极片清洗视觉检测设备的制作方法
1.本实用新型涉及清洗检测设备,尤其涉及极片清洗视觉检测设备。
背景技术:
2.常规制作锂离子电池的步骤常包括:1、在电池极片的铝箔基体上焊接极耳,其中,由于现有的电池极片包括箔基体和涂覆在箔体表面的涂层,因此,在焊接极耳之前需要清洗掉电池极片上的涂层,使其暴露出箔体才可进行焊接;2、在涂层清除之后需要进行视觉检测以判断涂层刮除是否合格;然而,现有的极片清洗视觉检测设备由于在激光清洗过程中存在较高的温度,导致其可适用于箔体为铜箔的电池极片,而不适用于箔体为铝箔的电池极片,因此,亟需一种适用于箔体为铝箔的极片的涂层清洗和视觉检测的极片清洗视觉检测设备。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的在于提供极片清洗视觉检测设备,其可适用于箔体为铝箔的极片的涂层清洗和视觉检测。
4.本实用新型的目的采用如下技术方案实现:
5.极片清洗视觉检测设备,包括
6.两个极片清洗装置;两个所述极片清洗装置用于分别对极片的正、反两面的涂层进行清洗;所述极片清洗装置包括工作台、刮刀、刮刀驱动机构和喷洒机构;所述工作台的顶面形成为用于承托极片的水平承托面;所述喷洒机构用于往所述水平承托面上的极片的涂层喷洒溶解剂;所述刮刀驱动机构用于带动所述刮刀运动,以使所述刮刀将喷洒过溶解剂的涂层刮除;
7.粉尘清除机构;所述粉尘清除机构用于清除极片上的粉尘;
8.视觉检测机构;所述视觉检测机构用于检测涂层清洗是否合格;
9.贴标机构;所述贴标机构用于往极片上粘贴标签;
10.机架;
11.放卷辊;所述放卷辊枢接在所述机架上,并用于供极片卷绕;
12.导引辊组件;所述导引辊组件用于接收从所述放卷辊导引出的极片,并导引极片依次经过两个所述水平承托面、粉尘清除机构、视觉检测机构和贴标机构;
13.收卷辊;所述收卷辊枢接在所述机架上,并用于接收从所述导引辊组件牵引出的极片。
14.进一步地,所述视觉检测机构位于所述贴标机构上方;所述视觉检测机构和所述贴标机构之间还设置有调节机构;所述调节机构用于调整极片从所述视觉检测机构运动至所述贴标机构之间的路径;所述调节机构包括调整辊和水平驱动结构,所述调整辊用于供位于所述视觉检测机构和所述贴标机构之间极片绕设;所述水平驱动结构用于带动所述调整辊沿水平方向运动。
15.进一步地,所述极片清洗视觉检测设备还包括压紧机构;所述压紧机构包括压紧辊和连接杆;所述压紧辊枢接在所述连接杆上;所述连接杆安装在所述机架,并可在所述连接杆和所述压紧辊的自重下相对所述机架转动,以带动所述压紧辊向贴合于所述收卷辊的方向运动。
16.进一步地,所述极片清洗装置还包括夹紧驱动结构和两块夹紧板;两块所述夹紧板间隔分置于所述水平承托面的相对两侧;各所述夹紧板均用于与所述水平承托面配合夹紧极片;所述夹紧驱动结构用于分别驱动两块所述夹紧板升降。
17.进一步地,所述工作台上开设有位于所述水平承托面下方的吸附腔;所述水平承托面上还开设有连通所述吸附腔和外部的吸附孔。
18.进一步地,各所述极片清洗装置均对应设置有残料清除装置;所述残料清除装置包括安装座、动力机构、两块联动板和两块刮板;两块所述联动板分别安装在所述安装座上,并可彼此靠近或远离;两块所述刮板与两块所述联动板一一对应设置,且各所述刮板可移动地安装在对应所述联动板上;对应设置的所述联动板和所述刮板之间通过弹性结构连接;所述动力机构用于带动两块所述联动板彼此靠近或远离,以使两块所述联动板通过所述弹性结构联动两块所述刮板彼此靠近或远离;两块所述刮板彼此靠近时能够分别抵于所述刮刀的相对两刀背;所述弹性结构的两端分别安装在对应所述刮板和所述联动板上,并在对应所述刮板抵于所述刮刀的刀背时被压缩,以提供促使对应所述刮板向另一所述刮板方向运动的弹性应力;所述刮刀驱动机构还用于将所述刮刀移送至两块所述刮板之间,并带动所述刮刀相对所述刮板向上移动。
