一种空调器的控制方法、装置及可读存储介质与流程
1.本发明涉及空调技术领域,具体而言,涉及一种空调器的控制方法、装置及可读存储介质。
背景技术:
2.目前,随着空调器技术的发展,室内空调器逐渐实现了多种附加的功能,例如除尘、杀菌等。而在空调房间内,不同区域人员走动频率不同,其灰尘积累程度和空气污染程度也不同,而对空调器体积较大,即使是可移动的空调器也不便于检测各个位置的环境指标,不便于对净化效率进行适应性调节,而对所有区域都采用较高的净化效率又存在浪费能源的问题。
技术实现要素:
3.本发明解决的问题为空调器不便于检测房间内各个位置的环境指标,难以调节净化效率的问题。
4.为解决上述问题,本发明提供一种空调器的控制方法、装置及可读存储介质。
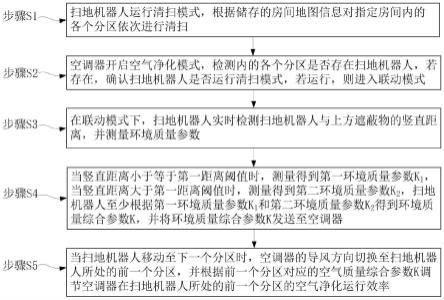
5.一方面,本发明提供一种空调器的控制方法,所述空调器的控制方法包括:步骤s1:扫地机器人运行清扫模式,根据储存的房间地图信息对指定房间内的各个分区依次进行清扫;步骤s2:空调器开启空气净化模式,检测内的各个分区是否存在所述扫地机器人,若存在,确认所述扫地机器人是否运行所述清扫模式,若运行,则进入联动模式;步骤s3:在联动模式下,所述扫地机器人实时检测所述扫地机器人与上方遮蔽物的竖直距离,并测量环境质量参数;步骤s4:当所述竖直距离小于等于第一距离阈值时,测量得到第一环境质量参数k1,当所述竖直距离大于第一距离阈值时,测量得到第二环境质量参数k2,所述扫地机器人至少根据所述第一环境质量参数k1和所述第二环境质量参数k2得到环境质量综合参数k,并将所述环境质量综合参数k发送至所述空调器;步骤s5:当所述扫地机器人移动至下一个分区时,所述空调器的导风方向切换至所述扫地机器人所处的前一个分区,并根据前一个分区对应的所述空气质量综合参数k调节所述空调器在所述扫地机器人所处的前一个分区的空气净化运行效率。
6.与现有技术相比,采用该技术方案所达到的技术效果:根据储存的房间地图对指定房间按分区清扫,可以实现全面有序的清扫;根据扫地机器人与其上方遮蔽物的竖直距离,可以判断扫地机器人当前所处的地面是否为日常生活中容易触及的地方,从而反映出灰尘的堆积程度;因此,计算竖直距离较小位置的环境参数和竖直距离较大位置的环境参数,综合考虑某一分区所需采用的空气净化效率,并在空调器的导风方向朝向该分区时执行调整后的空气净化效率,从而对空气进行有效的净化同时节省能源;在扫地机器人清扫后再执行空气净化的动作,可以避免空调吹出的气流影响扫地机器人的清扫效果;当然,根据竖直距离划分为更多的等级,可以得到更多组不同的环境参数,综合考虑后调整的空气净化效率能够更加合理。
7.进一步的,所述第一环境质量参数k1包括第一空气污染参数k
a1
,所述第二环境质量参数k2包括第二空气污染参数k
a2
;所述步骤s3还包括:所述扫地机器人通过烟雾检测模块、甲醛检测模块、粉尘检测模块、pm2.5检测模块和/或氧负离子检测模块检测空气污染参数;所述步骤s4还包括:当所述竖直距离小于等于第一距离阈值时,测量得到第一空气污染参数k
a1
,当所述竖直距离大于第一距离阈值时,测量得到第二空气污染参数k
a2
。
8.采用该技术方案所达到的技术效果:烟雾检测模块、甲醛检测模块、粉尘检测模块、pm2.5检测模块和/或氧负离子检测模块可以分别检测出烟雾、甲醛、pm2.5和/或氧负离子等污染物,从而准确评估空气污染情况,在此基础上,与扫地机器人竖直距离不同的遮蔽物下方的空气污染情况不同,综合考虑后可以得到有效而节能的空气净化效率。
9.进一步的,所述第一环境质量参数k1还包括第一地面污染参数k
b1
,所述第二环境质量参数k2还包括第二地面污染参数k
b2
;所述步骤s3还包括:所述扫地机器人检测收集的灰尘质量,计算灰尘质量增加速率,得到地面污染参数;所述步骤s4还包括:当所述竖直距离小于等于第一距离阈值时,测量得到第一地面污染参数k
