一种基于红外热成像技术的薄膜填料清污机及清污方法
本发明涉及一种保洁设备的,尤其涉及一种基于红外热成像技术的薄膜填料清污机及清污方法。
背景技术:
1、冷却塔是用水作为循环冷却剂,从一个系统中吸收热量排放至大气中,以降低水温的装置,在日常生活和工业中都有大量的使用。薄膜填料作为冷却塔重要的组成部分,长时间使用易产生污垢,堵塞填料管道,因此需要定时清洗填料内部污垢,而现有的清洗方式则需要停机作业,耗时耗力,造成了不必要的经济损失。
技术实现思路
1、本发明针对现有填料清污方式需要停机作业,清污效率慢等问题,提出了一种基于红外热成像技术的薄膜填料清污机,能利用红外热成像和图像处理技术快速定位填料表面温度异常处,从而确定堵塞区域进行清污处理,同时本发明内置能源转换装置,可长期放置于冷却塔内部,自主对填料堵塞严重处进行清洗,大大延长了薄膜填料的使用寿命。
2、本发明的技术方案如下:
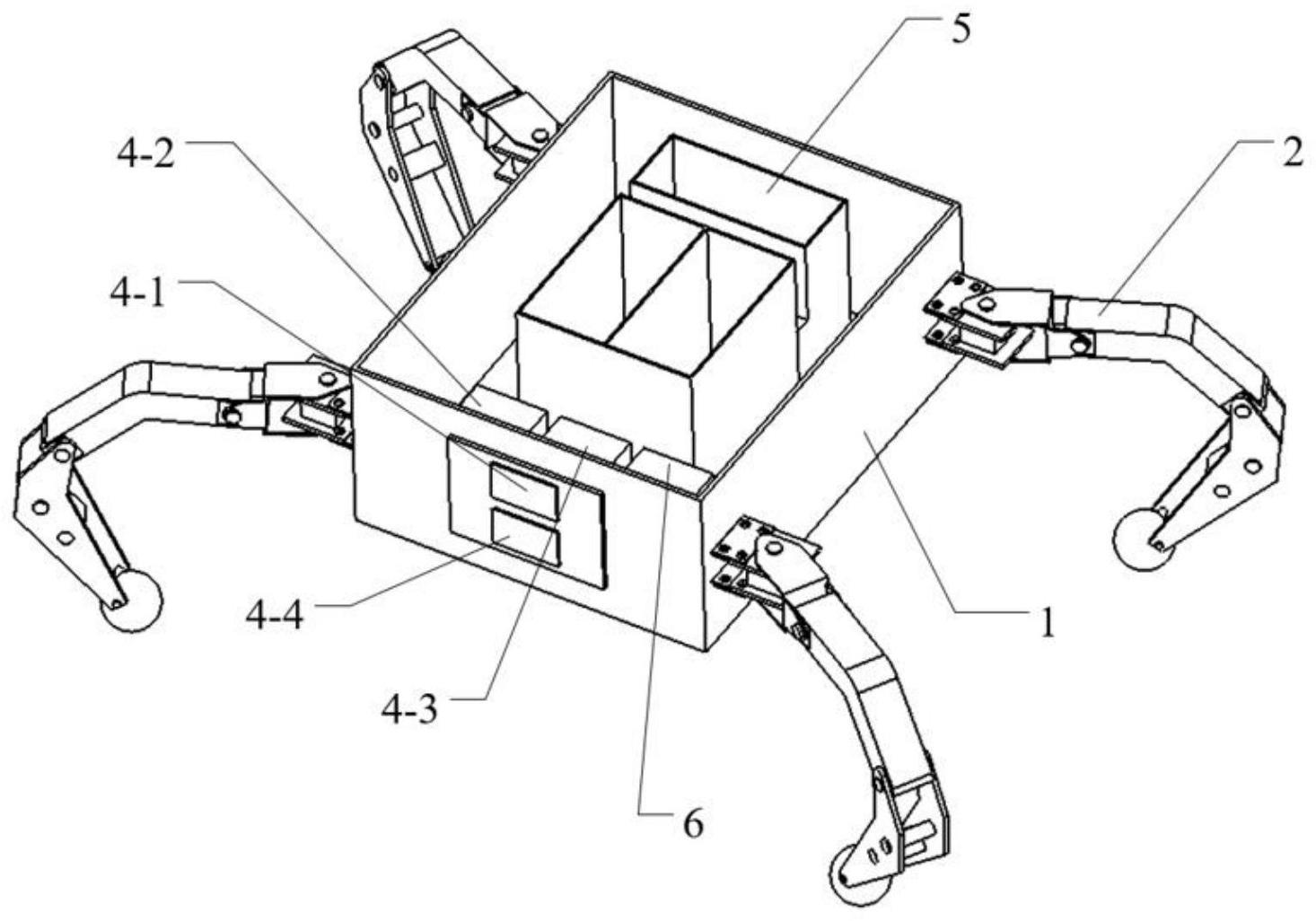
3、一种基于红外热成像技术的薄膜填料清污机,包括清污机本体、移动装置、胶球清洗装置、热成像识别定位装置、清污机能源转换装置以及控制系统;
4、所述清污机本体,用于装载胶球清洗装置、热成像识别定位装置、清污机能源转换装置和控制系统;
5、所述移动装置安装在清污机本体上,用于支承清污机本体在在冷却塔内部填料表面上行走;
6、所述胶球清洗装置,用于清洗冷却塔填料管道内壁上的污垢;
7、所述热成像识别定位装置,用于鉴别冷却塔内部温度异常处,从而确定填料内壁堵塞处;
8、所述清污机能源转换装置,用于将冷却塔内部的风能和热能转换为电能,为清污机提供能量源;
9、控制系统包括数据采集模块、数据处理模块和通信模块,用于控制清污机的工作。
10、优选地,上述清污机移动装置由仿昆虫四足机构组成,用于支承清污机本体在在冷却塔内部填料表面上行走,四足机构的每条腿包括与清污机本体连接的侧摆旋转的第一旋转关节;两个依次通过机械臂、机械臂与第一旋转关节串联的第二旋转关节和第三旋转关节;通过机械臂与第三旋转关节连接的橡胶软球;所述第一旋转关节、第二旋转关节和第三旋转关节用于实现腿部机构的移动、屈伸运动,内部设有电机由控制系统直接控制,四足机构底部设有橡胶软球,其直径大于冷却塔内部薄膜填料贯通孔处孔洞,用于保证清污机移动装置能支承清污机本体在薄膜填料上正常移动而不刮擦破坏填料表面。
11、优选地,上述热成像识别定位装置包括双目摄像机、转换器、红外装置和五个激光传感器,其中双目摄像机和其中一个激光传感器位于清污机本体的前端面,其余四个激光传感器分别位于清污机移动装置的四个机械臂上,双目摄像机经过红外装置、转换器将图像转化为热成像图像,将热成像图像传送至控制系统中的数据采集模块,通过双目摄像机的内外参数,控制系统对图像进行校正从而去除畸变,再利用并行的sgm算法计算,得到视差图,控制系统对获得的视差图进行后处理,利用中值滤波的方法去除噪声。
