清洁装置的制作方法
1.本实用新型涉及镜片清洁技术领域,具体涉及一种清洁装置。
背景技术:
2.在摄像头等产品中,通常设置有传感器(sensor),传感器上具有镜片。所述传感器是用于探测光、热、压力等,属于敏感元件。
3.为了避免成像时因出现黑块(或黑斑、黑点)而影响图像显示效果,在将传感器与镜头其它组件进行组装前,需要对传感器进行清洁,去除传感器表面的灰尘等异物。
4.目前,为了对传感器进行清洁,通常会搭建无尘室,采用人工擦拭的方式,在无尘室内对传感器进行清洁。该无尘室无尘级别在万级以上,有的甚至达到千级或百级。
5.采用上述方式,对传感器进行清洁,不仅成本高,且清洁效率低。
技术实现要素:
6.本实用新型要解决的问题是:如何提高传感器的清洁效率。
7.为解决上述问题,本实用新型实施例提供了一种清洁装置,所述清洁装置包括:放料结构、清洁结构、收料结构及驱动结构;其中:
8.所述放料结构,输出清洁用物料;
9.所述清洁结构,具有擦拭端,利用所述擦拭端与待清洁物接触,对所述待清洁物进行清洁;对所述待清洁物进行清洁包括:清洁所述待清洁物表面的灰尘;
10.所述收料结构,回收物料;所述放料结构输出的物料经所述清洁结构的擦拭端后,绕至所述收料结构上;
11.驱动结构,驱动所述放料结构输出物料,以及驱动所述收料结构回收物料。
12.可选地,所述清洁装置还包括:支撑架,所述放料结构、清洁结构、收料结构及驱动结构位于所述支撑架上。
13.可选地,所述放料结构和所述收料结构位于所述支撑架的第一侧壁,所述驱动结构位于所述支撑架的第二侧壁,所述第一侧壁与所述第二侧壁相对。
14.可选地,所述驱动结构包括:
15.电机,在运转指令的控制下进行转动;
16.固定在电机转轴上的收料驱动组件,所述收料驱动组件与所述电机配合,驱动所述收料结构回收物料;
17.放料驱动组件,与所述放料结构连接,在所回收的物料的牵引下,驱动所述放料结构转动。
18.可选地,所述放料结构,包括:
19.固定在所述支撑架第一侧壁上的放料轴;
20.固定在所述放料轴一端上的第一物料容纳部,所述第一物料容纳部中容纳的物料经所述清洁结构的擦拭端,与所述收料结构连接。
21.可选地,所述放料驱动组件,包括:
22.固定在所述放料轴另一端上的放料滑轮;
23.固定在所述支撑架上且与所述放料滑轮位于所述支撑架同一侧的阻尼定轮;
24.与所述阻尼定轮及放料滑轮啮合的放料圆带。
25.可选地,所述收料结构,包括:
26.固定在所述支撑架第一侧壁上的收料轴;
27.固定在所述收料轴一端上的第二物料容纳部,所述第二物料容纳部容纳所述放料结构输出的物料。
28.可选地,所述收料驱动组件,包括:
29.固定在所述收料轴另一端的收料滑轮;
30.所述收料滑轮与电机轴传动连接。
31.可选地,所述收料驱动组件,还包括:
32.固定在所述电机轴上的主动同步轮;
33.固定在所述支撑架上的从动同步轮,所述主动同步轮与从动同步轮通过同步带连接;
34.固定在所述从动同步轮上的连接轮,所述连接轮与所述收料滑轮通过收料圆带连接。
35.可选地,所述收料结构,还包括:位于所述支撑架第一侧壁上的第一导向轴、第二导向轴及收料模块,其中:
36.所述第一导向轴及第二导向轴,将经过所述清洁结构的擦拭端的物料导向至所述收料结构;
37.所述收料模块,与所述从动同步轮连接,在所述从动同步轮发生转动时,向所回收的物料施加压力,并在物料表面沿物料运动方向旋转。
38.可选地,所述清洁结构包括:
39.固定在所述支撑架第一侧壁的升降驱动部,在升降指令的控制下,执行升降动作;
40.清洁液容纳部;
41.擦拭部,固定在所述升降驱动部上,且具有擦拭端;
42.所述清洁液容纳部通过管路将清洁液输送至所述擦拭端的物料上。
43.可选地,所述清洁结构还包括:固定在所述支撑架第一侧壁的第三导向轴;所述升降驱动部沿所述第三导向轴进行升降动作。
44.可选地,所述物料为无尘布。
45.可选地,对所述待清洁物进行清洁所使用的清洁液为酒精。
46.可选地,所述清洁装置还包括:控制结构,与所述驱动结构及清洁结构连接,用于产生相应的控制指令,并发送至所述驱动结构及清洁结构。