b1
,当所述竖直距离大于第一距离阈值时,测量得到第二地面污染参数k
b2
。
10.采用该技术方案所达到的技术效果:根据灰尘质量增加速率可以直接反应所处分区的灰尘堆积情况,也即该分区的空气质量情况,在此基础上,与扫地机器人竖直距离不同的遮蔽物下方的灰尘堆积情况不同,综合考虑后可以得到有效而节能的空气净化效率。
11.进一步的,所述扫地机器人检测收集的灰尘质量,计算灰尘质量增加速率,得到地面污染参数,包括:所述扫地机器人每t1时间检测总垃圾质量m0,计算得到t1时间内的垃圾质量增加量
△
m,当
△
m小于等于灰尘质量阈值时,计算t1时间内的灰尘质量增加速率;当
△
m大于灰尘质量阈值时,忽略本次
△
m的值,t1时间内的灰尘质量增加速率选取前n个灰尘质量增加速率的平均值;其中,n为常数。
12.采用该技术方案所达到的技术效果:忽略数值较大的
△
m值,也即排除了大型污染物或垃圾进入扫地机器人内部的情况,避免其影响灰尘质量的计算准确性,当间隔时间t1足够小时,数值较大的
△
m值中,大型污染物或垃圾所附带的灰尘产生的误差也可以减小,因此该计算方式能够准确计算灰尘质量,从而得到准确的灰尘堆积情况。
13.进一步的,所述第一环境质量参数k1=x1k
a1
+y1k
b1
;所述第二环境质量参数k2=x2k
a2
+y2k
b2
;其中,x1、y1、x2、y2为常数。
14.采用该技术方案所达到的技术效果:空气污染参数能够直接反应空气需要净化的程度,而地面污染参数间接反应该分区的空气需要净化的程度,因此采用不同系数以得到环境质量参数,可以得到更加有效而节能的空气净化效率的值。
15.进一步的,环境质量综合参数k=xk1+yk2;其中,x、y为常数,并且,x>y。
16.采用该技术方案所达到的技术效果:遮蔽物与扫地机器人之间的数值距离越小,日常生活中越难以触及,因此计算得到的第一环境质量参数k1往往远大于第二环境质量参数k2,若采用相同的系数,会导致无遮蔽物位置测得的第二环境质量参数k2的数据有效性降低,并且无遮蔽物位置中人员流动较大,环境要求更高,因此采用更高的权重可以得到更合理的空气净化效率的值。
17.进一步的,所述空调器的控制方法还包括:所述空调器实时检测所述指定房间内是否有走动人员,若有所述走动人员,记录所述走动人员经过的所述分区为目标分区;所述
扫地机器人对所述走动人员进行避让,并重新规划路线。
18.采用该技术方案所达到的技术效果:有走动人员的分区清扫不便,扫地机器人进行避让能够避免干涉;经过走动的目标分区,需要重新清扫,避免重新规划路线避免重复清扫,提高清扫效率。
19.进一步的,所述空调器的控制方法还包括:所述空调器和/或所述扫地机器人通过声音识别所述走动人员在各个所述目标分区走动的步数,根据步数调节所述空调器在所述目标分区的空气净化运行效率。
20.采用该技术方案所达到的技术效果:经过走动的目标分区中灰尘和其他污染物更多,在经过扫地机器人清扫后,空气中会有更多的灰尘或污染物残留,因此需要进一步提高空气净化运行效率,提高清洁效果。
21.另一方面,本发明提供一种空调器的控制装置,用于实现如上述任一实施例提供的空调器的控制方法,所述空调器的控制装置包括:扫地控制模块,所述扫地控制模块用于扫地机器人运行清扫模式,根据储存的房间地图信息对指定房间内的各个分区依次进行清扫;空气净化判断模块,所述空气净化控制模块用于空调器开启空气净化模式,检测内的各个分区是否存在所述扫地机器人,若存在,确认所述扫地机器人是否运行所述清扫模式,若运行,则进入联动模式;测量模块,所述测量模块用于在联动模式下,所述扫地机器人实时检测所述扫地机器人与上方遮蔽物的竖直距离,并测量环境质量参数;扫地判断模块,所述判断模块用于当所述竖直距离小于等于第一距离阈值时,测量得到第一环境质量参数k1,当所述竖直距离大于第一距离阈值时,得到第二环境质量参数k2,所述扫地机器人至少根据所述第一环境质量参数k1和所述第二环境质量参数k2得到环境质量综合参数k,并将所述环境质量综合参数k发送至所述空调器;空气净化控制模块,所述空气净化控制模块用于当所述扫地机器人移动至下一个分区时,所述空调器的导风方向切换至所述扫地机器人所处的前一个分区,并根据前一个分区对应的所述空气质量综合参数k调节所述空调器在所述扫地机器人所处的前一个分区的空气净化运行效率。