19.进一步地,所述联动板上开设有贯穿其相对两端面的水平插装槽;所述刮板匹配插装于对应所述水平插装槽内,且所述刮板靠近另一所述刮板的一端伸出所述水平插装槽外;所述刮板位于所述水平插装槽内的部位开设有贯穿其上下两面的腰型槽;所述弹性结构包括推杆和弹簧;所述推杆设置在所述水平插装槽内,所述推杆的一端固定在所述水平插装槽的槽壁上,另一端活动伸入所述腰型槽内;所述弹簧设置于对应所述刮板的所述腰型槽内,所述弹簧远离另一所述刮板的一端抵在所述推杆上,所述弹簧靠近另一所述刮板的一端抵在所述腰型槽的槽壁上。
20.进一步地,所述残料清除装置还包括吸料管、抽风机、吹气管和送风机、以及位于两块所述刮板正下方的收料槽;所述吹气管和所述吸料管分置于所述收料槽的相对两侧;所述吸料管的一端与所述收料槽连通,所述吸料管的另一端用于与所述抽风机的进气口连通;所述吹气管的一端与所述收料槽连通,另一端用于与所述送风机的出风口连通。
21.进一步地,所述残料清除装置还包括位于所述刮板上方的定位板;所述定位板上开设有贯通其上下两面并供刮刀进出的进出通道;两块所述刮板能够抵于穿过所述进出通道的刮刀的刀背。
22.进一步地,所述刮刀驱动机构包括安装架、丝杆、丝杆螺母、旋转电机和音圈电机;所述丝杆水平枢接在所述安装架上;所述丝杆螺母匹配套装在所述丝杆上,并可沿所述丝杆长度方向运动地安装在所述安装架上;所述旋转电机的输出轴与所述丝杆传动连接;所述音圈电机的机体安装在所述丝杆螺母上;所述音圈电机的输出轴与所述刮刀传动连接并在运动时带动所述刮刀升降。
23.相比现有技术,本实用新型的有益效果在于:
24.本实用新型通过设置机架、放卷辊、导引辊组件、收卷辊和两个所述极片清洗装置,其中,极片清洗装置包括形成有水平承托面的工作台、刮刀、刮刀驱动机构和喷洒机构;使用时,通过放卷辊、导引辊组件和收卷辊配合使极片经过水平承托面,喷洒机构往水平承托面上的极片的涂层喷洒溶解剂,之后刮刀驱动机构带动刮刀运动从而可将极片上喷洒过溶解剂的涂层刮除,完成涂层清洗,该过程中可避免采用激光清洗机清洗时高温的问题,从而适用于箔体为铝箔的电池极片的清洗;同时配合设置粉尘清除机构、视觉检测机构和贴标机构;使得经极片清洗装置清洗的极片依次经过粉尘清除机构进行粉尘的清除以确保视觉检测的准确度、之后可进入视觉检测机构进行外观进行检测从而判断极片合格与否,再配合贴标机构在不合格的极片贴上标签,从而实现极片的视觉检测。
附图说明
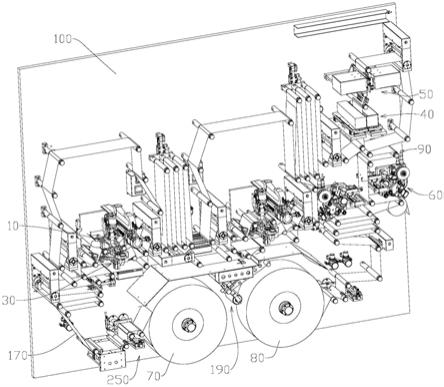
25.图1为本实用新型极片清洗视觉检测设备的结构示意图;
26.图2为本实用新型极片清洗装置和残料清除装置的结构示意图(除去抽风管);
27.图3为本实用新型极片清洗装置的结构示意图;
28.图4为本实用新型极片清洗装置的结构示意图(除去抽风管);
29.图5为本实用新型残料清除装置的组装结构示意图;
30.图6为本实用新型残料清除装置的拆分结构示意图;
31.图7为本实用新型残料清除装置的剖视图;
32.图8为本实用新型刮刀的结构示意图;
33.图9为本实用新型压紧机构的结构示意图之一;
34.图10为本实用新型压紧机构的结构示意图之二;
35.图11为本实用新型视觉检测机构的结构示意图;
36.图12为本实用新型粉尘清除机构的结构示意图;
37.图13为本实用新型贴标机构的结构示意图;
38.图14为本实用新型放卷辊、旋转驱动机构和轴套的结构示意图;
39.图15为本实用新型纠偏机构的结构示意图。
