一种拽引式管道清洁机器人的制作方法
1.本实用新型涉及管道机器人领域,更具体地涉及一种拽引式管道清洁机器人。
背景技术:
2.目前,随着生活质量的提高,大多数楼宇都安装有中央空调,中央空调的风管长期不清洗,管内会滋生多种细菌,极易引发各种呼吸道疾病。为了使室内的空气保持洁净,风管的清洗越来越受到重视。目前,清洗方法主要是将风管每隔一段距离破开一个口子,投入清洁机器人进入风管内部,清洁机器人携有除尘装置,将管壁内的灰尘及污物清扫并收集至集尘盒内。由于清洁机器人行驶中需要克服毛刷与壁面产生的阻力,所需要的的牵引力非常大,但是风管的特殊部位相对水平面会产生一定的斜坡,并且风管由铁皮制成,壁面非常光滑,造成抓地力不足,极易在风管内打滑,导致机器人在风管中失去控制,清洁效果大打折扣。为满足机器人可控,因此市场上大多数机器人清洗风管的最大长度在30米左右,方便机器人在失控时可人工干预,管道清洗长度已经成为了传统清扫机器人作业的瓶颈。这直接导致了风管破开口子之间的距离非常短且密集,工程量大,作业强度高且效率低。
技术实现要素:
3.本实用新型的目的是提供一种拽引式管道清洁机器人,从而解决现有技术中一体式管道清洁机器人作业距离短、行驶途中易打滑的问题。
4.为了解决上述技术问题,本实用新型采用以下技术方案:
5.提供一种拽引式管道清洁机器人,包括:驱动模块,包括:移动底盘、自动缆盘以及排绳器,所述自动缆盘与排绳器安装于所述移动底盘上;管道清洁机构;以及缆绳,所述缆绳依次缠绕于所述自动缆盘与排绳器上,进而与所述管道清洁机构连接;其中,所述管道清洁机构在缆绳的拽引下实现对管道的清洁。
6.优选地,所述移动底盘通过步进电机驱动实现自身移动。
7.优选地,所述移动底盘底部设有滚轮或履带。
8.优选地,所述管道清洁机构包括:车体,设置于所述车体上的底盘刷模块、前滚刷模块、前负压吸尘箱、侧盘刷模块、后滚刷模块、后负压吸尘箱、以及顶盘刷模块。
9.根据本实用新型提供的一种拽引式管道清洁机器人,其工作原理为:在管道中驱动模块和管道清洁机构之间通过缆绳连接,驱动模块从管道的一个开口处向下一个开口处移动,并且在移动过程中释放缆绳,由于缆绳的一端与管道清洁机构相连,因此驱动模块移动过程中,自动缆盘正向旋转向外放出缆绳,实现边行驶边放缆的功能,自动缆盘反向旋转可收纳缆绳,实现边行驶边收缆的功能,缩短驱动模块与管道清洁机构之间的距离,实现作业距离的自由调节。当驱动模块停靠到某一位置后,管道清洁机构开始进行管道清洁工作。
10.根据本实用新型提供的一种拽引式管道清洁机器人,其创造性在于,相较于传统机器人集驱动与作业一体的结构设计,本实用新型采用分离式设计,将驱动模块与管道清洁机构采用缆绳连接,驱动模块在管道一端拽引管道另一端的管道清洁机构,管道清洁机
构所做的功完全克服作业,效率提升,管道清洁机构在管内移动的动力完全由驱动模块拽引提供,降低了管道清洁机构因阻力大或者打滑产生的不可控因素,使整个作业过程完全可控。
11.综上所述,本实用新型提供了一种大大提高作业距离,还能避免管内打滑现象发生的拽引式管道清洁机器人。
附图说明
12.图1是根据本实用新型的一个优选实施例提供的一种拽引式管道清洁机器人的驱动模块的结构示意图;
13.图2是根据本实用新型的一个优选实施例提供的一种拽引式管道清洁机器人的管道清洁机构的结构示意图;
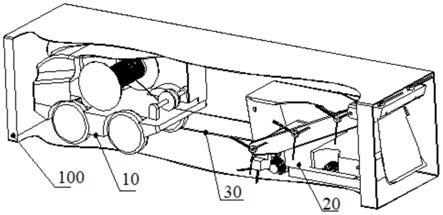
14.图3是根据本实用新型的一个优选实施例提供的一种拽引式管道清洁机器人的工作状态示意图。
具体实施方式
15.以下结合具体实施例,对本实用新型做进一步说明。应理解,以下实施例仅用于说明本实用新型而非用于限制本实用新型的范围。
16.结合图1~图3所示,是根据本实用新型的一个优选实施例提供的一种拽引式管道清洁机器人,包括:驱动模块10;管道清洁机构20;以及将驱动模块10与管道清洁机构20连接的缆绳30。其中,驱动模块10自身可移动,通过缆绳30拽引管道清洁机构20在管道100内作业。
17.根据该优选实施例,如图1所示,驱动模块10包括:移动底盘1,安装于移动底盘1上的自动缆盘2以及排绳器3,缆绳30依次缠绕在自动缆盘2以及排绳器3上,进而与管道清洁机构20连接实现对管道清洁机构20的拽引。
