一种基于4D打印的管道清洁装置及可控变形的实现方法
一种基于4d打印的管道清洁装置及可控变形的实现方法
技术领域
1.本发明涉及4d打印技术领域的一种管道清洁装置,具体涉及了一种基于4d打印的管道清洁装置及可控变形的实现方法。
背景技术:
2.随着城市高楼的兴建,楼道内部遍布着各种管道。长时间的使用管道会堆积各种杂质,产生各种异味,危害人们的身体健康,一段时间不清理甚至会使管道发生堵塞。现在市场上的清洁装置虽然也具有物理化学双重清洗,调整清洗部分的长度等功能。但是针对不同直径的管道或是同一根前后直径不相同的管道,目前并没有很好的解决方案。因此需要研发出一种管道清洁装置,可以对不同长度的管道清洁的同时,也能够对不同直径的管道进行清洗,适用范围更广,拆卸运输方便,清洁效果也更加。
技术实现要素:
3.本发明的目的是针对上述问题,提供一种基于4d打印的管道清洁装置,以解决上述背景中提到的问题。
4.为实现上述目的,本发明的技术方案如下:
5.一、一种基于4d打印的管道清洁装置
6.本发明包括驱动机构、可控变形活动铰链和清洁机构三部分,可控变形活动铰链的一端固定连接驱动机构,可控变形活动铰链的另一端固定连接清洁机构,通过可控变形活动铰链使得驱动机构和清洁机构连接。
7.所述的驱动机构从下往上分别布置有圆筒、细杆、电机和连接块,细杆的一端活动套装在圆筒中,细杆可以在圆筒中进行往复运动,根据清洗管道的长度进行调整。细杆的另一端连接电机,电机的输出端固定连接在连接块底部的中心,使连接块以一定的转速旋转。连接块四边的中心均开有一个燕尾槽,每个燕尾槽通过一个可控变形活动铰链连接一个清洁机构;连接块和可控变形活动铰链之间以楔形的方式相连,结构简单,安全可靠,在电机的驱动下可以带着整个装置平稳的旋转。
8.所述的清洁机构包括清洁板、喷头和清洁刷三部分;清洁板的内部布置有清洁管,清洁板一端的中心固定安装有喷头,清洁管和喷头相连,清洁刷套装在安装有喷头一端的清洁板上,清洁刷布置在喷头外,清洁板另一端的中心开有燕尾槽,可控变形活动铰链的一端固定连接在清洁板另一端的燕尾槽中,可控变形活动铰链的另一端固定连接在连接块的燕尾槽中。
9.所述的喷头呈椭圆形状,喷头的表面沿轴向间隔均匀地设有小孔,可以使清洁液均匀地分布在喷头外部的清洁刷上。
10.所述的清洁刷整体呈球形,可以套在清洁板一端。清洁刷包括表面的毛刷和内部的海绵体,外部的毛刷长度为3厘米左右,具有一定的硬度,内部的海绵体是镂空的,具有良好的吸水性和弹性。
11.所述的细杆和圆筒的中心线与连接块的中心线重合,圆筒靠近低端的内部安装有驱动电机,通过驱动电机的正反转实现细杆的往复运动,根据所要清洗管道的长度,控制驱动电机的工作时长,使细杆运动到目的地。
12.所述的可控变形活动铰链由3d打印机制作而成,可控变形活动铰链采用形状记忆聚合物(smp)的可变形材料。
13.所述的可控变形活动铰链的内部嵌有电阻丝,通电后可控变形活动铰链升温发生恢复,恢复至水平状态。
14.二、4d打印的管道清洁装置可控变形方法
15.4d打印的管道清洁装置可控变形的的实现方法,包括以下步骤:
16.步骤1:在有限元分析工具abaqus中对管道清洁装置在清洗时,可控变形活动铰链的电流i、可控变形活动铰链的电流i对应的可变形活动铰链恢复角度α、可控变形活动铰链的电流i对应的清洗板转过的角度β进行大量的有限元分析,具体是:输入可控变形活动铰链的电流i1~i