12、优选地,上述胶球清洗装置包括胶球装置、排水管、活塞一、小型水泵、海绵、浓缩清洗液储存仓、储水仓、转轮机积水仓、胶球收放装置;
13、所述清洗液储存仓上部有倒入口;所述胶球收放装置用于投放和回收胶球装置,对填料贯通孔进行清洗作业;所述储水仓用于收集冷却塔部分流水,用于提供给小型水泵,此外通过浓缩清洗液储存仓中的浓缩清洗液可通过海绵加入储水仓流水中,经小型水泵加压,从排水管冲出,清洗贯通管,加快薄膜填料内污垢的溶解;所述转轮机积水仓为清污机能源转换装置提供部分流水,为胶球收放装置运作,提供部分动力源。
14、优选地,上述胶球收放装置由收放卡扣齿轮、电动机二、齿轮轴、半内齿轮轴、曲柄连杆机构、支撑杆、连杆连接机构、收放球细线组成;所述曲柄连杆机构与活塞一连接,半内齿轮轴与支撑杆末端设有滑轨,能够使其移动分离;
15、所述胶球装置中设有触发垫片、触点垫片、触点垫片、螺旋桨推动器、胶球主体和电动机一;所述触发垫片通过与螺旋桨推动器上部相连固定,用于与触点垫片动作触发螺旋桨推动器启动;与触点垫片动作触发启动小型水泵;其中触发垫片可以随着收放球细线上下移动,触点垫片、触点垫片和螺旋桨推动器固定在胶球清洗装置内壁中;所述电动机一作为螺旋桨推动器动力源。
16、优选地,上述清污机能源转换装置由利用水利、风力的冲击式转轮机、斯特林发动机、集水箱、发电机、蓄电池、齿轮箱组成;
17、所述集水箱用于收集填料塔内布水器喷淋的热水,利用集水箱中流水下流的势能为冲击式转轮机提供动力源进而带动齿轮箱中的齿轮转动,从而带动胶球收放装置工作;所述斯特林发动机利用冷却塔内部流水蒸发散出的热能转换为机械能,为发电机提供动力源,进而为蓄电池供电,以此为清污机其他设备提供能源。
18、优选地,上述冲击式转轮机包括出水流道、转轮机转轴、转轮、转轮室、进水流道、出风流道、进风流道;所述转轮包括叶片,通过水和风的流动冲击叶片带动转轮旋转;所述进水流道与集水箱连接,通过进水阀门的开闭控制集水箱的液位;
19、所述进风流道采用拉法尔喷管,用于提高进入转轮室的冷却风的风速,提高对叶片的冲击力;所述出风流道用于排出转轮室内的冷却风并且给斯特林发动机的冷端散热;所述出水流道用于排出转轮室内完成冲击叶片的热水,然后将热水通过管道输送到胶球投放装置的转轮机积水仓;
