力数据训 练深度卷积神经网络,从而进行集热装置除垢,提高热利用效果和除垢效果。
26.2、本发明提出了新式结构的集热装置,该集热装置能够提高集热效果,提高集热
管的 放热能力,减小能量的耗费。
27.3、一种新式结构的集热装置,通过在有限的空间设置更多的放热管组,增加管束的振 动范围,从而强化传热,增强除垢。
28.4、本发明通过流体流动方向上的放热管组管径以及间距分布的设置,可以进一步提高 换热效率。
29.5、本发明通过大量的实验和数值模拟,优化了集热装置的参数的最佳关系,从而实现 最优的加热效率。
附图说明:
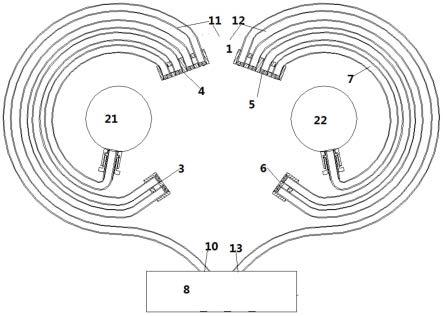
30.图1为本发明集热装置的主视图。
31.图2-1为本发明集热系统的集热主视图。
32.图2-2为本发明集热系统的不集热主视图。
33.图2-3为本发明优选的集热装置的集热主视图。
34.图2-4为本发明优选的集热装置的不集热主视图。
35.图3为优选的液压泵的剖视图。
具体实施方式
36.下面结合附图对本发明的具体实施方式做详细的说明。
37.本文中,如果没有特殊说明,涉及公式的,“/”表示除法,
“×”
、“*”表示乘法。
38.如图1所示,一种集热装置,包括集热管箱8、左上管21、右上管22和放热管组1,所 述放热管组1包括左放热管组11和右放热管组12,左放热管组11与左上管21和集热管箱8 相连通,右放热管组12与右上管22和集热管箱8相连通,从而使得集热管箱8、左上管21、 右上管22和放热管组1形成加热流体封闭循环,集热管箱8内填充相变流体,每个放热管组 1包括圆弧形的多根放热管7,相邻放热管7的端部连通,使多根放热管7形成串联结构,并 且使得放热管7的端部形成放热管自由端3-6;集热管箱包括第一管口10和第二管口13,第 一管口10连接左放热管组11的入口,第二管口13连接右放热管组12的入口,左放热管组 11的出口连接左上管21,右放热管组12的出口连接右上管22;所述第一管口10和第二管 口13设置在在集热管箱8一侧。作为优选,左放热管组11和右放热管组12沿着集热管箱的 中间位置对称。
39.作为优选,左上管21、右上管22和放热管组1设置在箱体9内,箱体9中设置流动的 流体,所述流体优选是空气或者水。
40.作为优选,所述左上管21、右上管22与集热管箱8沿着水平方向延伸。
41.作为优选,流体沿着水平方向流动。
42.作为优选,沿着左上管21、右上管22与集热管箱8水平方向延伸上设置多个放热管组 1,所述放热管组1之间是并联结构。
43.作为优选,所述左上管21与集热管箱8之间设置左回流管14,所述右上管22与集热管 箱8之间设置右回流管15。作为优选,所述回流管设置在集热管箱8的两端。
44.集热管箱8内填充相变流体,优选是汽液相变流体。所述流体在集热管箱8进行加热蒸 发,沿着放热管束向左上管21、右上管22流动,流体受热后会产生体积膨胀,从而形成
蒸 汽,而蒸汽的体积远远大于水,因此形成的蒸汽会在盘管内进行快速冲击式的流动。因为体 积膨胀以及蒸汽的流动,能够诱导放热管自由端产生振动,换热管自由端在振动的过程中将 该振动传递至箱体9内的换热流体,流体也会相互之间产生扰动,从而使得周围的换热流体 形成扰流,破坏边界层,从而实现强化传热的目的。流体在左右上管冷凝放热后又通过回流 管回流到集热管箱。
45.本发明通过对现有技术进行改进,将上管和放热管组分别设置为左右分布的两个,使得 左右两侧分布的放热管组都能进行振动换热除垢,从而扩大换热振动的区域,越能够使得振 动更加均匀,换热效果更加均匀,增加换热面积,强化换热和除垢效果。
46.上述结构已经进行了专利申请,本技术是对上述结构进行进一步改进,增强除垢以及换 热效果。
47.在太阳能集热器的运行中,虽然上述结构具有弹性振动除垢效果,但是长时间运行发现 除垢效果需要进一步改进。
48.研究以及实践中发现,持续性的稳定性的集热会导致内部换热部件的流体形成稳定性, 即流体不再流动或者流动性很少,或者流量稳定,导致放热管组1振动性能大大减弱,从而 影响管组1的除垢以及加热的效率。例如白天持续的集热,或者晚上持续不集热,导致除垢 效果下降,在先申请中采取了白天持续的集热,或者晚上电加热除垢,上述对于白天的集热 效果具有很大的提高。但是上述结构需要单独设置一个电加热装置,而且需要设计复杂的电 加热相关的装配,导致结构复杂,因此需要对上述集热装置进行如下改进。
49.在本发明人的在先申请中,提出了一种周期性以及参数或者参数差的加热方式,通过周 期性的加热方式来不断的促进盘管的振动,从而提高加热效率和除垢效果。但是,通过变化 来调整管束的振动,会出现滞后性以及周期会出现过长或者过短的情况。因此本发明对前面 的申请进行了改进,对振动进行智能型控制,从而使得内部的流体能够实现频繁性的振动, 从而实现很好的除垢效果。
50.本发明针对在先研究的技术中的不足,提供一种新式的智能控制振动的除垢集热器。该 集热器能够实现很好的除垢效果。
51.所述太阳能集热器包括除垢阶段,在除垢阶段,集热器采取如下方式运行:
52.一、基于温度识别模式
53.作为优选,集热装置内部设置温度感知元件,用于检测集热装置内部的温度,所述温度 感知元件与控制器进行数据连接,所述温度数据实时存储在数据库中,采用一维深度卷积神 经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢。
54.所述基于温度模式识别包括如下步骤:
55.1、数据准备:对数据库中的集热装置的温度数据进行重新审查和校验,对缺失数据、无 效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