40.图中:10、极片清洗装置;11、工作台;111、水平承托面;12、刮刀;121、刀背;13、刮刀驱动机构;131、安装架;132、丝杆;133、旋转电机;134、音圈电机;14、喷洒机构;15、夹紧驱动结构;151、第一伸缩气缸;152、传动板;16、夹紧板;20、导向杆;30、残料清除装置;31、安装座;32、联动板;321、水平插装槽;33、刮板;331、腰型槽;34、动力机构;35、弹性结构;351、弹簧;352、推杆;40、视觉检测机构;41、ccd检测器;50、粉尘清除机构;51、壳体;52、毛刷辊;53、侧进口;54、吸气管;60、贴标机构;61、放卷轮;62、收卷轮;63、承压辊;64、压标辊;65、起标块;70、放卷辊;80、收卷辊;90、调整辊;100、机架;110、定位板;1111、进出通道;120、收料槽;130、吸料管;140、吹气管;150、抽风管;160、吸附孔;170、极片;180、标签带;190、压紧机构;191、压紧辊;192、连接杆;193、旋转驱动结构;1931、第二伸缩气缸;1932、第一传动杆;1933、第二传动杆;200、旋转驱动机构;210、轴套;220、校准刻线;230、限位槽;240、限位块;250、纠偏机构;251、光纤传感器;252、接收辊;253、连接座;254、直线驱动结构。
具体实施方式
41.如图1
‑
4和图8所示,极片清洗视觉检测设备,包括
42.两个极片清洗装置10;两个极片清洗装置10用于分别对极片170的正、反两面的涂层进行清洗;具体,极片清洗装置10包括工作台11、刮刀12、刮刀驱动机构13和喷洒机构14;工作台11的顶面形成为用于承托极片170的水平承托面111;喷洒机构14用于往水平承托面111上的极片170的涂层喷洒溶解剂,溶解剂可选用市场可直接采购获得的nmp溶解剂;刮刀驱动机构13用于带动刮刀12运动,以使刮刀12将喷洒过溶解剂的涂层刮除;如此,采用喷洒机构14往极片170的涂层喷洒溶解剂,并配合刮刀驱动机构13带动刮刀12将喷洒过溶解剂的涂层刮除,从而实现极片170的涂层的清洗,可避免采用激光清洗机清洗时高温的问题,从而适用于箔体为铝箔的电池极片170的清洗;上述需要说明的是,在极片170通过第一个水平承托面111时,可使极片170的正面朝向刮刀12,而在经过第二个水平承托面111时,使极片170的反面朝向刮刀12,如此,可实现两个极片清洗装置10对极片170正、反两面的涂层清洗;
43.粉尘清除机构50;粉尘清除机构50用于清除极片170上的粉尘,以便于后期进行检测;
44.视觉检测机构40;视觉检测机构40用于检测涂层清洗是否合格,完成极片170的视觉检测;具体,在两个极片清洗装置10对极片170的涂层进行清洗后,采用可视觉检测机构40对极片170的涂层清洗是否合格进行检测,即,对清洗涂层后暴露出的箔体部位的形状及位置与预设标准外观进行比较,从而得知涂层清除是否合格,以排除清洗不合格的极片170,从而确保质量;
45.贴标机构60;贴标机构60用于往极片170上粘贴标签;这样,在视觉检测机构40判断出极片170不合格时,可在不合格的极片170上粘贴标签,以便后期进行排除;
46.机架100;
47.放卷辊70;放卷辊70枢接在机架100上,并用于供极片170卷绕,此处的极片170为涂层未经清洗的极片170;
48.导引辊组件;导引辊组件用于接收从放卷辊70导引出的极片170,并导引极片170依次经过两个水平承托面111、粉尘清除机构50、视觉检测机构40和贴标机构60,从而便于上述各机构对极片170进行相应操作;
