抗位移式智能浮床、生态浮岛、系统及工作方法与流程
1.本发明属于浮床技术领域,尤其是涉及一种抗位移式智能浮床、生态浮岛、系统及工作方法。
背景技术:
2.传统的河湖治理往往会改变生态环境的多样性,导致河流水质变差、生态功能退化。随着生态环境保护力度的加大,生态浮岛技术以其充分利用水域面积、载体材料来源广、浮床易于制作和搬运、净水效率高、不受水位限制且不会造成河道淤积等优点而日益受到青睐。
3.但是实践发现:生态浮岛技术在使用中仍存在一些问题和不足;比如锚固条件受岸坡和岸底基质限制,使用范围受限;单体面积较小,抗风雨效果不佳,自稳定效果较差;机械化操作水平底,管理养护成本大等,这些因素限制了生态浮岛对较大河湖的生态治理与景观营造。
技术实现要素:
4.本发明的目的,就是要提供一种抗位移式智能浮床、生态浮岛、系统及工作方法,不但可以精确的抵消水流和风浪造成的浮床位移,从而自动保持浮床本身或以浮床为中心的生态浮岛在水中的相对位置,而且能够通过上位机远程调整浮床或生态浮岛在水中的位置,同时远程监测所在点位ph值变化情况以及浮床电池电量,其采用的技术方案如下:
5.本技术的第一目的是提供一种抗位移式智能浮床,包括:
6.圆台空心结构的浮床本体,在所述浮床本体的上表面设有太阳能充电装置,在所述太阳能充电装置的顶端设有指示灯;
7.与所述浮床本体下表面连接的平衡连接板;所述平衡连接板的四周设置有锁孔;
8.安装于平衡连接板下方的动力组件;
9.设置于浮床本体内腔的plc模块、用于浮床定位的gps模块;
10.ph值监测单元;其中:
11.所述太阳能充电装置的电源输出端子分别与plc模块、指示灯、动力组件、gps模块和ph值监测单元的电源端子电连接。
12.优选地:所述太阳能充电装置包括:多块光伏组件、位于浮床本体内部的电能控制模块与蓄电池,所述光伏组件依次通过汇流条、电能控制模块与蓄电池的充电端子连接。
13.优选地:所述动力组件包括安装于平衡连接板下表面的半球体;在所述半球体的外壁均匀设置有四组桨叶;每组桨叶连接一台直流电机;在所述半球体的内部设置有驱动电路模块;所述太阳能充电装置的电源输出端子驱动电路模块供电端子连接;所述plc模块通过驱动电路模块与直流电机的控制端子连接。
14.优选地:所述平衡连接板为方形;所述锁孔位于平衡连接板的四个顶点和四条边缘的中部。
15.优选地:所述ph值监测单元包括ph值监测传感器。
16.本技术的第二目的是提供一种抗位移型生态浮岛,包括上述的抗位移式智能浮床;所述平衡连接板通过锁孔与植物浮床单元连接。
17.本技术的第三目的是提供一种抗位移式浮床系统,包括上述的抗位移式智能浮床;在所述浮床本体上设有与plc模块通信用的无线通讯模块,上位机通过无线通讯模块与plc模块进行数据交互。
18.本技术的第四目的是提供一种抗位移式智能浮床的工作方法,基于上述的抗位移式智能浮床实现;至少包括:
19.s1、上位机读取智能浮床定位与电量信息;
20.s2、可视化显示:上位机通过可视化地图显示智能浮床的定位信息,该定位信息包括:经度、纬度、速度、方位角以及浮床中蓄电池的剩余电量百分比,对于剩余电量小于等于15%的浮岛,上位机用红色标出电量低的浮岛,并进行语音报警,提示工作人员及时处理;
21.s3、将电能充足的浮床和普通植物浮床单元拼接成的生态浮岛置于水域边缘;
22.s4、参数设置:根据生态浮岛上植物的特性设置ph值上下限报警阈值、数据采样周期;
23.s5、操控浮岛至目标水域:
24.s6、浮岛切换至抗位移漂浮模式:浮岛到达指定位置后,通过上位机向该浮岛发送模式切换指令,plc模块将gps模块当前定位的经、纬度作为自身原点坐标,并进行存储;此模式下gps模块以周期t2=0.1秒更新经度、纬度、速度、方位角、磁偏角信息并反馈给plc模块,plc模块以周期t3对定位数据进行比对,其中为实现比对防抖,t3=t2/5=0.02秒;当判定发生位移时,plc模块分析出浮床自身在水中的相对位移与状态,并计算出符合四个桨叶各自转速的精确pwm方波,pwm方波经过驱动电路模块放大后传输到四台直流电机,进而控制四个旋叶不同转速与启停状态,使生态浮岛抵消风浪和水流所造成的相对位移,从而保持整个浮岛在水平面上的相对静止状态,进入抗位移漂浮模式;之后plc以周期t3=0.02秒无限重复比对的过程,直至上位机向该浮岛的无线通讯模块发送模式切换指令,则浮岛切换回普通模式;
25.s7、ph值监测:浮岛进入抗位移式漂浮模式后,plc模块启动ph值监测模块,持续监测该区域ph值是否超出阈值,并存储每个采样点的ph值数据;上位机显示某一周期内水体ph值曲线。
26.优选地,所述s1具体为:上位机向智能浮床发出请求回传的指令,智能浮床的gps模块将其定位数据传输到plc模块中,plc模块通过数据分析和处理,将解析后的经度、纬度、速度、方位角、磁偏角信息与蓄电池剩余电量百分比通过无线通讯模块回传至上位机。
27.优选地,所述s5具体为:
28.通过上位机选择待工作的生态浮岛,输入目的地的地理坐标,并向该浮岛的无线通讯模块发送数据,plc模块将接收到数据与gps模块定位信息进行周期性比对,并根据比对结果通过驱动电路模块向四台直流电机分别输出适当频率的pwm方波进而控制与调整动力组件的运行状态,使浮岛到达水中的指定位置,此时gps模块更新定位信息的时间间隔周期t1=0.5秒;
29.或者由工作人员可通过上位机可视化界面中的虚拟摇杆手动操控浮岛到达目标
水域
30.采用本发明的技术方案,具有以下技术效果:
31.1.本技术通过gps定位数据对浮床进行实时定位,并将位置信息发送给plc模块,plc模块处理gps定位数据,判断自身在水中的相对位移,并通过输出端口向驱动电路模块输出pwm方波控制直流电机的运转,进而控制四个旋叶启停与转速,精确的抵消水流和风浪造成的浮床位移,实现浮床在非固定的情况下自动保持在水中的相对位置与稳定性。
32.2.只需要一个抗位移式浮床与数个普通植物浮床单元通过锁扣式连接即可以拼接成为抗位移型生态浮岛,使整个浮岛在水中非固定情况下,实现抗位移的功能,数个普通植物浮床单元共享一个抗位移型浮床单元也大幅节省了成本。
33.3.通过上位机设置控制浮床或所组成的生态浮岛在水中进行抗位移式漂浮的位置,也可以遥控浮床进行靠岸和离岸,同时上位机可以实时监测水体ph值,使浮岛上的水生植物管理与养护更加便捷。
附图说明
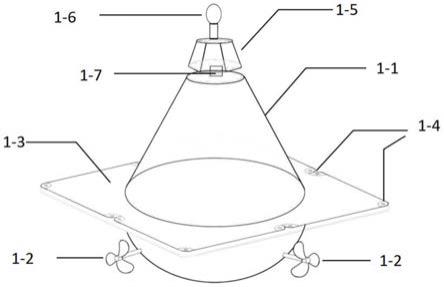
34.图1是本发明优选实施例的抗位移式智能浮床结构示意图。
35.图2是本发明优选实施例的抗位移式智能浮床电气结构示意图。
36.图3是本发明优选实施例的抗位移式生态浮岛结构示意图。
37.图4是本发明优选实施例的抗位移式智能浮床系统结构示意图。
38.图5是本发明优选实施例的抗位移式智能浮床系统的通信示意图。
39.图6是本发明优选实施例的抗位移式智能浮床系统的工作工作方法流程图。
具体实施方式
40.为使贵审查员及公众能进一步了解本发明的特征及其有益效果,特以实施例对本发明的具体实施方式详细描述如下:
41.本发明的技术方案通过抗位移式生态浮岛的构建,采用浮床单元式结构,自由拼装,通过链接扣钉组成各种形状,形成造型美观的生态浮岛,进而推动水生态修复治理与滨水景观营造的技术进步,是一项意义重大且十分迫切的任务。
42.请参阅图1和图2,一种抗位移式智能浮床,圆台空心结构的浮床本体1
‑
1,在所述浮床本体1
‑
1的上表面设有太阳能充电装置,在所述太阳能充电装置的顶端设有指示灯1