56.2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
57.3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量, 送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算 法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训 练完成。
网络的特征提取过程完成;
75.5)初始化全连接网络的权值矩阵w和偏置b,将提取到的特征向量x送入全连接网络,与 权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
76.6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求 导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积 系数;
77.7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网 络模型。
78.网络检测步骤具体步骤如下:
79.1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、 网络权值w,偏置b都已经训练完毕;
80.2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标 签,就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
81.本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据, 检测速度快,成本低。
82.本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的 准确性。
83.具体卷积神经网络的工作过程如下:
84.1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n 表示一维的训练数据;
[0085]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的 大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果 为t=∑(d*g),特征图的大小为[m
×1×n×
q];
[0086]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池 化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程 降低了数据的维度;
[0087]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0088]
通过温度感知元件检测的温度的模式识别,能够在内部的流体的蒸发基本达到了饱和, 内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差, 因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实现振动。 当温度降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新 蒸发膨胀,因此需要进行启动集热管箱进行加热。
[0089]
作为优选,温度感知元件设置在集热管箱8内。
[0090]
作为优选,温度感知元件设置在自由端。通过设置在自由端,能够感知自由端的温度变 化,从而实现更好的控制和调节。
[0091]
二、基于速度自主调节振动
[0092]
作为优选,管束自由端内部设置速度感知元件,用于检测管束自由端内的流体的流速, 所述速度感知元件与控制器进行数据连接,所述速度数据实时存储在数据库中,采用一维深 度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行
集热以进行 除垢。
[0093]
所述基于速度模式识别包括如下步骤:
[0094]
1、数据准备:对数据库中的集热管箱8的速度数据进行重新审查和校验,对缺失数据、 无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
[0095]
2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
[0096]
3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量, 送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算 法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训 练完成。
[0097]
4、网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
[0098]
5、集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
[0099]
本发明提供了一种新的智能控制集热装置振动除垢的系统,基于机器学习与模式识别的 理论方法,根据集热装置不同的运行工况,利用集中集热装置实时监控系统中具有时间相关 性的速度数据,设计出相应的集热装置工作模式(加热模式/不加热模式),用大量的速度数 据训练深度卷积神经网络,从而进行集热装置集热控制。
