一种空冷岛智能测温装置
1.本实用新型涉及火力发电厂技术领域,尤其涉及一种空冷岛智能测温装置。
背景技术:
2.直接空冷技术广泛地应用于北方火力发电厂中。空冷系统的维护费用一般为水冷却系统的20%~30%。空气腐蚀性低,不需要采取任何清垢措施。采用空冷系统还可节省大量工业用水,减少环境污染。
3.机组现有温度测点仅能显示单列散热器凝结水混合后温度,无法显示各单元散热器温度分布,为保证空冷机组安全经济运行,需要完善空冷岛温度场数据。
技术实现要素:
4.为解决现有技术的缺点和不足,提供一种空冷岛智能测温装置,基本上不需要人工操作,能够实现空冷岛每个单元表面自动测温,具有很好的应用前景。
5.为实现本实用新型目的而提供的一种空冷岛智能测温装置,包括有空冷岛三角热交换器、运行轨道和测温仪器,所述运行轨道设置在空冷岛三角热交换器底部,所述测温仪器由小车、红外测温仪、摄像头、定位装置和清洗装置组成,所述小车通过下端的车轮滑行在所述运行轨道上,所述车轮由行走电机控制沿着运行轨道行进,所述小车的上端设置有竖直支架,所述竖直支架上设置有水平支架,所述定位装置、清洗装置、红外测温仪安装于水平支架上,所述定位装置安装于水平支架两端的侧面,用来定位测温仪器的测量位置,所述摄像头安装在竖直支架顶端,用来拍摄空冷岛三角热交换器的表面,所述水平支架由升降机构控制其沿着竖直支架上、下移动,所述水平支架上设置有用以驱动其伸长、收缩的动力机构。
6.作为上述方案的进一步改进,所述运行轨道由直行轨道和弯曲轨道组成。
7.作为上述方案的进一步改进,所述车轮中的两个后车轮分别与一个行走电机连接。当两个行走电机转速相同时,小车直行,当两个电机转速不同时,小车向转速低的行走电机所在方向运动。
8.作为上述方案的进一步改进,所述升降机构包括有设置在小车上的升降电机,所述竖直支架上设置有槽轮,所述升降电机的输出轴与槽轮上套装有皮带,所述水平支架通过固定杆与所述皮带固定连接。通过升降电机转动,控制皮带运动,使水平支架在竖直方向上运动。
9.作为上述方案的进一步改进,所述动力机构包括有设置在竖直支架上的双头电机以及对称设置在双头电机两侧的固定罩,所述双头电机的输出轴螺纹连接有u型架,所述u型架设置在固定罩内,所述u型架的左右两侧壁对称设置有传送皮带,所述传送皮带的两侧分别套装有传动轮,所述传送皮带的内、外两侧分别通过固定块与固定罩、第二u型架连接,所述清洗装置设置在所述第二u型架上。
10.作为上述方案的进一步改进,所述清洗装置安装于水平支架两端的侧面,由高压
喷头和高压喷头阀门组成,用来实现对空冷岛三角热交换器表面进行清洁。
11.作为上述方案的进一步改进,所述红外测温仪安装于水平支架两端的侧面,用来实现对空冷岛三角热交换器相对的两个表面温度测量。
12.本实用新型的有益效果是:
13.与现有技术相比,本实用新型提供的一种空冷岛智能测温装置,
14.1.通过定位装置,能够通过信号线的传递作用在控制侧了解到测温仪器的位置,当测温装置处于初始状况下开始自动地测量空冷岛三角热交换器表面时,先检查电机、定位装置和红外测量仪是否正常,若不正常则检修仪器,若正常,则进行第二步。第二步,竖直支架和水平支架按照固定的速度向下向内运动,每隔1s红外测量仪进行一次测温。第三步,判断定位装置坐标系z位置是否到达最小值,如果没有到达则返回第二步,如果到达则进入第四步。第四步,判断小车是否需要转弯,如果需要则转弯,转弯之后进入第五步,如果不需要则直接进入第五步。第五步,使小车向前移动一步,之后进入第六步。第六步,竖直支架和水平支架按照固定的速度向上向外运动,每隔1s红外测量仪进行一次测温。第七步,判断定位装置坐标系z位置是否到达最大值,如果没有到达则返回第六步,如果到达则进入第八步。第八步,判断小车是否需要转弯,如果需要则转弯,转弯之后进入第九步,如果不需要则直接进入第九步。第九步,使小车向前移动一步。一次测量完成,上述测量工作循环执行。通过上述小车、定位装置、电机、红外测量仪的作用,可以实现自动测量空冷岛三角热交换器。