20、所述热能发动机包括热端、连接管、轮盘、冷端;所述热端包括活塞二,连杆一;所述热端与集水箱接触,吸收集水箱中热水的热量;所述冷端和热端呈90°布置,冷端安装在出风流道出口处;所述冷端包括散热鳍片,活塞三,连杆二;所述散热鳍片安装在冷端外腔表面,通过出口流道排出的冷却风来吸收散热鳍片上的热量,加快冷端的温度下降;所述连杆一的一端连接热端的活塞二底部,另一端连接在轮盘的最外端;所述连杆二一端连接冷端的活塞五底部,另一端连接在轮盘的最外端;所述轮盘安装在转轴顶端,转轴另一端与发电机连接,为发电机提供动力源;
21、所述连接管用于连接热端和冷端内腔,使两端内部的气体实现流动;所述活塞三通过冷端内腔与外界的压强差,实现左右移动;所述连杆一跟随活塞二运动,带动轮盘旋转;所述连杆二跟随活塞三运动,带动轮盘旋转;所述发电机的动力源由转轴输入,发电机产生的电能通过导线输向蓄电池;
22、齿轮箱包括箱体,斜齿轮,斜齿轮,输出轴;齿轮与转轴连接,转轮通过转轴的传动给齿轮;所述输出轴一端与齿轮连接,输出轴另一端与齿轮轴连接;所述齿轮和齿轮相互啮合并且安装在箱体中;齿轮带动齿轮旋转,齿轮通过输出轴将动力输出给齿轮轴。
23、一种基于红外热成像技术的薄膜填料清污机的清污方法,利用了上述的清污机,包括以下步骤:
24、s1:通过热成像识别定位装置获取移动路径;冷却塔内部薄膜填料表面为圆形截面,将填料表面分为若干个圆环区域,所设置的圆环区域即为清污机移动路径;将清污机放置于冷却塔内部后,清污机总是从最外侧的圆环区域开始工作,其圆环宽度约为清污机本体机身宽度倍,记为第一圆环,内侧圆环命名以此类推,至圆心处的末位圆环,若末位圆环区域不够则取上一圆环区域补足;
25、具体获取路径方式:
26、s11:清污机放入冷却塔内部开始工作;热成像识别定位装置通过5个激光传感器获取冷却塔内部填料表面移动空间,定位清污机移动装置所处相对位置和填料表面圆心处,确定圆心后,经控制系统记录相对坐标;
27、s12:由控制系统经定位装置所提供的清污机本体、填料表面圆心处的相对坐标算出彼此的直线距离,与清污机本体所在第一圆环内径进行比较,若所算出直线距离在圆环外径与内径长度之内,则表明清污机本体已在第一圆环路径上行走,若不在此范围内,则清污机本体调整位置,移动到第一圆环之上;
28、s13:校准路径后,清污机本体重新记录坐标,在所在圆环内,开始进行圆周运动;若距离发生超出范围,则控制系统控制清污机移动装置进行修正,保持清污机本体按圆环路径移动;
29、s14:往后第二圆环、第三圆环等路径移动、校准方式同上;运动至圆心处,再此重复上述路径,回到第一圆环处为一次清洗周期;
30、s2:清污机本体在第一圆环内运动中,热成像识别定位装置持续运作,双目摄像机拍摄当前位置的图像,经过红外装置将图像转化为热成像图像,将热成像图像传送至控制系统中的数据采集模块;