[0100]
作为优选,数据准备步骤具体包含如下处理:
[0101]
1)缺失数据的处理:由于网络传输的故障,数据库中会出现缺失值。对缺失的数据值, 采用估算的方法,用样本均值代替缺失值;
[0102]
2)无效数据的处理:由于传感器的故障,导致数据库中的速度数据出现无效值,比如负 值或者超出了理论上的最大值,此时对于这些值,将其从数据库中删除;
[0103]
3)不一致数据的处理:借助数据库管理系统的完整性约束机制,检查不一致数据,然后 参考数据库中相应的数据值进行纠正。作为一个优选,在集热装置中,室外温度高的集热速 度一定大于室外温度低的集热速度,如果数据库中室外温度高的集热速度小于室外温度低的 集热速度,此时可以借助数据库管理系统的完整性约束中的检查约束机制,给出用户错误提 示,用户根据错误提示,用预估数据或者相应速度的临界速度数据值代替这种不一致数据的 速度数据值。
[0104]
作为优选,生成数据集步骤包括如下步骤:
[0105]
1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的 速度数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中, 我们将运行工况分为标签为1,进行集热装置集热,标签为2,集热装置不集热。程序根据不 同的工况,自动生成工况标签;
[0106]
作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的 数据。工况包括季节、天气、时间等至少之一因素。
[0107]
2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的 速度数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况 标签一样,由程序根据运行工况自动生成。
[0108]
作为优选可以判断是否集热装置内流体的蒸发达到了饱和,未达到了饱和,标签为1, 达到了饱和,标签为2。
[0109]
网络训练具体步骤如下:
[0110]
1)读入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练批的大小,1
×
n表示 一维的训练数据;
[0111]
2)对读入的训练数据进行第一次卷积操作,得到特征图τ。初始化卷积核g的系数,设g的 大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果 为t=∑(d*g),特征图的大小为[m
×1×n×
q];
[0112]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,给定 池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过 程降低了数据的维度;
[0113]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量x,此时卷积神经 网络的特征提取过程完成;
[0114]
5)初始化全连接网络的权值矩阵w和偏置b,将提取到的特征向量x送入全连接网络,与 权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
[0115]
6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求 导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积 系数;
[0116]
7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网 络模型。
[0117]
网络检测步骤具体步骤如下:
[0118]
1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、 网络权值w,偏置b都已经训练完毕;
[0119]
2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标 签,就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
[0120]
本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据, 检测速度快,成本低。
[0121]
本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的 准确性。
[0122]
具体卷积神经网络的工作过程如下:
[0123]
1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n 表示一维的训练数据;
[0124]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的 大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果 为t=∑(d*g),特征图的大小为[m
×1×n×
q];
[0125]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池 化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程 降低了数据的维度;