x
,可变形活动铰链3因温度上升发生形状恢复,获得对应的可变形活动铰链的恢复角度α1~α
x
的实际值和所对应的清洗板转过的角度β1~β
x
;其中,i1表示第一次输入可控变形活动铰链的电流,i
x
表示第x次输入可控变形活动铰链的电流,α1表示第一次输入可控变形活动铰链的电流获得的对应的可变形活动铰链的恢复角度的实际值,α
x
表示第x次输入的可控变形活动铰链的电流获得的对应的可变形活动铰链的恢复角度的实际值,β1表示第一次输入可控变形活动铰链的电流获得的对应的清洗板转过的角度,β
x
表示第x次输入可控变形活动铰链的电流获得的对应的清洗板转过的角度;
17.步骤2:因为有限元分析中获得的数据是离散的,未得到i与α的对应关系,于是利用机器学习中的线性回归模型确定可控变形活动铰链的电流i与可变形活动铰链的恢复角度α的关系,具体是:将步骤1中输入的可控变形活动铰链的电流i1~i
x
代入如下公式表示的线性回归模型中,
18.f(α)=mi+n
19.式中,m和n分别代表线性关系的第一和第二系数;i代表可控变形活动铰链的电流;f(α)表示可控变形活动铰链的电流i代入线性回归模型获得的观测值;
20.采用均方误差作为线性回归的性能度量,以实际值与观测值相减的平方和为目标函数,以目标函数最小采用最小二乘法求解m和n,确定可控变形活动铰链的电流i与可变形活动铰链的恢复角度α的对应关系,利用上述对应关系对管道清洗时的可控变形活动铰链的电流i进行处理,获得清洗时可变形活动铰链的恢复角度α;
21.步骤3:按照以下公式根据清洗时可变形活动铰链的恢复角度α将对应关系转换为清洗的管道半径r与可控变形活动铰链的电流i的对应关系:
22.r=l0cos(α0‑
α)+l1cos(90
°‑
β)+a
23.式中,l0表示可控变形活动铰链弯曲时两端中点相连的距离,α0表示可控变形活动铰链弯曲最大时的角度,α表示变形活动铰链的恢复角度,l1表示清洁板和清洁刷的长度,β表示清洁板转过的角度,a是连接块中心和可控变形活动铰链一端中点的距离;
24.清洗的管道半径r确定后,利用清洗的管道半径r与可控变形活动铰链的电流i的对应关系对管道清洗时的可控变形活动铰链的电流i进行处理实现对可控变形活动铰链的可控变形,进而完成对管道的清洗工作。
25.本发明的有益效果是:
26.1、整个装置可以根据所需清洗管道的长度调节细杆的伸长量。细杆在圆筒中可以进行往复运动,重复清洗管道。
27.2、针对不同直径的管道可以输入相对应的电流,使可控变形活动铰链恢复相应的角度,清洁刷与管壁相接触。在清洗时,电机可以带动连接块旋转,实现整个管道壁的清洗。
28.3、在清洁时,清洁管道中通入清洁液,通过喷头清洁液均匀地喷洒在海绵体上。清洁刷与管壁的挤压作用会使清洁液流出从而实现物理化学的双重清洗。
29.总之,本发明可以根据管道的长度调节伸长量,根据管道的直径调节活动铰链的弯曲角度;在清洗时实现物理和化学的双重清洗作用,连接块的旋转实现充分清洗;且本发明携带拆卸方便,操作简单。
附图说明
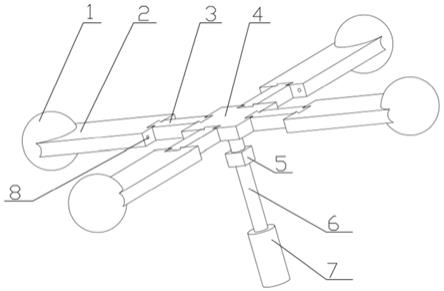
30.图1为本发明的基于4d打印的管道清洁装置可控变形活动铰链完全恢复时的结构示意图;
31.图2为本发明的基于4d打印的管道清洁装置可控变形活动铰链弯曲角度最大时的结构示意图;
