一种适用于平铺式光伏电站的清扫装置及其方法与流程
1.本发明涉及光伏组件清扫技术领域,具体涉及一种适用于平铺式光伏电站的清扫装置及其方法。
背景技术:
2.屋面的平铺式光伏电站的组件倾角很小,表面很容易造成灰尘堆积,长时间作用下对组件发电量有较大的影响。尤其在大气污染或粉尘污染严重的地区,如:钢厂、纺织厂周边的屋面电站,积灰对发电量的影响甚至高于30%。
3.同时,为生产需要,厂房的屋面通常会设置排气孔、风机、空调设备及附属构筑物等,传统的清扫机器人无法穿越这些障碍物,从而无法实现整排清扫,同时因空间限制,在障碍物两侧均安装清扫机器人亦无法实现。
4.一般来说,在满足投资收益的情况下,传统的清扫机器人在有障碍物的屋面平铺式光伏电站的清扫覆盖率不足40%,如要实现该类型电站的全域清扫,或采用人工+机器清扫相结合的方式,或机器人无法清扫的区域不进行清扫。
5.未设置足够空间和通道的大阵列屋面电站,人工清扫极为不便,且容易造成组件的损坏,因此,通常在不安装清扫机器人的区域不清扫,灰尘对组件发电的影响较大。
6.由于人工清扫频次一般在4次/年,远低于清扫机器人的清扫频率,也无法实现污染严重时的实时清扫,因此对发电量的提升效果有限。
7.因厂房车间的不同区域产生的污染物类型和浓度不同,当屋面区域较大时(如上万平米时)会出现个别区域被污染的情况,此时,如采用人工清扫则不经济,如采用清扫机器人则需要对整排组件进行清扫,无法实现定点或定区域进行清扫,会造成易损零部件损耗高,全生命周期的总体投资成本大。
8.那么,对于屋面没有任何障碍物的屋面平铺式光伏电站,目前市场上尚无可自主越排清扫的清扫机器人,需要每排组件均安装一台,因此总投资成本奇高。
技术实现要素:
9.本发明的目的是提供一种适用于平铺式光伏电站的清扫装置及其方法。此装置旨在解决传统清扫设备因无法全域清扫、无法避障、无法定点除尘导致的发电量提升受限、组件热斑等问题,采用可自主升降的升降支撑系统和柔性索,使得清扫本体跨越屋面障碍物,实现自主避障的同时,能够进行定点清扫,节省成本,提高设备利用率,实现自动避障、定点清扫和全域清扫。
10.为达到上述目的,本发明提供了一种适用于平铺式光伏电站的清扫装置,该清扫装置包括:
11.清扫本体,用于对平铺式光伏电站的屋面进行清扫;
12.升降支撑系统,可拆卸固定于平铺式光伏电站的屋面上,且升降支撑系统可升降调节其高度;
13.柔性索,第一端与清扫本体连接,第二端与升降支撑系统可拉伸连接,在升降支撑系统调节其升降高度的作用下,拉动或落下柔性索,以带动清扫本体离开或落在平铺式光伏电站的屋面,以避过屋面上的障碍物或对屋面内定点位置进行清扫,进而实现平铺式光伏电站的全面或定点清扫。
14.最优选的,该清扫装置还包括:
15.监控系统,可拆卸固定于平铺式光伏电站的屋面上,且监控系统与升降支撑系统无线连接,用于对清扫本体的工作状态和平铺式光伏电站的屋面环境,进行实时扫描监控,获得监控调控信息,并传输至升降支撑系统;升降支撑系统根据监控调控信息,实时升降调节其高度,以调节清扫本体离开或落在平铺式光伏电站的屋面。
16.最优选的,监控系统包括:
17.支撑杆,可拆卸固定于平铺式光伏电站的屋面上;
18.监控模块,设置于支撑杆顶端,实时监控清扫本体的工作状态和平铺式光伏电站的屋面环境,获得监控状态信息;
19.控制模块,设置于支撑杆上,且控制模块的输入端与监控模块的输出端连接,控制模块的输出端与升降支撑系统无线连接,根据监控状态信息,生成监控调控信息,并传输至升降支撑系统。