22.采用该技术方案所达到的技术效果:扫地控制模块用于控制扫地机器人的清扫动作;空气净化判断模块用于实现联动模式;测量模块用于测量扫地机器人与上方遮蔽物的竖直距离和对应的环境质量参数,当任意分区内存在多个不同竖直距离的遮蔽物的区域,或者同时还存在无遮蔽物的区域时,可以综合考虑环境质量参数,从而通过扫地判断模块判断,得到更加合理的空气净化运行效率;空气净化控制模块用于采用不同的空气净化运行效率对不同分区进行净化。
23.再一方面,本发明提供一种可读存储介质,所述可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如上述任一实施例提供的空调器的控制方法。
24.采用该技术方案所达到的技术效果:可读存储介质用于存储该计算机程序,可以在不同的空调器和扫地机器人上运行,实现该空调器的控制方法,以达到同样的效果。
25.综上所述,本技术上述各个实施例可以具有如下一个或多个优点或有益效果:i)根据扫地机器人与其上方遮蔽物的竖直距离,可以判断扫地机器人当前所处的地面是否为日常生活中容易触及的地方,从而反映出灰尘的堆积程度,以及空气污染的程度;ii)计算竖直距离较小位置的环境参数和竖直距离较大位置的环境参数,综合考虑某一分区所需采
用的空气净化效率,并在空调器的导风方向朝向该分区时执行调整后的空气净化效率,从而对空气进行有效的净化同时节省能源;iii)忽略数值较大的
△
m值,能够排除大型污染物或垃圾进入扫地机器人内部的情况,从而得到准确的灰尘堆积情况;iv)经过人员走动的目标分区中灰尘和其他污染物更多,在经过扫地机器人清扫后,空气中会有更多的灰尘或污染物残留,因此进一步提高空气净化运行效率,能够提高清洁效果。
附图说明
26.图1为本发明第一实施例提供的一种空调器的控制方法的流程示意图;
27.图2为本发明第二实施例提供的一种空调器的控制装置的模块示意图;
28.附图标记说明:
29.100-空调器的控制装置;110-扫地控制模块;120-空气净化判断模块;130-测量模块;140-扫地判断模块;150-空气净化控制模块。
具体实施方式
30.本发明的目的在于提供一种空调器的控制方法、装置及可读存储介质,便于检测房间内各个位置的环境指标,以调节不同位置的空气净化效率。
31.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
32.参见图1,一方面,本发明第一实施例提供一种空调器的控制方法,空调器的控制方法包括:
33.步骤s1:扫地机器人运行清扫模式,根据储存的房间地图信息对指定房间内的各个分区依次进行清扫;
34.步骤s2:空调器开启空气净化模式,检测内的各个分区是否存在扫地机器人,若存在,确认扫地机器人是否运行清扫模式,若运行,则进入联动模式;
35.步骤s3:在联动模式下,扫地机器人实时检测扫地机器人与上方遮蔽物的竖直距离,并测量环境质量参数;
36.步骤s4:当竖直距离小于等于第一距离阈值时,测量得到第一环境质量参数k1,当竖直距离大于第一距离阈值时,测量得到第二环境质量参数k2,扫地机器人至少根据第一环境质量参数k1和第二环境质量参数k2得到环境质量综合参数k,并将环境质量综合参数k发送至空调器;