32.图3为本发明的可控变形活动铰链的内部电路布置示意图;
33.图4为本发明的清洁板的结构示意图;
34.图5为喷头的结构示意图。
35.图中,1、清洁刷;2、清洁板;3、可控变形活动铰链;4、连接块;5、电机;6、细杆;7、圆筒;8、清洁管;9、内部电路;10、喷头。
具体实施方式
36.为使说明更加清楚,现结合附图和实施例对本发明中的技术方案进行更进一步完整、清晰地描述。
37.如图1所示,本发明的基于4d打印的管道清洁装置包括驱动机构、可控变形活动铰链3和清洁机构三部分,可控变形活动铰链的一端固定连接驱动机构,可控变形活动铰链的另一端固定连接清洁机构。
38.驱动机构从下往上分别布置有圆筒7、细杆6、电机5和连接块4,细杆6和圆筒7组成推进机构,圆筒7的中心开有通孔,细杆6的一端活动套装在圆筒7的通孔中,细杆6可以在圆筒7中进行往复运动,根据清洗管道的长度进行调整。细杆6的另一端连接电机5,电机5的输出端固定连接在连接块4底部的中心,在清洁时,电机5可以带着连接块4以一定的转速平稳旋转。连接块4整体呈正方形,连接块4四个边的中心均开有一个燕尾槽,每个燕尾槽均固定连接可控变形活动铰链3的一端;连接块4和可控变形活动铰链3之间以楔形的方式相连,结构简单,安全可靠,在电机的驱动下可以带着整个装置平稳的旋转。
39.如图1和图4所示,清洁机构包括清洁板2、喷头10和清洁刷1三部分;清洁板2的内部布置有清洁管8,清洁板2一端的中心固定安装有喷头10,清洁管8和喷头10相连,清洁液可从清洁管8流入喷头10,清洁刷1套装在安装有喷头10一端的清洁板2上,清洁板2套装在喷头外,清洁板2另一端的中心开有燕尾槽,可控变形活动铰链3的另一端固定连接在清洁
板2另一端的燕尾槽中。
40.如图5所示,喷头10呈椭圆形状,喷头10的表面沿轴向间隔均匀地设有小孔,可以使清洁液均匀地分布在喷头10外部的清洁刷1上。
41.清洁刷1整体呈球形,可以套在清洁板2一端。清洁刷1包括表面的毛刷和内部的海绵体,外部的毛刷长度为3厘米左右,具有一定的硬度,内部的海绵体是镂空的,具有良好的吸水性和弹性。在清洁时,毛刷和管壁的挤压作用会使海绵体吸收的清洁液流出,实现物理和化学的双重清洁作用。
42.细杆6和圆筒7的中心线与连接块4的中心线重合,圆筒7靠近低端的内部安装有驱动电机,通过驱动电机的正反转实现细杆6的往复运动,根据所要清洗管道的长度,控制驱动电机的工作时长,使细杆6运动到目的地。
43.如图3所示为可控变形活动铰链的内部电路9的布置示意图,可控变形活动铰链3由3d打印机制作而成,可控变形活动铰链3采用形状记忆聚合物smp的可变形材料,可控变形活动铰链3的内部嵌有电阻丝,当活动铰链的一端输入电流,电阻丝会产生热量并将热量传递给形状记忆聚合物smp材料,形状记忆聚合物smp材料升温后会根据输入的电流恢复与管道直径相匹配的角度,通电后可控变形活动铰链3升温发生恢复,恢复至水平状态。
44.4d打印的管道清洁装置可控变形的实现方法,包括以下步骤:
45.步骤1:在有限元分析工具中对管道清洁装置在清洗时,可控变形活动铰链的电流i、可控变形活动铰链的电流i对应的可变形活动铰链恢复角度α、可控变形活动铰链的电流i对应的清洗板转过的角度β进行有限元分析,具体是:输入可控变形活动铰链的电流i1~i
x
,获得对应的可变形活动铰链的恢复角度α1~α
x
的实际值和所对应的清洗板转过的角度β1~β
x