20.最优选的,升降支撑系统包括:
21.可升降立柱,可拆卸固定于平铺式光伏电站的屋面上,且可调节升降高度;
22.绞盘机,设置于所述可升降立柱上;且柔性索的第二端可伸缩盘绕在绞盘机上,便于绞盘机可伸缩调节该柔性索的长度,以扩大清扫本体的清扫范围;
23.助力电机,设置于所述可升降立柱上,为可升降立柱调节升降高度提供电能。
24.最优选的,柔性索的个数与升降支撑系统的个数一致。
25.最优选的,升降支撑系统有多个;多个升降支撑系统呈圆周状均匀分布在清扫本体的外周;多个柔性索以清扫本体为中心,成射线状均匀分布。
26.最优选的,清扫本体包括:
27.支撑骨架,与柔性索的第一端连接;
28.扫描定位系统,设置于支撑骨架上,对平铺式光伏电站的屋面进行扫描定位,获得定位信息;
29.清扫模块,设置于支撑骨架底端,且与扫描定位系统连接,根据定位信息,对平铺式光伏电站的屋面进行清扫。
30.最优选的,该清扫装置还包括:泊车位,可拆卸固定于平铺式光伏电站的屋面上,用于清扫本体停泊和充电。
31.本发明还提供了一种适用于平铺式光伏电站的清扫方法,该清扫方法是基于上述的一种适用于平铺式光伏电站的清扫装置实现的;该清扫方法包括以下步骤:
32.步骤1:清扫本体驶离泊车位,开始对平铺式光伏电站的屋面进行清扫;
33.步骤2:监控系统中的监控模块实时监控清扫本体的工作状态和平铺式光伏电站的屋面环境,获得监控状态信息;
34.步骤3:将监控状态信息与控制模块内构建的屋面位置体系进行比对,判定屋面环境是否存在障碍物;若无障碍物,则清扫本体继续清扫;
35.步骤4:若有障碍物,则将监控状态信息传输至控制模块,生成监控调控信息,并传输至升降支撑系统;
36.步骤5:升降支撑系统根据监控调控信息,实时升降调节其高度,以调节清扫本体离开或落在平铺式光伏电站的屋面,以避开屋面内的障碍物,继续进行清扫;
37.步骤6:清扫本体清扫完毕后,驶回泊车位,以完成平铺式光伏电站的屋面的全面清扫。
38.最优选的,该清扫方法还包括:
39.监控系统监测到屋面环境内部存在需要定点清扫的位置,生成定点清扫信息,并传输至升降支撑系统;
40.升降支撑系统调节其绞盘机和可升降立柱,以升降调节升降支撑系统和柔性索的高度,使得清扫本体离开或落在平铺式光伏电站的屋面,以直接到达屋面环境内需要定点清扫的位置进行清扫,以完成屋面的定点清扫。
41.运用此发明,解决了传统清扫设备因无法全域清扫、无法避障、无法定点除尘导致的发电量提升受限、组件热斑等问题,采用可自主升降的升降支撑系统和柔性索,使得清扫本体跨越屋面障碍物,实现了自主避障的同时,能够进行定点清扫,节省了成本,提高了设备利用率,实现了自动避障、定点清扫和全域清扫。
42.相对于现有技术,本发明具有以下有益效果:
43.1、本发明提供的清扫装置,采用可自主升降的升降支撑系统和柔性索,使得清扫本体跨越屋面障碍物,实现了自主避障,降低了全域清扫需要的清扫成本。
44.2、本发明提供的清扫装置,采用可自主升降的升降支撑系统使得清扫本体直接定位至屋面内需要定点清扫的位置处,对定点污染进行清除,节省了时间成本,降低了设备的维护成本,提高了设备利用率。
附图说明
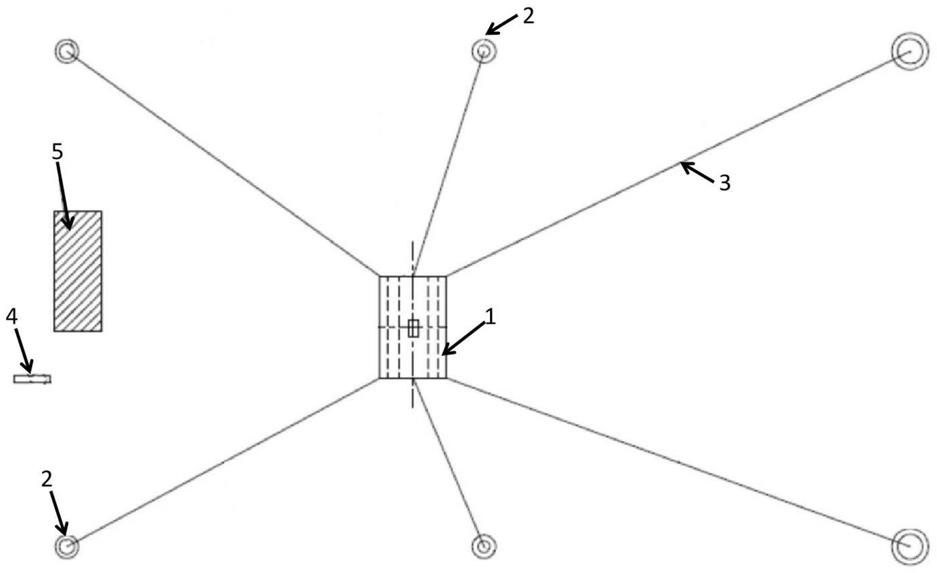
45.图1为本发明提供的清扫装置的结构示意图;
46.图2为本发明提供的清扫本体的结构示意图;