15.2.通过测温装置可以对指定测量点进行测量。先检查四个电机、定位装置和红外测量仪是否正常,若不正常则检修仪器,若正常,则进行第二步。第二步,判断测量点位于空冷岛三角热交换器三角热交换器的编号除以2是否有余数,若有余数则使用右侧的定位装置,若没有则使用左侧的定位装置,进入第三步。第三步,判断定位装置坐标系x位置是否与被测点坐标系x位置相等,若不等则运动小车到达被测点坐标系x位置,否则进入第四步。第四步,判断定位装置坐标系z位置是否与被测点z相等,若不等则进入第五步,若相等则进入八步。第五步,判断定位装置坐标系z位置是否小于被测点坐标系z位置,不小于被测点则进入第六步,否则进入第七步。第六步,判断定位装置y是否大于被测点y,若不大于则进入第七步,否则移动水平支架到被测点y位置,进入第九步。第七步,移动竖直支架到达被测点坐标系z位置,进入第八步。第八步,判断定位装置y方向是否与被测点y方向相等,若不等则移动水平支架到被测点y位置,否则进入第十步。第九步,移动竖直支架到达被测点坐标系z位置,进入第十步。第十步,通过对应的红外测温仪测量被测点温度。被测点温度测量完成。被测点温度测量完成。通过上述小车、定位装置、电机、红外测量仪的作用,能够自动的测量指定测量点温度。
16.3.通过摄像头拍摄空冷岛三角热交换器表面洁净状况,能够通过信号线将空冷岛三角热交换器表面照片传送到控制器。通过定位装置,通过信号线将测温装置位置反馈给控制器。控制器通过图像处理分析得到污渍位置,当定位装置反馈到测温仪器位于污渍位置时,输出控制信号给高压喷水阀门,高压喷头喷水清洗空冷岛三角热交换器表面。实现清洁空冷岛三角热交换器表面的目的。
附图说明
17.以下结合附图对本实用新型的具体实施方式作进一步的详细说明,其中:
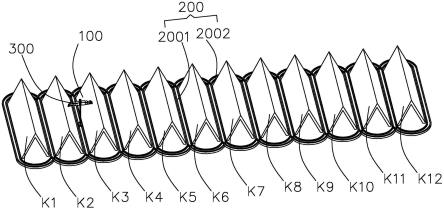
18.图1为本实用新型的结构示意图;
19.图2为本实用新型的测温仪器的结构示意图;
20.图3为图2另一角度下的结构示意图;
21.图4为本实用新型的动力机构的结构示意图;
22.图5为本实用新型的循环测温流程图;
23.图6为本实用新型的指定测温点测温流程图。
具体实施方式
24.如图1-图6所示,本实用新型提供的一种空冷岛智能测温装置,包括有空冷岛三角热交换器100、运行轨道200和测温仪器300,运行轨道200设置在空冷岛三角热交换器100底部,测温仪器300由小车1、红外测温仪2、摄像头3、定位装置4和清洗装置5组成,小车1通过下端的车轮6滑行在运行轨道200上,运行轨道200由直行轨道2001和弯曲轨道2002组成。车轮6由行走电机控制沿着运行轨道200行进,小车1的上端设置有竖直支架7,竖直支架7上设置有水平支架8,定位装置4、清洗装置5、红外测温仪2安装于水平支架8上,其中,红外测温仪2安装于水平支架8两端的侧面,用来实现对空冷岛三角热交换器100相对的两个表面温度测量。定位装置4安装于水平支架8两端的侧面,用来定位测温仪器300的测量位置,清洗装置5安装于水平支架8两端的侧面,由高压喷头51和高压喷头阀门52组成,用来实现对空冷岛三角热交换器100表面进行清洁。摄像头3安装在竖直支架7顶端,摄像头3通过信号线和控制器相连,用来拍摄空冷岛三角热交换器100表面洁净状况,水平支架8由升降机构控制其沿着竖直支架7上、下移动,水平支架8上设置有用以驱动其伸长、收缩的动力机构。
25.进一步改进,车轮6中的两个后车轮分别与一个行走电机连接。当两个行走电机转速相同时,小车1直行,当两个电机转速不同时,小车1向转速低的行走电机所在方向运动。
26.进一步改进,升降机构包括有设置在小车1上的升降电机9,竖直支架7上设置有槽轮10,升降电机9的输出轴与槽轮10上套装有皮带11,水平支架8通过固定杆12与皮带11固定连接。通过升降电机9转动,控制皮带11运动,使水平支架8在竖直方向上运动。