37.步骤s5:当扫地机器人移动至下一个分区时,空调器的导风方向切换至扫地机器人所处的前一个分区,并根据前一个分区对应的空气质量综合参数k调节空调器在扫地机器人所处的前一个分区的空气净化运行效率。
38.在本实施例中,根据储存的房间地图对指定房间按分区清扫,可以实现全面有序的清扫;根据扫地机器人与其上方遮蔽物的竖直距离,可以判断扫地机器人当前所处的地面是否为日常生活中容易触及的地方,从而反映出灰尘的堆积程度;因此,计算竖直距离较小位置的环境参数和竖直距离较大位置的环境参数,综合考虑某一分区所需采用的空气净化效率,并在空调器的导风方向朝向该分区时执行调整后的空气净化效率,从而对空气进行有效的净化同时节省能源;在扫地机器人清扫后再执行空气净化的动作,可以避免空调
吹出的气流影响扫地机器人的清扫效果;当然,根据竖直距离划分为更多的等级,可以得到更多组不同的环境参数,综合考虑后调整的空气净化效率能够更加合理。
39.优选的,在步骤s1中,房间地图信息可直接导入,也可以在指定房间内第一次进行清扫时通过侧面的距离传感器进行引导,得到封闭的清扫路径,从而识别指定房间的形状,此处不做限定。
40.优选的,指定房间的各个分区可以沿纵横方向均匀分割,扫地机器人对各个分区依次进行清扫时,可以以环绕式由外到内或由内到外清扫,或者以s型的平行路径逐渐推进,此处不做限定。
41.在一个具体的实施例中,第一环境质量参数k1包括第一空气污染参数k
a1
,第二环境质量参数k2包括第二空气污染参数k
a2
;步骤s3还包括:扫地机器人通过烟雾检测模块、甲醛检测模块、粉尘检测模块、pm2.5检测模块和/或氧负离子检测模块检测空气污染参数;步骤s4还包括:当竖直距离小于等于第一距离阈值时,测量得到第一空气污染参数k
a1
,当竖直距离大于第一距离阈值时,测量得到第二空气污染参数k
a2
。
42.需要说明的是,烟雾检测模块、甲醛检测模块、粉尘检测模块、pm2.5检测模块和/或氧负离子检测模块可以分别检测出烟雾、甲醛、pm2.5和/或氧负离子等污染物,从而准确评估空气污染情况,在此基础上,与扫地机器人竖直距离不同的遮蔽物下方的空气污染情况不同,综合考虑后可以得到有效而节能的空气净化效率。
43.在一个具体的实施例中,第一环境质量参数k1还包括第一地面污染参数k
b1
,第二环境质量参数k2还包括第二地面污染参数k
b2
;步骤s3还包括:扫地机器人检测收集的灰尘质量,计算灰尘质量增加速率,得到地面污染参数;步骤s4还包括:当竖直距离小于等于第一距离阈值时,测量得到第一地面污染参数k
b1
,当竖直距离大于第一距离阈值时,测量得到第二地面污染参数k
b2
。
44.需要说明的是,根据灰尘质量增加速率可以直接反应所处分区的灰尘堆积情况,也即该分区的空气质量情况,在此基础上,与扫地机器人竖直距离不同的遮蔽物下方的灰尘堆积情况不同,综合考虑后可以得到有效而节能的空气净化效率。
45.在一个具体的实施例中,扫地机器人检测收集的灰尘质量,计算灰尘质量增加速率,得到地面污染参数,包括:扫地机器人每t1时间检测总垃圾质量m0,计算得到t1时间内的垃圾质量增加量
△
m,当
△
m小于等于灰尘质量阈值时,计算t1时间内的灰尘质量增加速率;当
△
m大于灰尘质量阈值时,忽略本次
△
m的值,t1时间内的灰尘质量增加速率选取前n个灰尘质量增加速率的平均值;其中,n为常数。
46.需要说明的是,忽略数值较大的
△
m值,也即排除了大型污染物或垃圾进入扫地机器人内部的情况,避免其影响灰尘质量的计算准确性,当间隔时间t1足够小时,数值较大的
△
m值中,大型污染物或垃圾所附带的灰尘产生的误差也可以减小,因此该计算方式能够准确计算灰尘质量,从而得到准确的灰尘堆积情况。
47.在一个具体的实施例中,第一环境质量参数k1=x1k
a1
+y1k
b1
;第二环境质量参数k2=x2k
a2
+y2k
b2
;其中,x1、y1、x2、y2为常数。