49.收卷辊80;收卷辊80枢接在机架100上,并用于接收从导引辊组件牵引出的极片170,即,收卷辊80接收经两个极片清洗装置10、粉尘清除机构50、视觉检测机构40和贴标机构60处理后的极片170。
50.在上述结构的基础上,可实现对箔体为铝箔的极片170的涂层清洗、灰尘清除、视觉检测并对极片170不合格品进行贴标的操作。
51.上述需要说明的是,上述极片170的正面和极片170的反面是指极片170相对的两面,并不特指极片170的具体一面。
52.上述的喷洒机构14可采用但不仅限于喷壶。
53.为避免在刮除极片170的涂层时,极片170相对水平承托面111移动,如图2和图4所示,本实用新型还提供了以下两种实施方式:
54.实施方式一:极片清洗装置10还包括夹紧驱动结构15和两块夹紧板16;两块夹紧
板16间隔分置于水平承托面111的相对两侧,此处,两夹紧板16之间的距离能够容置需刮除的涂层;各夹紧板16均用于与水平承托面111配合夹紧极片170;夹紧驱动结构15用于分别驱动两块夹紧板16升降;这样,通过带动夹紧板16下降可与水平承托面111配合夹紧极片170,并在带动夹紧板16上升时可解除对极片170的固定。
55.优选地,各夹紧板16均对应设置有导向结构;导向结构包括分置于对应夹紧板16相对两端的两导向杆20,设置两导向杆20使导向更稳定;导向杆20活动穿设于工作台11上。
56.上述的夹紧驱动结构15包括与两块夹紧板16一一对应设置的两组驱动单元;驱动单元包括第一伸缩气缸151和传动板152,第一伸缩气缸151的缸体安装在工作台11上,第一伸缩气缸151的伸缩杆与传动板152传动连接;两根导向杆20安装在对应传动板152上。
57.实施方式二:工作台11上开设有位于水平承托面111下方的吸附腔;水平承托面111上还开设有连通吸附腔和外部的吸附孔160;如此,通过外部抽气机连通吸附腔,从而在吸附孔160的位置形成负压,将极片170吸附固定在水平承托面111上,从而进一步对极片170加强固定。
58.上述的实施方式一和实施方式二可择一设置,也可两者同时设置以具有更好的固定效果;在实施方式一和实施方式二同时设置时,具体,吸附孔160位于两块夹紧板16之间。
59.如图3所示,进一步地,极片清洗装置10还包括抽风机构;抽风机构包括抽风管150和吸风机;抽风管150的一端形成为进料端,进料端水平朝向水平承托面111;抽风管150的另一端与吸风机的进风口连通。
60.为在下一次刮除涂层时,降低粘附在刮刀12上的涂层残料隔离刮刀12和极片170的涂层的可能,如图2和图5
‑
7所示,优选地,各极片清洗装置10均对应设置有残料清除装置30;残料清除装置30包括安装座31、动力机构34、两块联动板32和两块刮板33;两块联动板32分别安装在安装座31上,并可彼此靠近或远离;两块刮板33与两块联动板32一一对应设置,且各刮板33可移动地安装在对应联动板32上;对应设置的联动板32和刮板33之间通过弹性结构35连接;动力机构34用于带动两块联动板32彼此靠近或远离,以使两块联动板32通过弹性结构35联动两块刮板33彼此靠近或远离;此处,可以理解的是,动力机构34带动两块联动板32彼此靠近时,联动板32通过对应的弹性结构35带动对应的刮板33运动,并使两块刮板33彼此靠近;同理,动力机构34带动两块联动板32彼此远离时,联动板32通过对应的弹性结构35带动对应的刮板33运动,并使两块刮板33彼此远离;两块刮板33彼此靠近时能够分别抵于刮刀12的相对两刀背121;弹性结构35的两端分别安装在对应刮板33和联动板32上,并在对应刮板33抵于刮刀12的刀背121时被压缩,以提供促使对应刮板33向另一刮板33方向运动的弹性应力;刮刀驱动机构13还用于将刮刀12移送至两块刮板33之间,并带动刮刀12相对刮板33向上移动。