‑
6;
43.与所述浮床本体1
‑
1下表面连接的平衡连接板1
‑
3;所述平衡连接板1
‑
3的四周设置有锁孔1
‑
4;
44.安装于平衡连接板1
‑
3下方的动力组件;
45.设置于浮床本体1
‑
1内腔的plc模块2
‑
1、用于浮床定位的gps模块2
‑
2;
46.ph值监测单元2
‑
5;其中:
47.所述太阳能充电装置的电源输出端子分别与plc模块2
‑
1、指示灯1
‑
6、动力组件、gps模块2
‑
2和ph值监测单元2
‑
5的电源端子电连接。
48.上述优选实施例在浮床本体1
‑
1上设有太阳能充电装置,顶端设有指示灯,所述浮床本体中设有plc模块2
‑
1、用于浮床定位的gps模块;所述浮床本体下方设有动力组件、ph
值监测单元2
‑
5,分别与plc模块2
‑
1有线连接,plc模块2
‑
1比对gps模块2
‑
2定位数据,并控制动力组件使所述浮床精确的抵消水流与风浪造成的位移从而自动保持在水中相对位置的静止;在浮床上设有平衡连接板1
‑
3,用于辅助保持平衡,平衡连接板1
‑
3的边缘设有锁孔1
‑
4,用于与普通植物浮床单元拼接成生态浮岛;所述浮床本体1
‑
1上还设有与plc模块2
‑
1通信的无线通讯模块2
‑
6,通过上位机实现远程调节浮岛位置及靠岸、离岸,并且实时监测所在水域水体ph值与浮床蓄电池电量。
49.在上述优选实施例的基础上,所述太阳能充电装置包括:多块光伏组件、位于浮床本体内部的电能控制模块2
‑
7与蓄电池2
‑
8,所述光伏组件依次通过汇流条、电能控制模块与蓄电池的充电端子连接。在本优选实施例中:所述太阳能充电装置包括位于浮床顶部的6块光伏组件1
‑
5(光伏组件的数量根据实际情况选择)和位于浮床本体1
‑
1内部的电能控制模块2
‑
7与蓄电池2
‑
8,光伏组件1
‑
5通过支架1
‑
7安装于浮床本体上表面;太阳能充电装置用于为plc模块2
‑
1、gps模块2
‑
2、动力组件、ph值监测单元2
‑
5提供动力,并自动处理蓄电池充放电转换工作。
50.在上述优选实施例的基础上,所述动力组件包括安装于平衡连接板下表面的半球体;可以将浮床本体1
‑
1和半球体设计制作为一体结构;此时平衡连接板上开设有连接孔,在所述半球体的外壁均匀设置有四组桨叶1
‑
2;每组桨叶连接一台直流电机;所述plc模块2
‑
1通过驱动电路模块2
‑
3与直流电机的控制端子连接;所述太阳能充电装置的电源输出端子分别与四台直流电机的供电端子连接;在本优选实施例中:所述动力组件包括驱动电路模块2
‑
3,第ⅰ直流电机2
‑
41、第ⅱ直流电机2
‑
42、第ⅲ直流电机2
‑
43、第ⅳ直流电机2
‑
44,共4个直流电机,与位于浮床本体下方的4组桨叶,4组桨叶均匀分布在浮床底部半球体的边缘位置,关于浮床呈中心对称分布,且深入水中。所述plc模块2
‑
1通过驱动电路模块2
‑
3与直流电机连接,进而控制4个桨叶的启停与旋转速度。
51.在上述优选实施例的基础上,浮床上设有方形平衡连接板1
‑
3,辅助浮床保持平衡,平衡连接板边缘设有锁孔,分布于连接板的四个顶点和四条边缘的中部,用于与普通植物浮床单元进行锁扣式拼接,成为以浮床为中心的抗位移式生态浮岛,进而实现整个浮岛在水中的抗位移式漂浮。
52.在上述优选实施例的基础上,所述ph值监测单元包括可深入水下的高精度ph值监测传感器。
53.在上述优选实施例的基础上,所述指示灯用于日常浮床位置提示;浮床本体的空腔内设置有电能控制模块2
‑
7,当蓄电池电量低于阈值时,发出低电量报警信号;plc模块内设有ph值报警模块,当ph值位于安全阈值外时,进行ph阈值报警。
54.一种抗位移型生态浮岛,包括上述的抗位移式智能浮床;所述平衡连接板通过锁孔与植物浮床单元连接。