18.根据该优选实施例,移动底盘1通过步进电机驱动实现其自身移动。在移动底盘1的行驶过程中,自动缆盘2正向旋转向外放出缆绳30,实现边行驶边放缆的功能,自动缆盘2反向旋转则可收纳缆绳30,实现边行驶边收缆的功能,排绳器3使自动缆盘2上的缆绳30收纳时有序排列。移动底盘1载荷小,移动灵活,外界对移动底盘1阻力小,移动底盘1只需很小的驱动力便可以移动,并可携带自动缆盘2实现管道内的放绳作业。
19.根据该优选实施例,如图1所示,移动底盘1底部设有滚轮4,应当理解是,还可以是履带,以实现移动底盘1在管道100内的移动。
20.根据该优选实施例,如图2所示,管道清洁机构20包括:车体5,设置于车体5上的底盘刷模块6、前滚刷模块7、前负压吸尘箱8、侧盘刷模块9、后滚刷模块10、后负压吸尘箱11、以及顶盘刷模块12。其中,底盘刷模块6、前滚刷模块7、侧盘刷模块9、后滚刷模块10以及顶盘刷模块12均为毛刷结构,用于分别清扫管道100的底面、侧面以及顶面。前负压吸尘箱8和后负压吸尘箱11均为箱式集尘盒结构,用于收集管道100内的灰尘。应当理解的是,底盘刷模块6、前滚刷模块7、前负压吸尘箱8、侧盘刷模块9、后滚刷模块10、后负压吸尘箱11、以及顶盘刷模块12均属于本领域常规技术手段。
21.根据上述优选实施例提供的一种分体式管道作业机器人,其作业流程如下:
22.如图3所示,在管道100中,驱动模块10和管道清洁机构20之间通过缆绳30连接。驱动模块10从管道100的一个开口处移动至下一个开口处,并且在移动的过程中收放缆绳30,使得驱动模块10和管道清洁机构20之间的距离可调节,即实现作业距离的调节;
23.驱动模块10在拽引管道清洁机构20的过程中,管道清洁机构20所做的功完全作用于作业,效率提升,管道清洁机构20在管内移动的牵引力完全由驱动模块10拽引提供,降低了管道清洁机构20因阻力大或者打滑产生的不可控因素,使整个作业过程完全可控。
24.以上所述的,仅为本实用新型的较佳实施例,并非用以限定本实用新型的范围,本实用新型的上述实施例还可以做出各种变化。凡是依据本实用新型申请的权利要求书及说明书内容所作的简单、等效变化与修饰,皆落入本实用新型专利的权利要求保护范围。本实用新型未详尽描述的均为常规技术内容。
技术特征:
1.一种拽引式管道清洁机器人,其特征在于,包括:驱动模块,包括:移动底盘、自动缆盘以及排绳器,所述自动缆盘与排绳器安装于所述移动底盘上;管道清洁机构;以及缆绳,所述缆绳依次缠绕于所述自动缆盘与排绳器上,进而与所述管道清洁机构连接;其中,所述管道清洁机构在缆绳的拽引下实现对管道的清洁。2.根据权利要求1所述的拽引式管道清洁机器人,其特征在于,所述移动底盘通过步进电机驱动实现自身移动。3.根据权利要求1所述的拽引式管道清洁机器人,其特征在于,所述移动底盘底部设有滚轮或履带。4.根据权利要求1所述的拽引式管道清洁机器人,其特征在于,所述管道清洁机构包括:车体,设置于所述车体上的底盘刷模块、前滚刷模块、前负压吸尘箱、侧盘刷模块、后滚刷模块、后负压吸尘箱以及顶盘刷模块。
技术总结
本实用新型提供一种拽引式管道清洁机器人,包括:驱动模块,包括:移动底盘、自动缆盘以及排绳器,所述自动缆盘与排绳器安装于所述移动底盘上;管道清洁机构;以及缆绳,所述缆绳依次缠绕于自动缆盘与排绳器上,进而与管道清洁机构连接;其中,所述管道清洁机构在缆绳的拽引下实现对管道的清洁。根据本实用新型提供的一种拽引式管道清洁机器人,采用分离式设计,将驱动模块与管道清洁机构采用缆绳连接,驱动模块在管道一端拽引管道另一端的管道清洁机构,管道清洁机构所做的功完全克服作业,效率提升,管道清洁机构在管内移动的动力完全由驱动模块拽引提供,降低了管道清洁机构因阻力大或者打滑产生的不可控因素,使整个作业过程完全可控。全可控。全可控。
技术研发人员:顿向明 山磊 顿向勇 王旭云 肖丽成 高爱军 陈其洲
受保护的技术使用者:宁波介量机器人技术有限公司
技术研发日:2020.11.26
技术公布日:2021/9/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1