61.在上述结构的基础上,使用时,如此,在每次完成极片170的清洗后或者刮刀12上存在较多涂层残料时,可通过刮刀驱动机构13带动刮刀12移动至两刮板33之间,动力机构34驱动两块联动板32彼此靠近,两块联动板32通过弹性结构35联动两块刮板33彼此靠近,并使两块刮板33分别抵于刮刀12的两刀背121,且使两个弹性结构35均处于被压缩状态;此时,在刮刀12向上运动过程中,随着刮刀12厚度的变薄(如图6所示,刮刀12的厚度从其远离刀刃的一侧至刀刃的方向变薄),弹性结构35促使对应刮板33向另一刮板33方向运动,即,两个弹性结构35促使两块刮板33彼此靠近,而使得刮板33始终抵于刮刀12的刀背121,从而
提高残料清除效果,之后再进行下一次的极片170的涂层清洗,从而具有较好的涂层清洗效果。
62.再者,在刮刀12脱离两刮板33时,两刮板33能够在弹性结构35作用下闭合,从而将粘附在刮刀12的刀刃位置的涂层残料与刮刀12切离,从而进一步提高残料清除效果,即,可进一步提高刮刀12的清洁程度,而提高涂层清洗效果。
63.具体地,联动板32的底面开设有导槽;安装座31的顶面设置有与导槽活动且插装配合的导轨。
64.如图5
‑
7所示,进一步地,联动板32上开设有贯穿其相对两端面的水平插装槽321;刮板33匹配插装于对应水平插装槽321内,且刮板33靠近另一刮板33的一端伸出水平插装槽321外,从而完成刮板33的可移动安装;可以理解地是,联动板32的运动方向、刮板33的运动方向以及水平插装槽321的延伸方向均相同。
65.更进一步地,刮板33位于水平插装槽321内的部位开设有贯穿其上下两面的腰型槽331;弹性结构35包括推杆352和弹簧351;推杆352设置在水平插装槽321内,推杆352的一端固定在水平插装槽321的槽壁上,另一端活动伸入腰型槽331内;弹簧351设置于对应刮板33的腰型槽331内,弹簧351远离另一刮板33的一端抵在推杆352上,弹簧351靠近另一刮板33的一端抵在腰型槽331的槽壁上;使用时,动力机构34驱动两块联动板32彼此靠近时,联动板32通过推杆352推动弹簧351,弹簧351推动腰型槽331的槽壁而推动刮板33,在该过程中,弹簧351被压缩而提供推动刮板33的弹性应力,可降低动力机构34所需提供的推力,即可降低动力机构34的能源损耗;之后,在刮板33抵于刮刀12的刀背121后可继续带动两块联动板32彼此靠近,从而使弹簧351具有足够的压缩量,即,使得弹簧351具有足够的弹性应力以在刮刀12向上运动过程中推动刮板33,从而使刮板33始终抵于刮刀12的刀背121;而在动力机构34驱动两块联动板32彼此远离时,联动板32联动推杆352,推杆352抵推腰型槽331的槽壁而带动两刮板33彼此远离。
66.上述结构中,腰型槽331的槽口便于弹性结构35的安装;再者,刮板33插装于联动板32的水平插装槽321内,腰型槽331开设在水平插装槽321内,且弹簧351设置在腰型槽331内,此时,水平插装槽321的槽壁封挡腰型槽331的槽口,从而避免弹簧351脱离腰型槽331。
67.为便于收集残料,优选地,残料清除装置30还包括位于两块刮板33正下方的收料槽120,直接收集从刮刀12掉落的残料;更优选地,残料清除装置30还包括吸料管130和抽风机;吸料管130的一端与收料槽120连通,吸料管130的另一端用于与抽风机的进气口连通,抽取收料槽120内的空气,可吸取收料槽120内的残料,也可直接抽取刮刀12上的残料。
68.进一步地,残料清除装置30还包括吹气管140和送风机;吹气管140和吸料管130分置于收料槽120的相对两侧;吹气管140的一端与收料槽120连通,另一端用于与送风机的出风口连通,如此,边吹边抽,进一步可提高残料清除效果。