48.需要说明的是,空气污染参数能够直接反应空气需要净化的程度,而地面污染参数间接反应该分区的空气需要净化的程度,因此采用不同系数以得到环境质量参数,可以得到更加有效而节能的空气净化效率的值。
49.在一个具体的实施例中,环境质量综合参数k=xk1+yk2;其中,x、y为常数,并且,x>y。
50.需要说明的是,遮蔽物与扫地机器人之间的数值距离越小,日常生活中越难以触及,因此计算得到的第一环境质量参数k1往往远大于第二环境质量参数k2,若采用相同的系数,会导致无遮蔽物位置测得的第二环境质量参数k2的数据有效性降低,并且无遮蔽物位置中人员流动较大,环境要求更高,因此采用更高的权重可以得到更合理的空气净化效率的值。
51.优选的,在步骤s5中,空调器通过杀菌装置、过滤装置、除湿装置等结构实现空气净化。并且,空调器通过改变压缩机频率,从而改变经过杀菌装置、过滤装置、除湿装置的空气流速,使空气净化运行效率随之改变。
52.在一个具体的实施例中,空调器的控制方法还包括:空调器实时检测指定房间内是否有走动人员,若有走动人员,记录走动人员经过的分区为目标分区;扫地机器人对走动人员进行避让,并重新规划路线。
53.需要说明的是,有走动人员的分区清扫不便,扫地机器人进行避让能够避免干涉;经过走动的目标分区,需要重新清扫,避免重新规划路线避免重复清扫,提高清扫效率。
54.在一个具体的实施例中,空调器的控制方法还包括:空调器和/或扫地机器人通过声音识别走动人员在各个目标分区走动的步数,根据步数调节空调器在目标分区的空气净化运行效率。
55.需要说明的是,经过走动的目标分区中灰尘和其他污染物更多,在经过扫地机器人清扫后,空气中会有更多的灰尘或污染物残留,因此需要进一步提高空气净化运行效率,提高清洁效果。
56.另一方面,本发明提供一种空调器的控制装置100,用于实现如上述任一实施例提供的空调器的控制方法,空调器的控制装置100包括:扫地控制模块110,扫地控制模块用于扫地机器人运行清扫模式,根据储存的房间地图信息对指定房间内的各个分区依次进行清扫;空气净化判断模块120,空气净化控制模块用于空调器开启空气净化模式,检测内的各个分区是否存在扫地机器人,若存在,确认扫地机器人是否运行清扫模式,若运行,则进入联动模式;测量模块130,测量模块用于在联动模式下,扫地机器人实时检测扫地机器人与上方遮蔽物的竖直距离,并测量环境质量参数;扫地判断模块140,判断模块用于当竖直距离小于等于第一距离阈值时,测量得到第一环境质量参数k1,当竖直距离大于第一距离阈值时,得到第二环境质量参数k2,扫地机器人至少根据第一环境质量参数k1和第二环境质量参数k2得到环境质量综合参数k,并将环境质量综合参数k发送至空调器;空气净化控制模块150,空气净化控制模块用于当扫地机器人移动至下一个分区时,空调器的导风方向切换至扫地机器人所处的前一个分区,并根据前一个分区对应的空气质量综合参数k调节空调器在扫地机器人所处的前一个分区的空气净化运行效率。
57.需要说明的是,扫地控制模块用于控制扫地机器人的清扫动作;空气净化判断模块用于实现联动模式;测量模块用于测量扫地机器人与上方遮蔽物的竖直距离和对应的环境质量参数,当任意分区内存在多个不同竖直距离的遮蔽物的区域,或者同时还存在无遮蔽物的区域时,可以综合考虑环境质量参数,从而通过扫地判断模块判断,得到更加合理的空气净化运行效率;空气净化控制模块用于采用不同的空气净化运行效率对不同分区进行
净化。
58.再一方面,本发明提供一种可读存储介质,可读存储介质存储有计算机程序,计算机程序被处理器读取并运行时,实现如上述任一实施例提供的空调器的控制方法。
59.需要说明的是,可读存储介质用于存储该计算机程序,可以在不同的空调器和扫地机器人上运行,实现该空调器的控制方法,以达到同样的效果。
60.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1