47.与现有技术相比,本实用新型实施例的技术方案具有以下优点:
48.应用本实用新型的方案,通过设置放料结构、清洁结构、收料结构及驱动结构,由于放料结构输出的物料经清洁结构的擦拭端后,绕至收料结构上,故在驱动结构驱动收料结构回收物料时,可以促使放料结构输出新的物料,进而更新清洁结构的擦拭端处的物料,而无需人工手动更新清洁结构的擦拭端处的物料,由此可以提高清洁效率。
49.进一步,清洁结构中的升降驱动部,可以在升降指令的控制下,执行升降动作,由此可以实现自动化清洁,代替人工清洁,进一步提高清洁效率。
附图说明
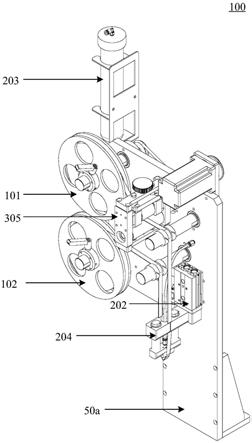
50.图1是本实用新型实施例中一种清洁装置的主视图;
51.图2是图1中清洁装置左视图的爆炸示意图;
52.图3是图1在清洁装置右视图;
53.图4是本实用新型实施例中清洁方法的流程图。
具体实施方式
54.目前,含有镜头的产品中,通常设置有传感器,传感器上具有镜片。镜片上若存在灰尘等异物,会使得最终的成像出现黑块,影响图像显示效果,因此,在将传感器与镜头其它组件进行组装前,需要对传感器进行擦拭。
55.现有擦拭方法中,大都通过人工在无尘环境中对传感器进行擦拭。具体地,人工更换无尘布,再蘸取清洁液,对传感器进行擦拭,清洁效率低。
56.针对该问题,本实用新型提供了一种清洁装置,所述清洁装置具有放料结构、清洁结构、收料结构及驱动结构,放料结构输出的物料经清洁结构的擦拭端后,绕至收料结构上,在驱动结构驱动收料结构回收物料时,可以促使放料结构输出新的物料,进而更新清洁结构的擦拭端处的物料,而无需人工手动更新清洁结构的擦拭端处的物料,由此可以提高清洁效率。
57.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例作详细地说明。
58.图1为本实用新型实施例提供的一种清洁装置的主视图。图2为图1中清洁装置左视图的爆炸示意图。图3为图1中清洁装置的右视图。
59.参照图1至图3,所述清洁装置100可以包括:放料结构、清洁结构、收料结构及驱动结构。其中:
60.所述放料结构,输出清洁用物料200;
61.所述清洁结构,具有擦拭端201,利用所述擦拭端201与待清洁物接触,对所述待清洁物进行清洁;
62.所述收料结构,回收物料200;所述放料结构输出的物料200经所述清洁结构的擦拭端201后,绕至所述收料结构上;
63.驱动结构,驱动所述放料结构输出物料200,以及驱动所述收料结构回收物料200。
64.在驱动结构的驱动下,收料结构可以自动回收物料200,同时促使放料结构输出新的物料200,达到更新清洁结构擦拭端201处物料200的目的,而无需人工手动更新清洁结构的擦拭端处的物料200,提高清洁效率。
65.在具体实施中,所述放料结构、清洁结构、收料结构及驱动结构,可以分散设置,只要能够达到自动更新清洁结构擦拭端处物料200的目的即可。
66.在本实用新型的一实施例中,为了便于应用管理,所述清洁装置还可以包括支撑架50。所述放料结构、清洁结构、收料结构及驱动结构位于所述支撑架50上。
67.所述放料结构、清洁结构、收料结构及驱动结构,在所述支撑架50的位置不作限定,只要能够达到自动更新清洁结构擦拭端处物料200的目的即可。
68.在本实用新型的一实施例中,可以将所述放料结构和所述收料结构设置在所述支撑架50的第一侧壁50a,所述驱动结构设置在所述支撑架50的第二侧壁50b,所述第一侧壁50a与所述第二侧壁50b相对。
69.在具体实施中,所述驱动结构可以存在多种实现方式,此处不作限定,只要能够驱动所述放料结构输出物料200,以及驱动所述收料结构回收物料 200即可。
70.在本实用新型的一实施例中,所述驱动结构可以包括:电机401、收料驱动组件及放料驱动组件。
71.其中,所述电机401具有电机轴401a。所述电机401作为动力源,与所述收料驱动组件相配合,可以驱动所述收料结构回收物料200。放料驱动组件与所述放料结构连接,放料结构与收料结构通过物料200向连接。当所述收料结构回收物料200时,在所回收的物料200的牵引下,所述放料驱动组件可以驱动所述放料结构转动,从而实现放料驱动。