69.为了更快速的确定刮刀12放置位置,进一步地,残料清除装置30还包括位于刮板33上方的定位板110,具体,定位板110固定在安装座31上;定位板110上开设有贯通其上下两面并供刮刀12进出的进出通道1111;通过设置进出通道1111,可直接确定刮刀12的位置;两块刮板33能够抵于穿过进出通道1111的刮刀12的刀背121,可以理解地是,在设置联动板32和刮板33的位置时,以在两块刮板33彼此靠近时能同时抵于进出通道1111内的刮刀12的两刀背121为准。
70.如图4所示,具体地,刮刀驱动机构13包括安装架131、丝杆132、丝杆螺母、旋转电机133和音圈电机134;丝杆132水平枢接在安装架131上;丝杆螺母匹配套装在丝杆132上,并可沿丝杆132长度方向运动地安装在安装架131上;旋转电机133的输出轴与丝杆132传动连接;音圈电机134的机体安装在丝杆螺母上;音圈电机134的输出轴与刮刀12传动连接并在运动时带动刮刀12升降;这样,通过音圈电机134将刮刀12下降至能够与极片170的涂层贴合的位置,配合旋转电机133、丝杆132和丝杆螺母带动音圈电机134水平移动,即,联动刮刀12水平移动,从而可将涂层刮除;同时,在旋转电机133、丝杆132和丝杆螺母带动音圈电机134水平移动,可将刮刀12移动至刮板33处,之后在音圈电机134带动下将刮刀12下降至两刮板33之间,并在刮板33抵于刮刀12的刀背121后,通过音圈电机134可带动刮刀12向上运动,结构简单易实现。
71.上述需要说明的是,由于水平承托面111存在加工误差或者丝杆132的安装存在安装误差,可能导致水平承托面111或丝杆132存在倾斜的情况,此处,采用音圈电机134带动刮刀12升降,若存在倾斜问题而导致刮刀12作用于涂层的力不均衡时,刮刀12受到的反作用力传递至音圈电机134,音圈的自调整系统能够自动调整刮刀12的高度,从而使得刮刀12能以均衡的力作用于涂层,避免力度过大导致刮坏极片170。
72.值得一提地是,丝杆螺母上还安装有高度检测传感器,高度检测传感器的检测端朝向水平承托面111,从而可检测出高度检测传感器与水平承托面111之间的距离数值,并可将距离数值发送至后台,通过距离数值是否发生改变或者距离数值改变的趋势,来判断水平承托面111与丝杆132之间是否相互倾斜,以便于对本电池极片170清洗设备进行修整。
73.由于在极片170进入视觉检测时极片170需要保持静止状态以供获得极片170外观,而此时,若不及格的极片170未到达合适的贴标位置时,则影响贴标,且在贴标机构60过程中则需要极片170处于运动状态,如此,正常情况下两种操作需要分时间段进行,为了提高效率,如图1所示,优选地,视觉检测机构40位于贴标机构60上方;视觉检测机构40和贴标机构60之间还设置有调节机构;调节机构用于调整极片170从视觉检测机构40运动至贴标机构60之间的路径,即,调节机构用于调整极片170从视觉检测机构40移动至贴标机构60之间的距离;具体地,调节机构包括调整辊90和水平驱动结构,调整辊90用于供位于视觉检测机构40和贴标机构60之间极片170绕设;水平驱动结构用于带动调整辊90沿水平方向运动。
74.在上述结构的基础上,从放卷辊70引出的极片170经过视觉检测机构40,绕设于调整辊90之后卷绕至收卷辊80上,此时,通过水平驱动结构在水平方向上移动调整辊90,即带动调整辊90左右移动,从而极片170的路径,即,改变极片170从视觉检测机构40至贴标机构60的距离,如此,假设极片170绕过调整辊90的右侧,而在不合格的极片170未到达贴标位置,此时,采用水平驱动结构带动调整辊90向左运动,如此,穿过视觉检测机构40的极片170还可继续被收卷辊80收卷而进行运动,从而将不合格的极片170移动至合适的贴标位置,并进行贴标操作。