;其中,i1表示第一次输入可控变形活动铰链的电流,i
x
表示第x次输入可控变形活动铰链的电流,α1表示第一次输入可控变形活动铰链的电流获得的对应的可变形活动铰链的恢复角度的实际值,α
x
表示第x次输入的可控变形活动铰链的电流获得的对应的可变形活动铰链的恢复角度的实际值,β1表示第一次输入可控变形活动铰链的电流获得的对应的清洗板转过的角度,β
x
表示第x次输入可控变形活动铰链的电流获得的对应的清洗板转过的角度;
46.步骤2:利用机器学习中的线性回归模型确定可控变形活动铰链的电流i与可变形活动铰链的恢复角度α的关系,具体是:将步骤1中输入的可控变形活动铰链的电流i1~i
x
代入如下公式表示的线性回归模型中,
47.f(α)=mi+n
48.式中,m和n分别代表线性关系的第一和第二系数;i代表可控变形活动铰链的电流;f(α)表示可控变形活动铰链的电流i代入线性回归模型获得的观测值;
49.采用均方误差作为线性回归的性能度量,以实际值与观测值相减的平方和为目标函数,以目标函数最小采用最小二乘法求解m和n,确定可控变形活动铰链的电流i与可变形活动铰链的恢复角度α的对应关系,利用上述对应关系对管道清洗时的可控变形活动铰链的电流i进行处理,获得清洗时可变形活动铰链的恢复角度α;
50.步骤3:按照以下公式根据清洗时可变形活动铰链的恢复角度α将对应关系转换为清洗的管道半径r与可控变形活动铰链的电流i的对应关系:
51.r=l0cos(α0‑
α)+l1cos(90
°‑
β)+a
52.式中,l0表示可控变形活动铰链弯曲时两端中点相连的距离,α0表示可控变形活动铰链弯曲最大时的角度,α表示变形活动铰链的恢复角度,l1表示清洁板和清洁刷的长度,β表示清洁板转过的角度,a是连接块中心和可控变形活动铰链一端中点的距离;
53.清洗的管道半径r确定后,利用清洗的管道半径r与可控变形活动铰链的电流i的对应关系,对管道清洗时的可控变形活动铰链的电流i进行处理实现对可控变形活动铰链的可控变形,进而完成对管道的清洗工作。
54.本发明的工作过程:
55.清洗前,整个装置处于图2所示的状态。准备清洗时,将细杆6的中心线与清洗管道的中心线对齐;推进机构缓慢推动细杆6至需要清洗的管道的最远距离,整个推进过程圆筒7始终留在管道外面;然后根据管道规格,输入对应的电流使可控变形活动铰链弯曲至清洁刷中的毛刷与管壁相接触;此时往清洁板2中的清洁管8中输入清洁液,清洁液通过清洁管8流入到喷头10,清洁液通过喷头均匀地喷洒到清洁刷1上;接着启动电机5,电机5带动连接块4和清洁板旋转,使清洁刷清洗整个管壁;然后推进机构控制细杆6缓慢的退出清洗管道。当清洁刷退出至清洗管道的管口时,第一次清洗结束。为了使清洁管道清洗干净也可多次重复上述过程。清洗结束后,先停止电机5再停止输送清洁液,然后停止通电,可控变形活动铰链会恢复至最大弯曲状态即图2所示的状态。以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不局限于此。在本发明的构思范围内,可以对本发明的技术方案进行多种简单变形,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本发明所公开的内容,均属于本发明所保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1