31、s3:通过相机的内外参数,控制系统对图像进行校正从而去除畸变;再利用并行的sgm算法计算,得到视差图,信息收集及控制系统对获得的视差图进行后处理,利用中值滤波的方法去除噪声,热成像节点独立搜索点即温度低于40℃的为冷点,高于75℃的为热点,有“8字”型图像的为“损点”;在其中一个节点检测到热点、冷点后,计算相对位置坐标,传送给移动机构;检测到损点后,计算相应坐标位置,保存于系统中,在后序冷却塔停机维修时,设备维护人员进入填料塔相应坐标位置进行修补工作;
32、s4:清污机获得热点坐标,移动机构移动至指定坐标位置,投放胶球于填料口中进行清污处理;若拍摄图像内无热点坐标,则清污机继续沿路径前进;
33、具体清污方式:
34、s41:清污机本体移动至热点坐标正上方,胶球清洗装置对堵塞填料贯通孔投入胶球,控制系统开启进水流道阀门,热水进入转轮机后冲击叶片,辅助叶片旋转,此时转动机动力源有风能和水能,叶片转速较高,胶球收放装置通过与转轮机传动带动普通齿轮轴旋转,齿轮轴与半齿轮轴啮合带动其一起做旋转运动,半齿轮轴带动曲柄连杆机构推动活塞向下推压胶球装置进入填料贯通孔,半齿轮轴、支撑轴随着重力与活塞一同下落直到滑轨底部,此时半齿轮轴与齿轮轴分离脱落;
35、s42:胶球装置进入贯通孔由于转轮机传动稳定,胶球上端垫片随着冲击式转轮机传动匀速放线,以至于触发垫片与触点垫片触碰,控制系统获得信号并启动电动机,使螺旋桨转动,螺旋桨旋转推动胶球装置不断向下移动;
36、s43:当触发垫片回到初始位置及细绳达紧绷状态时螺旋桨停止且触发垫片触碰到触点垫片时,通过储水仓、转轮机积水仓提供水,小型水泵对水增压提供水冲力,加强推动力,从排水管冲出,清洗贯通管,经过直到触发垫片再次触碰触点垫片,控制系统获得信号,控制小型水泵停止;
37、s44:胶球清洗完成后,电动机二启动同时电动机一反转,收放卡扣齿轮电磁铁启动收起卡扣,驱动电动机二回收连接线,带动胶球装置回收;
38、s45:回收胶球装置时,带动活塞向上推压半齿轮轴会与齿轮轴重新连接,支撑轴会重新回到最高限制位,此时电动机二停止,薄膜填料孔壁清洗完成;
39、s5:待当前图像中所有热点清理完毕后,清污机移动至下一个路径规划点,若存在热点坐标则重复s41-s45的操作,若拍摄图像内无热点坐标,则清污机本体继续沿路径前进,待当前所处圆环清理完成,则移动至下一圆环;重复上述操作直到完成一个周期;
40、s6:清污机每隔1天,重复s1-s5操作;
41、s7:经7天,将清污机从冷却塔中取出,维修保养设备后,继续投入使用。
42、本发明的有益效果是:
43、本发明提出了一种基于红外热成像技术的薄膜填料清污机,利用红外线成像和图像识别技术准确判断填料状态,精确定位目标坐标,精准投放和回收胶球清洗装置,从而实现了无需停机情况下的自动清污作业,节省人力资源,提高经济效益。
- 还没有人留言评论。精彩留言会获得点赞!