27.进一步改进,动力机构包括有设置在竖直支架7上的双头电机13以及对称设置在双头电机13两侧的固定罩14,双头电机13的输出轴螺纹连接有u型架15,u型架15设置在固定罩14内,u型架15的左右两侧壁对称设置有传送皮带16,传送皮带16的两侧分别套装有传动轮17,传送皮带16的内、外两侧分别通过固定块18与固定罩14、第二u型架19连接,清洗装置5设置在第二u型架19上。通过双头电机13工作,带动输出轴、u型架15前后移动,由于传送皮带16的外侧通过固定块18与固定罩14连接,在u型架15运动的时候,会带动与传送皮带16通过固定块18连接的第二u型架19运动,来实现水平支架8的伸缩、拉长。
28.本实用新型在自动测温工作时:先检测所有的定位装置4,所有电机,红外测温仪2是否正常,若不正常,则开始检修仪器,若正常,初始化测温仪器300,若测温仪器300初始化完成,则升降电机9、动力机构控制水平支架8按照固定速率向下向内运动,当定位装置4的z方向(也就是竖直方向)到达最小值,则判断小车1是否需要转弯,若需要则转弯,否则向前运行一步,小车1运行一步完成后,升降电机9、动力机构控制水平支架8按照固定速率向上向外运动,当定位装置4的z方向(也就是竖直方向)到达最大值,则判断小车1是否需要转弯,若需要则转弯,否则向前运行一步。在自动测温过程中,循环上述步骤。
29.本实用新型在测量指定点温度工作时:先检测所有的定位装置4,所有电机,红外测温仪2是否正常,若不正常,则开始检修仪器。根据被测点所在空冷岛三角热交换器100的k的编号,确定所用的定位装置4,根据定位装置4与被测点位置,通过电机移动测温装置的小车1,竖直支架7,水平支架8,到达被测点位置,配套的红外测温仪2测量被测点温度。完成对指定点温度的测量。
30.另外检测过程中,先检测所有的定位装置4,所有电机,红外测温仪2是否正常,若不正常,则开始检修仪器否则进行第二步。
31.第二步,判断测量点位于空冷岛三角热交换器100的k的编号除以2是否有余数,若没有余数则使用右侧的定位装置4,若有则使用左侧的定位装置4,进入第三步。
32.第三步,判断定位装置的坐标系x位置是否与被测点x相等,若不等则运动小车1到达被测点坐标系x位置,否则进入第四步。
33.第四步,判断定位装置的坐标系z位置是否与被测点坐标系z相等,若不等则进入第五步,若相等则进入八步。
34.第五步,判断定位装置的坐标系z位置是否小于被测点坐标系z位置,不小于被测点则进入第六步,否则进入第七步。
35.第六步,判断定位装置的坐标系y是否大于被测点坐标系y,若不大于则进入第七步,否则移动水平支架8到被测点y坐标系位置,进入第九步。
36.第七步,移动竖直支架7到达被测点坐标系z位置,进入第八步。
37.第八步,判断定位装置4的坐标系y方向是否与被测点坐标系y方向相等,若不等则移动水平支架8到被测点坐标系y位置,否则进入第十步。
38.第九步,移动竖直支架7到达被测点坐标系z位置,进入第十步。
39.第十步,通过对应的红外测温仪2测量被测点温度。被测点温度测量完成。
40.本使用新型在工作情况中,摄像头3拍摄被测空冷岛三角热交换器100的k的两个表面,通过信号线传给控制器,控制器经过图像处理分析得到有污渍的位置,在自动测温工作时当定位装置4到达有污渍位置时,通过控制清洗装置5的阀门控制高压喷嘴喷水清洗。
41.通过上述轨道和测温仪器300的作用,能够自动的测量空冷岛表面温度,能够对空冷岛表面进行清洗。
42.以上实施例不局限于该实施例自身的技术方案,实施例之间可以相互结合成新的实施例。以上实施例仅用以说明本实用新型的技术方案而并非对其进行限制,凡未脱离本实用新型精神和范围的任何修改或者等同替换,其均应涵盖在本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1