55.一种抗位移式智能浮床系统,包括上述的抗位移式智能浮床或生态浮岛,以及与所述浮床进行无线通信的上位机。
56.实施例一:
57.如图1、2、3所示,一种抗位移式智能浮床,包括浮床本体1
‑
1、浮床本体1
‑
1上设有太阳能充电装置,太阳能充电装置包括光伏组件1
‑
5、电能控制模块2
‑
7、蓄电池2
‑
8;浮床本体1
‑
1的空腔内设有plc模块2
‑
1、用于浮床定位的gps模块2
‑
2,浮床本体1
‑
1下方设有驱动
电路模块2
‑
3与第ⅰ直流电机2
‑
41、第ⅱ直流电机2
‑
42、第ⅲ直流电机2
‑
43、第ⅳ直流电机2
‑
44,四台直流电机用于驱动四组桨叶1
‑
2,浮床本体1
‑
1下方还设有ph值监测单元2
‑
5,所述动力组件和ph值监测单元2
‑
5分别与plc模块2
‑
1连接。
58.太阳能充电装置,包含光伏组件1
‑
5和浮床本体内部的电能控制模块2
‑
7和蓄电池2
‑
8,用于为plc模块2
‑
1、gps模块2
‑
2、动力组件、ph值监测单元2
‑
6提供动力。光伏组件1
‑
5形状为梯形,共6块,呈环绕状均匀的固定在支架1
‑
7上,增加受光面积,减少水生植物p对光照的遮挡。
59.动力组件,包含驱动电路模块2
‑
3和第ⅰ直流电机2
‑
41、第ⅱ直流电机2
‑
42、第ⅲ直流电机2
‑
43、第ⅳ直流电机2
‑
44,直流电机分别连接四组桨叶1
‑
2,四组桨叶1
‑
2均匀的分布在浮床本体1
‑
1底部边缘的位置,关于浮床呈中心对称分布,且深入水中。plc模块2
‑
1根据指令通过驱动电路模块2
‑
3向四组桨叶分别输出适当频率的pwm脉冲进而分别控制四组桨叶1
‑
2各自的启停与旋转速度。因此,当plc模块2
‑
1通过比对gps模块2
‑
2传输的坐标数据判定浮床在水中发生相对位移后,则plc模块2
‑
1通过程序精确控制每组桨叶的不同转速与启停状态,即可准确的保持浮床在水平面上的相对静止状态,以达到抗位移式漂浮的效果。
60.浮床本体1
‑
1的边缘设有方形的平衡连接板1
‑
3,辅助浮床本体保持平衡;所述平衡连接板1
‑
3的边缘设有锁孔1
‑
4,共有12个,通过柔韧的链接扣钉,以锁扣连接的方式与数个普通植物浮床单元c1,c2
…
cn进行拼接,成为抗位移式生态浮岛c,浮床本体1
‑
1通过动力组件对四组桨叶1
‑
2分别进行精确控制与调节,进而实现整个生态浮岛c在水中实现相对静止,达到抗水流、抗风浪的效果,而无需使用锚固,增加浮岛管理便捷度,提升观感美观度。
61.ph值监测单元2
‑
5包括水质ph值传感器,其测量范围0~14ph,测量为精度
±
0.02ph,工作温度0~60℃。
62.浮床本体1
‑
1顶端设有指示灯1
‑
6,用于浮床位置指示、蓄电池低电量报警、水体ph阈值报警,指示灯可呈现4种颜色,浮床状态正常时显示为绿色,蓄电池2
‑
8电量小于等于15%时显示为红色,水体ph值低于等于阈值时显示为蓝色,高于等于阈值时显示为黄色,存在多种异常状态时,异常对应的颜色渐变交替显示,每种颜色间隔周期为3秒。
63.浮床本体1
‑
1上还设有与plc模块通信的无线通讯模块2
‑
6,用于浮床与图4中上位机之间的通讯。
64.如图4、5所示一种抗位移式智能浮床系统包括上述1个或多个生态浮岛c,以及与浮床本体1
‑
1进行无线通信的上位机,在本实施例中,上位机为手机,可以理解,为了提高上位机的性能,也可以采用pc等作为上位机。
65.上位机作为浮床的数据接收、可视化显示、参数设置、浮床控制的终端,功能分为以下四个部分:
66.(1)实时显示:将接收到的最新时刻浮床的位置、水体ph值数据、浮床电池电量数据在可视化界面显示出来。