72.采用上述驱动结构,可以在回收物料200的同时,驱动放料结构放料,达到自动更新清洁用物料200的目的。
73.在具体实施中,所述收料结构可以包括:收料轴301及第二物料容纳部 302。其中:
74.所述收料轴301固定在所述支撑架50的第一侧壁上。所述第二物料容纳部302,固定在所述收料轴301一端上。所述第二物料容纳部302容纳所述放料结构输出的物料200。
75.在具体实施中,所述第二物料容纳部302可以是圆周具有凹槽的圆盘,该圆盘的中心固定在收料轴301一端上。第二物料容纳部302可以随着收料轴301的转动而转动。在第二物料容纳部302沿物料200缠绕的方向转动时,可以将物料200沿凹槽的延伸方向(即圆盘的圆周)有序地缠绕在凹槽中,实现物料的回收。
76.关于所述收料轴301及第二物料容纳部302的直径,具体可以根据支撑架50及其它结构的大小进行设置。
77.当然,在其它实施例中,所述第二物料容纳部302也可以为适于容纳物料200的其它形状。可以理解的是,无论所述第二物料容纳部302的形状如何,均不构成对本实用新型的限制,且均在本实用新型的保护范围之内。
78.在本实用新型的一实施例中,所述收料驱动组件可以包括:收料滑轮421。所述收料滑轮421固定在所述收料轴301的另一端。所述收料滑轮421与电机轴301a传动连接。
79.电机轴301a的转动可以带动收料滑轮421转动。当收料滑轮421转动时,可以带动收料轴301转动,而收料轴301的转动,可以带动第二物料容纳部 302转动,进而将物料200缠绕在凹槽中。
80.在具体实施中,所述收料滑轮421可以采用多种方式,与电机轴301a传动连接,此处不作限制,只要能够使得收料滑轮421随着电机轴301a的转动而转动即可。
81.在具体实施中,所述放料结构可以存在多种实现方式,具体不作限制。
82.在本实用新型的一实施例中,参照图1及图2,所述放料结构可以包括:放料轴101及第一物料200容纳部102。其中:
83.所述放料轴101固定在所述支撑架50第一侧壁50a上。所述第一物料200 容纳部102,固定在所述放料轴101一端上,所述第一物料200容纳部102中容纳的物料200经所述清
洁结构的擦拭端201,与所述收料结构连接。
84.在具体实施中,所述第一物料容纳部102可以是圆周具有凹槽的圆盘,该圆盘的中心固定在放料轴101一端上。物料200可以沿凹槽的延伸方向(即圆盘的圆周)有序地缠绕在凹槽中。第一物料容纳部102可以随着放料轴101 的转动而转动。在第一物料容纳部102沿物料200缠绕的反方向转动时,可以输出物料200。
85.关于所述放料轴101及第一物料容纳部102的直径,具体可以根据支撑架50及其它结构的大小进行设置。
86.当然,在其它实施例中,所述第一物料容纳部102也可以为适于容纳物料200的其它形状。可以理解的是,无论所述第一物料容纳部102的形状如何,均不构成对本实用新型的限制,且均在本实用新型的保护范围之内。
87.在具体实施中,所述放料驱动组件可以存在多种实现方式,具体不作限制。
88.在本实用新型的一实施例中,参照图3,所述放料驱动组件可以包括:放料滑轮411,阻尼定轮412及放料圆带413。其中:
89.所述放料滑轮411固定在所述放料轴101的另一端上。所述阻尼定轮412 固定在所述支撑架50上,且与所述放料滑轮411位于所述支撑架50同一侧。放料圆带413与所述阻尼定轮412及放料滑轮411相啮合。所述阻尼定轮412 是固定不转的。
90.在具体实施中,收料结构进行物料回收时,会通过物料牵动放料轴101 旋转,进而固定在放料轴101上的放料滑轮411会随着放料轴101的旋转而旋转。放料滑轮411的旋转会带动放料圆带413转动。当放料滑轮411带动放料圆带413转动时,阻尼定轮412对放料圆带413及放料滑轮411的转动施加一定的阻力,使得放料速度减缓。
91.通过调整阻尼定轮412的阻力值,可以调整放料结构的放料速度。
92.在本实用新型的一实施例中,所述收料驱动组件,还可以包括:主动同步轮422,从动同步轮及连接轮423。其中:
93.所述主动同步轮422固定在所述电机轴301a上。所述从动同步轮固定在所述支撑架50上。所述主动同步轮422与所述从动同步轮通过同步带424连接。所述连接轮423固定在所述从动同步轮上,所述连接轮423与所述收料滑轮421通过收料圆带425连接。
94.在具体实施中,电机轴301a转动,会带动主动同步轮422转动。由于同步带424与主动同步轮422及从动同步轮相啮合,主动同步轮422转动时,通过同步带424,会带动从动同步轮转动,进而由从动同步轮带动连接轮423 转动。由于收料圆带425与连接轮423及收料滑轮421相啮合,故在连接轮 423转动时,会带动收料滑轮421转动,再由收料滑轮421带动收料轴301转动,实现物料的回收。
95.在一些实施例中,通过调整收料结构及放料结构的位置,经过清洁结构擦拭端201处的物料200,可以直接被收料结构回收,即经过清洁结构擦拭端 201处的物料200,能够准确地被收料结构容纳在第二物料容纳部302中,而无需借助任何导向结构。
96.在本实用新型的一实施例中,为了使得经过清洁结构擦拭端201处的物料200,能够更加准确地被收料结构容纳在第二物料容纳部302中,所述收料结构还可以包括:位于所述支撑架第一侧壁上的第一导向轴303、第二导向轴304及收料模块305。其中:
97.所述第一导向轴303及第二导向轴304,将经过所述清洁结构的擦拭端 201的物料200导向至所述收料结构;
98.所述收料模块305,与所述从动同步轮423连接,在所述从动同步轮423 发生转动时,向所回收的物料200施加压力,并在物料表面沿物料200运动方向旋转。
99.在具体实施中,收料模块305具有旋压部件,一方面,该旋压部件可以在物料表面沿物料200运动方向旋转,为物料的输送提供一定的动力。此时,电机301除通过收料轴301为收料结构提供收料动力外,还通过从动同步轮 423带动收料模块305旋转,来为收料结构提供收料动力。
100.另一方面,该旋压部件可以对所回收的物料200施加压力,则可以使得所回收的物料200能够更加有序地被缠绕至第二物料容纳部302的凹槽中。
101.当然,用于将物料200导向收料结构的导向轴数量不作限制,具体根据实际需要进行设置即可,比如,也可以仅设置一个导向轴,或者设置三个或三个以上的导向轴。
102.在其它实施例中,也可以不设置收料模块305,仅通过收料轴301为收料结构提供收料动力。
103.在具体实施中,所述清洁结构可以存在多种实现方式,具体不作限制,只要能够对待清洁物进行清洁即可。
104.在本实用新型的一实施例中,参照图1及图2,所述清洁结构可以包括:升降驱动部202、清洁液容纳部203及擦拭部204。其中:
105.所述升降驱动部202固定在所述支撑架50的第一侧壁50a上,可以接收升降指令,并在升降指令的控制下,执行升降动作。
106.所述清洁液容纳部203,能够容纳用于清洁的清洁液。
107.所述擦拭部204固定在所述升降驱动部202上,且具有擦拭端201。
108.所述清洁液容纳部203通过管路将清洁液输送至所述擦拭端201的物料上。
109.在具体实施中,所述清洁液容纳部203可以固定在支撑架50上。清洁液容纳部203具有容纳清洁液的容纳腔,比如,当清洁液为酒精时,所述清洁液容纳部203可以为酒精桶。所述酒精桶可以通过卡扣或螺栓等方式,固定在支撑架上。清洁液容纳部203中的清洁液,可以通过管路的方式,输送至擦拭端201的物料上。
110.在具体实施中,擦拭端201位于擦拭部204靠近待清洁物的一端,比如,可以为擦拭部204的前端。清洁液容纳部203的管路,可以将清洁液输送至擦拭端201的物料上。
111.为了避免清洁液外泄,清洁液容纳部203的管路可以经连通擦拭端201 的通孔,输入至擦拭端201上,再由擦拭端201的若干细孔,渗出至擦拭端 201的物料上。
112.在具体实施中,所述升降驱动部202可以为升降气缸。当升降驱动部202 执行升降动作时,所述擦拭部204能够与所述升降驱动部202同步升降。当升降驱动部202带动擦拭部204下降至预设位置时,能够与待清洁物表面接触,进而清洁待清洁物表面。清洁后,升降驱动部202带动擦拭部204上升,使得清洁后的待清洁物能够移出。