75.上述的水平驱动结构可采用直线电机等等。
76.如图12所示,进一步地,粉尘清除机构50包括两个除尘结构;除尘结构包括壳体51、毛刷辊52和电机;壳体51安装在机架100上,并开设有吸气口,吸气口连接有吸气管54;壳体51还开设有侧进口53;毛刷辊52枢接在壳体51内,且毛刷辊52的刷丝伸出侧进口53外;电机用于带动毛刷辊52旋转;两根毛刷辊52的刷丝之间间隔形成供极片170穿过的间隙;如
此,在极片170经过两根毛刷辊52时,毛刷辊52的刷毛与极片170接触,电机带动毛刷辊52旋转,实现对极片170上粉尘、杂质的清除,以便于后续进行检测;同时,吸气管54与外部抽风机连通,通过开启外部抽风机,可将清除的粉尘吸走,减少对环境的污染。
77.如图11所示,具体地,视觉检测机构40包括计算机和两个ccd检测器41;两个ccd检测器41的镜头相对设置,且两个ccd检测器41的镜头之间形成供极片170穿过的空隙;通过ccd检测器41拍摄获取极片170的外观,并发送至计算机,计算机将接收到的外观与其内部设定的外观进行比对,即可实现对极片170露出的箔体的位置及形状等是否合格进行检测。
78.上述的贴标机构60可采用以下的实施方式实现:如图13所示,贴标机构60包括放卷轮61、收卷轮62、承压辊63、压标辊64和锲型的起标块65;放卷轮61用于供标签带180卷绕,收卷轮62用于接收从放卷轮61引出的标签带180;起标块65用于供位于收卷轮62和放卷轮61之间的标签带180绕设;压标辊64位于承压辊63上方,压标辊64与承压棍均枢接在机架100上,位于起标块65的同一侧,且两者之间用于供经过粉尘清除机构50的极片170带穿过。
79.在上述结构的基础上,卷绕标签带180时,从放卷轮61引出的标签带180先经过起标块65的上方,并起标块65的下方后绕设在收卷轮62上,且标签带180的标签背向起标块65,如此,标签带180在运动时,标签在运动至起标块65的位置时由于标签较硬从而一端脱离标签带180,此时,脱离标签带180的标签正好位于极片170上方,并随着标签带180继续运动,标签被推动至压标辊64和承压辊63之间,从而压紧在极片170上。
80.进一步地,上述的压标辊64可通过弹簧351安装在机架100上,从而实现压力的调节。
81.在放卷过程中,由于极片170受到不断的牵引导致其在放卷辊70的轴向上的位置发生偏移,而不利于后续其他机构进行相应操作,因此,如图14所示,本极片清洗视觉检测设备还包括旋转驱动机构200、轴套210和直线驱动机构;轴套210可绕其中心轴线旋转地安装在机架100上;旋转驱动机构200用于带动轴套210旋转;放卷辊70穿设在轴套210内,与轴套210周向固定且轴向可相对运动;直线驱动机构用于带动放卷辊70沿其的轴向运动;如此,可实现放卷辊70的直线运动和周向旋转;再者,放卷辊70穿设在轴套210内,使结构更紧凑,且旋转驱动机构200和直线驱动机构之间的运作互不干扰,即旋转驱动机构200和直线驱动机构之间不需要驱动彼此运作,从而节省能源。
82.具体地,如图14所示,轴套210上开设有沿其轴向延伸的限位槽230;放卷辊70上固定限位块240;限位块240与限位槽230活动配合,从而实现放卷辊70可沿轴向运动,限位块240还与限位槽230插装配合,从而限制放卷辊70相对轴套210旋转。