[0126]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0127]
通过速度感知元件检测的速度的模式识别,能够在内部的流体的蒸发基本达到了饱和, 内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差, 因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实
现振动。 当速度降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新 蒸发膨胀,因此需要进行启动集热管箱进行加热。作为一个优选,通过反射镜进行旋转的方 式,对集热管箱进行集热或者不集热。当需要集热的时候,反射镜的反射面面向太阳,当不 需要集热的时候,反射镜的反射面不面向太阳。此种方式可以采用常规的太阳光跟踪系统的 旋转反射镜的方式来实现,在此就不必详细说明。
[0128]
作为优选,可以采取另一个实施例,采取集热管箱是否位于反射镜焦点的方式来完成是 否对集热管箱进行集热或者不集热的操作。当需要集热的时候,集热管箱位于反射镜的焦点, 当不需要集热的时候,集热管箱不位于反射镜的焦点。
[0129]
如图1所示,所述反射镜16沿着中部分为两部分,分别是第一部分161和第二部分162, 第一部分161和第二部分162,如图2所示。所述支撑件17是支撑柱,设置在集热管箱8的 下部,液压伸缩杆171,172分别从支撑柱上伸出延伸连接到第一部分161和第二部分162。 用来驱动第一部分和第二部分分开或者合并。当第一部分和第二部分合并在一起时,所述的 反射镜16构成一个完整的反射镜,所述集热管箱位于反射镜16的焦点位置处,用于对集热 管箱进行集热。当第一部分和第二部分分开时,所述的集热管箱不位于第一部分和第二部分 的焦点,不对集热管箱进行加热。
[0130]
作为优选,所述的液压伸缩杆连接驱动器,通过驱动器驱动液压伸缩杆的伸缩,通过液 压伸缩杆的伸缩来使得反射镜的焦点发生位置变化。
[0131]
所述液压伸缩杆通过枢转的方式连接到支撑件17上。
[0132]
作为一个改进的实施例,如图2-3、2-4所示。所述集热装置包括右液压泵24,左液压 泵25,右液压装置26和左液压装置27,右液压装置26和左液压装置27上部设置伸缩杆35、 36,所述伸缩杆通过枢转方式连接到第二部分162和第一部分161的下部,所述右液压泵24, 左液压泵25分别驱动右液压装置26和左液压装置27的上升和下降。
[0133]
作为优选,所述的装置还包括右支撑杆28和左支撑缩杆29,所述右支撑杆28和左支撑 杆29包括第一部件和第二部件,第一部件位于下部,第一部件下端通过枢转方式连接在支撑 杆17上,第二部件是伸缩杆,伸缩杆的上端通过枢转方式连接到第一部分162和第二部分 162。所述伸缩杆可以在第一部件内伸缩。所述右支撑杆28和左支撑杆29用于支撑反射镜, 使得反射镜保持在下部相应的位置。例如反射镜第一部分和第二部分合为一体时候,通过右 支撑杆28和左支撑杆29的支撑使其保持在相应位置,使得集热管箱8位于反射镜焦点位置。
[0134]
作为优选,所述的第一部件是杆,所述杆中间开孔,从而使得伸缩杆能够在第一部件内 伸缩。
[0135]
作为优选,右支撑杆28和左支撑缩杆29也采用液压的方式,单独设置液压泵,所述第 一部件是液压装置,通过液压泵驱动伸缩杆进行伸缩。具体结构和右液压装置26和左液压装 置27类似。
[0136]
图3展示了液压泵的具体结构。如图3所示,液压泵包括偏心轮30、单向阀31、油缸 32、截止阀33、柱塞34,偏心轮30连接柱塞34。柱塞34设置在柱塞腔38内,柱塞腔38 与液压泵连通。液压泵包括腔体,腔体上部设置伸缩杆,伸缩杆下端是与液压泵腔体内径相 同的板状结构39,板状结构中部延伸出的杆状结构40,杆状结构40伸出液压泵腔体连接反 射镜。
[0137]
腔体下部是油缸32,油缸和伸缩杆之间设置两个单向阀31,供液体从下部油缸进入上 部,来推动伸缩杆向上移动;两个单向阀分别设置在柱塞腔与液压泵连通位置的上部和下部; 所述两个单向阀31的与柱塞腔与液压泵连通位置的相对的一侧(远离柱塞腔与液压泵连通位 置的一侧)设置隔离壁37,所述隔离壁37与腔体的柱塞腔与液压泵连通位置的相对的一侧 壁之间具有一定的距离,并设置截止阀33。通过截止阀的打开以便供液体从上部流入下部油 缸32。
[0138]
当要使反光镜升高使装置停止集热时,可以驱动右液压泵24以及左液压泵25,偏心轮 30会带动柱塞34往复运动。柱塞34右移时,缸体中产生真空,油液通过单向阀吸入,完成 吸油过程。柱塞34左移时,缸体内的油会通过单向阀31输入到液压系统中。凸轮连续旋转, 便可使反光镜升高。
[0139]
当要使反光镜下降使装置开始集热时,便可打开截止阀33,液压系统上部的油便会流回 油缸中,于是反光镜在重力的作用下便会归于原位。
[0140]
当然,液压泵也是现有技术一种非常成熟的技术,图3的实施例仅仅是简单的介绍,不 作为限定。现有技术中的所有液压泵都可以用来使用。
[0141]
除垢时间优选可以是太阳能集热器运行一段时间后进行。优选是当集热效果变差的时候 进行。
[0142]
虽然本发明已以较佳实施例披露如上,但本发明并非限定于此。任何本领域技术人员, 在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权 利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1