67.(2)报警功能,在浮床指示灯报警同时,上位机会发出蜂鸣声,并在上位机显示界面中用文字显示出相应的报警原因,提示监控人员及时处理。
68.(3)参数设置:通过上位机可设置水体ph值的报警阈值及数据采样周期,以符合生态浮岛上所种植的植物对水体ph值的要求。
69.(4)控制浮床的动作与工作模式:通过上位机的精确定位或可视化遥控两种方式,
实现浮床或由其所组成的生态浮岛进行靠岸或离岸,通过上位机还可完成浮床的抗位移模式与普通模式的切换。
70.一种抗位移式智能浮床系统的工作工作方法,包括以下步骤,如图6所示:
71.1.上位机读取浮床定位与电量信息:上位机向所有的浮床发出请求回传的指令,每个浮床的gps模块将其定位数据传输到plc模块中,plc模块通过数据分析和处理,将解析后的经度、纬度、速度、方位角、磁偏角信息与蓄电池剩余电量百分比通过无线通讯模块回传至上位机;
72.2.可视化显示:上位机通过可视化地图显示所有浮床的定位信息,包括:经度、纬度、速度、方位角以及浮床中蓄电池的剩余电量百分比,对于剩余电量小于等于15%的浮岛,上位机用红色标出电量低的浮岛,并进行语音报警,提示工作人员及时处理;
73.3.将电能充足的浮床和普通植物浮床单元拼接成的生态浮岛置于水域边缘;
74.4.参数设置:根据生态浮岛上植物的特性设置ph值上下限报警阈值、数据采样周期;
75.5.操控浮岛至目标水域:通过上位机选择待工作的生态浮岛,输入目的地的地理坐标并向该浮岛的无线通讯模块发送数据,plc模块将接收到数据与gps模块定位信息进行周期性比对,并根据比对结果通过驱动电路模块向第ⅰ、ⅱ、ⅲ、ⅳ直流电机分别输出适当频率的pwm方波进而控制与调整动力组件的运行状态,使浮岛自动到达水中的指定位置,此时gps模块更新定位信息的时间间隔周期t1=0.5秒。还可由工作人员可通过上位机可视化界面中的虚拟摇杆手动操控浮岛到达目标水域,其中手动操控的优先级更高,手动操控会终止浮岛的自动行驶过程;
76.6.浮岛切换至抗位移漂浮模式:浮岛到达指定位置后,通过上位机向该浮岛发送模式切换指令,plc模块将gps模块当前定位的经、纬度作为自身原点坐标,并进行存储。此模式下gps模块以周期t2=0.1秒更新经度、纬度、速度、方位角、磁偏角信息并反馈给plc模块,plc模块以周期t3对定位数据进行比对,其中为实现比对防抖,t3=t2/5=0.02秒。当判定发生位移时,plc模块精确的分析出浮床自身在水中的相对位移与状态,并计算出符合四个桨叶各自转速的精确pwm方波,pwm方波经过驱动电路模块放大后传输到第ⅰ、ⅱ、ⅲ、ⅳ直流电机,进而控制四个旋叶不同转速与启停状态,使生态浮岛精确的抵消风浪和水流所造成的相对位移,从而保持整个浮岛在水平面上的相对静止状态,进入抗位移漂浮模式;之后plc以周期t3=0.02秒无限重复比对的过程,直至上位机向该浮岛的无线通讯模块发送模式切换指令,则浮岛切换回普通模式;
77.7.ph值监测:浮岛进入抗位移式漂浮模式后,plc模块启动ph值监测模块,持续监测该区域ph值是否超出阈值,并存储每个采样点的ph值数据。上位机可以显示某一周期内水体ph值曲线,便于工作人员根据曲线范围优化生态浮岛上植物的种类。
78.通过上位机与多个生态浮岛组成的系统及其工作工作方法,工作人员可以同时对单水域或多水域中的多个生态浮岛进行监测与控制。借助gps模块的经度、纬度、速度、方位角、磁偏角信息,dps模块可以准确的分析出当前浮岛的状态,并计算出符合四个桨叶各自转速的精确pwm方波,这使得生态浮岛对于不同水域的适应性更强。
79.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1