113.由于升降驱动部202能够基于升降指令,执行升降动作,进而带动擦拭部204对待清洁物进行请求,由此可以实现自动化清洁,进一步减少人工操作,提高清洁效率。
114.在具体实施中,所述清洁结构还包括:固定在所述支撑架50第一侧壁50a 的第三导向轴。所述升降驱动部202可以沿所述第三导向轴进行升降动作。
115.当然,在其它实施例中,所述升降驱动部202也可以通过其它方式在支撑架50第一侧壁50a表面沿竖直方向移动,此处不作限制。
116.在具体实施中,所述物料可以为无尘布。无尘布通常由100%聚酯纤维双编织而成,表面柔软,易于擦拭敏感表面,摩擦不脱纤维,具有良好的吸水性及清洁效率。当然,所述物料也可以为其它适于擦拭的材料,此处不作限制。
117.在具体实施中,无尘布可以呈卷装,卷装的无尘布安装于第一物料容纳部102中。第一物料容纳部102暴露卷装无尘布的一端。卷装无尘布被暴露的一端,经第一导向轴303至擦拭部204的擦拭端201,再经第二导向轴304 至收料模块305,最后容纳至第二物料容纳部302中,完成无尘布的绕线。
118.参照图4,本实用新型实施例还提供了一种清洁方法,所述清洁方法适于采用上述实施例中的清洁装置100,对待清洁物进行清洁。下面结合图1至图 3,对所述方法进行详细描述。
119.所述方法可以包括如下步骤:
120.步骤41,在检测到预设位置上存在待清洁物时,控制所述清洁结构对所述待清洁物执行清洁操作。
121.在本实用新型的一实施例中,所述清洁装置可以包括控制结构,所述控制结构与所述驱动结构及清洁结构连接,用于产生相应的控制指令,并发送至所述驱动结构及清洁结构。
122.具体地,所述控制结构可以检测预设位置上是否存在待清洁物。若存在待清洁物,可以向所述升降驱动部202发送升降指令,控制升降驱动部202 带动擦拭部204下降。升降驱动部202会带动擦拭部204下降,进而使得擦拭端201下压至物料表面。此时,清洁液容纳部203内的清洁液自管路输送至擦拭端201,对待清洁物进行清洁。
123.需要说明的是,在具体实施中,控制结构可以通过多种方法检测预设位置上存在待清洁物,此处不作限制。比如,可以通过位移传感器,检测所述待清洁物的位移。
124.在其它实施例中,也可以不设置控制结构,而在升降驱动部202设置控制升降的按钮或开关。在预设位置上存在待清洁物时,打开开关,使得升降驱动部202执行升降动作。
125.在具体实施中,执行清洁操作之前或之后,所述方法可以包括如下步骤:
126.步骤42,控制所述驱动结构,来驱动所述收料结构回收预设长度的物料 200。
127.在具体实施中,所述控制结构还可以向电机401发送运转指令。电机401 在接收到该运转指令后,执行运转,同时通过收料驱动组件驱动收料结构收料,再由收料结构带动放料结构及放料驱动组件,进行放料,从而达到自动化更新擦拭端201处物料的目的。
128.比如,在清洁完成后,升降驱动部202会带动擦拭部204上升,电机401 发生运转,电机轴401连接主动同步轮422,通过同步带424带动从动同步轮转动,进而带动连接轮423及收料圆带425转动。通过收料圆带425带动收料滑轮421转动,完成无线收无衬布。
129.相应地,在电机401的牵引下,放料轴101发生转动,进而带动放料滑轮411转动。通过放料圆带413连接的阻尼定轮412,实现无尘布带张力放料。
130.在其它实施例中,也可以不设置控制结构,而在电机401设置控制开关。在执行清洁操作之前或之后,打开开关,使得电机401运转,进而驱动所述收料结构回收预设长度的物料200。
131.在本实用新型的一实施例中,所述清洁液容纳部203可以具有控制清洁液流量的阀门,该阀门可以接收所述控制结构输出的流通指令,基于该流通指令,控制清洁液流入至
擦拭端201,同时控制清洁液的流量。
132.需要说明的是,本实用新型实施例中的清洁装置,不仅适用于对传感器进行清洁,对于任何具有镜片的装置,均可以实施清洁。
133.虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1