83.为实现极片170位置调整的自动化操作,如图1和图15所示,本极片清洗视觉检测设备还包括纠偏机构250;纠偏机构250包括光纤传感器251、控制器和接收辊252;接收辊252枢接在机架100上,并用于接收从放卷辊70牵引出的极片170;光纤传感器251用于检测极片170在接收辊252轴向上的位置信号,并将位置信号发送至控制器;控制器用于根据位置信号控制直线驱动机构的运作;可以理解的是,控制器内设置设定有初始位置的位移值a1,控制器在接收到的位置信号为位移值a2,通过比较a1和a2,在两者不相同时,根据两者的差值c控制直线驱动机构带动极片170运动差值c的距离;比如,初始位置的位移值a1为极片170远离机架100的边缘与机架100之间的标准距离,相应地,光纤传感器251检测的位置信号(位移值a2)则是极片170远离机架100的边缘与机架100之间的实际距离。
84.为了对光纤传感器251的初始位置进行确定,接收辊252上设置有校准刻线220,纠偏机构250还包括连接座253和直线驱动结构254;光纤传感器251安装在连接座253上;直线驱动结构254用带动连接座253运动以联动光纤传感器251沿放卷辊70的轴向运动;如此,在安装极片170时,将极片170远离机架100的边缘与校准刻线220对准,此时,通过直线驱动结构254带动连接座253以联动光纤传感器251,使得光纤传感器251检测到的位置信号(位移值a2)等于位移值a1,即可对光纤传感器251的初始位置进行确定。
85.上述的光纤传感器251为现有部件,其可采用型号为mkm
‑
1140、e20423 ft
‑
00
‑
p
‑
a
‑
m6的光纤传感器251。
86.上述的直线驱动机构可采用直线电机等等。上述的旋转驱动机构200可采用电机、旋转液缸等等。
87.为使收卷后极片170缠绕紧实,如图1和图9
‑
10所示,优选地,本极片清洗视觉检测设备还包括压紧机构190;压紧机构190包括压紧辊191和连接杆192;压紧辊191枢接在连接杆192上;连接杆192安装在机架100,并可在连接杆192和压紧辊191的自重下相对机架100转动,以带动压紧辊191向贴合于收卷辊80的方向运动。如此,在收卷辊80收卷极片170过程中,压紧辊191始终向收卷辊80的方向压紧极片170,从而可消除极片170之间的空隙,使得收卷于收卷辊80上的极片170缠绕紧实,避免造成浪费。
88.再者,压紧辊191枢接在连接杆192上,可降低压紧辊191与极片170之间的摩擦。
89.进一步地,压紧机构190还包括旋转驱动结构193;旋转驱动结构193用于驱动连接杆192旋转,此时,可通过旋转驱动结构193带动连接杆192旋转而联动压紧辊191远离极片170,从而便于将收卷完成的极片170移出本极片清洗视觉检测设备。
90.具体地,旋转驱动结构193包括第二伸缩气缸1931、第一传动杆1932和第二传动杆1933;第二伸缩气缸1931的缸体铰接在机架100上,第一传动杆1932的一端与第二伸缩气缸1931的伸缩杆传动连接;第二传动杆1933的另一端与第二传动杆1933的一端铰接;第二传动杆1933安装在机架100上,并可绕其中心轴线旋转;连接杆192与第二传动杆1933的另一端固定连接;如此,通过第二伸缩气缸1931的伸缩杆的伸缩,带动第一传动杆1932旋转,第一传动杆1932旋转联动第二传动杆1933旋转,从而带动连接杆192转动,通过第一传动杆1932和第二传动杆1933传递第二伸缩气缸1931的动力,使得驱动更稳定;当然,上述的旋转驱动结构193也可采用电机或旋转液缸,比如,采用电机的输出轴与连接杆192传动。
91.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1