47.图3为本发明提供的升降支撑系统的结构示意图;
48.图4为本发明提供的监控系统的结构示意图。
具体实施方式
49.以下结合附图通过具体实施例对本发明作进一步的描述,这些实施例仅用于说明本发明,并不是对本发明保护范围的限制。
50.本发明是一种适用于平铺式光伏电站的清扫装置,如图1所示,该清扫装置包括:清扫本体1、升降支撑系统2和索性索3。
51.其中,清扫本体1用于对平铺式光伏电站的屋面进行清扫;其中,如图2所示,清扫本体1包括:支撑骨架101、扫描定位系统102和清扫模块103;支撑骨架101;扫描定位系统102设置于支撑骨架101上,对平铺式光伏电站的屋面进行扫描定位,获得定位信息;清扫模块103设置于支撑骨架101底端,且与扫描定位系统102连接,根据定位信息,对平铺式光伏电站的屋面进行清扫;在本实施例中,清扫模块103为毛刷。
52.升降支撑系统2可拆卸固定于平铺式光伏电站的屋面上,且升降支撑系统2可升降调节其高度;如图3所示,升降支撑系统2包括:可升降立柱201、绞盘机202和助力电机203。
53.其中,可升降立柱201可拆卸固定于平铺式光伏电站的屋面的承重结构上,且可调节升降高度;绞盘机202设置于可升降立柱201上;且柔性索3的第二端可伸缩盘绕在绞盘机202上,便于绞盘机202可伸缩调节该柔性索3的长度,以扩大清扫本体1的清扫范围;助力电机203设置于可升降立柱201上,为可升降立柱201升降高度提供电能。
54.柔性索3的第一端与清扫本体1的支撑骨架101连接,第二端与升降支撑系统2可拉伸连接,在升降支撑系统2调节其升降高度的作用下,拉动或落下柔性索3,以带动清扫本体1离开或落在平铺式光伏电站的屋面,以避过屋面上的障碍物或对屋面内定点位置进行清扫,进而实现平铺式光伏电站的全面或定点清扫。
55.其中,柔性索3的个数与升降支撑系统2的个数一致。在本实施例中,升降支撑系统2有多个;多个升降支撑系统2呈圆周状均匀分布在清扫本体1的外周;多个柔性索3以清扫本体1为中心,成射线状均匀分布。
56.在本实施例中,柔性索3和升降支撑系统2的个数均为六个。
57.如图1所示,该清扫装置还包括:监控系统4;监控系统4可拆卸固定于平铺式光伏电站的屋面上,且监控系统4与升降支撑系统2无线连接,用于对清扫本体1的工作状态和平铺式光伏电站的屋面环境,进行实时扫描监控,获得监控调控信息并传输至升降支撑系统2;升降支撑系统2根据监控调控信息,实时升降调节其高度,以调节清扫本体1离开或落在平铺式光伏电站的屋面。
58.其中,如图4所示,监控系统4还包括:支撑杆401、监控模块402和控制模块403;支撑杆401可拆卸固定于平铺式光伏电站的屋面上;监控模块402设置于支撑杆401顶端,实时监控清扫本体1的工作状态和平铺式光伏电站的屋面环境,获得监控状态信息;控制模块403设置于支撑杆401上,且控制模块403的输入端与监控模块402的输出端连接,控制模块403的输出端与升降支撑系统2无线连接,根据监控状态信息,生成监控调控信息,并传输至升降支撑系统2。
59.如图1所示,该清扫装置还包括:泊车位5;泊车位5可拆卸固定于平铺式光伏电站的屋面上,用于清扫本体1停泊和充电。
60.本发明还提供了一种适用于平铺式光伏电站的清扫方法,该清扫方法是基于上述的一种适用于平铺式光伏电站的清扫装置实现的。
61.其中,该清扫装置对平铺式光伏电站的屋面进行清扫之前,还包括以下步骤:
62.监控系统4中的监控模块402对平铺式光伏电站的屋面环境,进行全覆盖扫描监控,获得屋面监控信息;
63.将屋面监控信息传输至监控系统4中的控制模块403;
64.控制模块403根据屋面监控信息,构建出平铺式光伏电站的屋面位置体系。
65.该清扫方法包括以下步骤:
66.步骤1:清扫本体1驶离泊车位5,开始对平铺式光伏电站的屋面进行清扫;
67.步骤2:监控系统4中的监控模块402实时监控清扫本体1的工作状态和平铺式光伏电站的屋面环境,获得监控状态信息;
68.步骤3:将监控状态信息与控制模块403内构建的屋面位置体系进行比对,判定屋
面环境是否存在障碍物;若无障碍物,则清扫本体1继续清扫;
69.步骤4:若有障碍物,则将监控状态信息传输至控制模块403,生成监控调控信息,并传输至升降支撑系统2;
70.步骤5:升降支撑系统2中的可升降立柱201根据监控调控信息,实时升降调节其高度,带动可升降立柱201上的绞盘机202,绞盘机202上盘绕的柔性索3随之上升或下降高度,从而通过上升或下降高度的柔性索3调节清扫本体1离开或落在平铺式光伏电站的屋面,以避开屋面内的障碍物,继续进行清扫;
71.步骤6:清扫本体1清扫完毕后,驶回泊车位5,以完成平铺式光伏电站的屋面的全面清扫。
72.该清扫方法还包括:
73.监控系统4监测到屋面环境内部存在需要定点清扫的位置,生成定点清扫信息,并传输至升降支撑系统2;
74.升降支撑系统2调节其绞盘机202和可升降立柱201,以升降调节升降支撑系统2和柔性索3的高度,使得清扫本体1离开或落在平铺式光伏电站的屋面,以直接到达屋面环境内需要定点清扫的位置进行清扫,以完成屋面的定点清扫。
75.本发明的工作原理:
76.监控系统中的监控模块对平铺式光伏电站的屋面环境,进行全覆盖扫描监控,获得屋面监控信息;将屋面监控信息传输至控制模块;控制模块根据屋面监控信息,构建出平铺式光伏电站的屋面位置体系;清扫本体驶离泊车位,开始对平铺式光伏电站的屋面进行清扫;监控模块实时监控清扫本体的工作状态和平铺式光伏电站的屋面环境,获得监控状态信息;将监控状态信息与屋面位置体系进行比对,判定屋面环境是否存在障碍物;若无障碍物,则清扫本体继续清扫;若有障碍物,则将监控状态信息传输至控制模块,生成监控调控信息,并传输至升降支撑系统;升降支撑系统中的可升降立柱根据监控调控信息,实时升降调节其高度,带动可升降立柱上的绞盘机,绞盘机上盘绕的柔性索随之上升或下降高度,从而通过上升或下降高度的柔性索调节清扫本体离开或落在平铺式光伏电站的屋面,以避开屋面内的障碍物,继续进行清扫;清扫本体清扫完毕后,驶回泊车位,以完成平铺式光伏电站的屋面的全面清扫;监控系统监测到屋面环境内部存在需要定点清扫的位置,生成定点清扫信息,并传输至升降支撑系统;升降支撑系统调节其绞盘机和可升降立柱,以升降调节升降支撑系统和柔性索的高度,使得清扫本体离开或落在平铺式光伏电站的屋面,以直接到达屋面环境内需要定点清扫的位置进行清扫,以完成屋面的定点清扫。
77.综上所述,本发明解决了传统清扫设备因无法全域清扫、无法避障、无法定点除尘导致的发电量提升受限、组件热斑等问题,采用可自主升降的升降支撑系统和柔性索,使得清扫本体跨越屋面障碍物,实现了自主避障的同时,能够进行定点清扫,节省了成本,提高了设备利用率,实现了自动避障、定点清扫和全域清扫。
78.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1