一种管道清洁机器人
1.本发明属于生产生活应用领域,特别涉及一种管道清洁机器人。
背景技术:
2.随着社会的进步和城镇化的快速发展,城市管道排水系统发挥着尤为重要的作用。一方面,如今气候多变,在出现短时强降雨暴雨时,需要很畅通的排水系统及时排水,如果稍有堵塞,很容易在局部形成深水坑,对行人行车有很大的安全隐患,发生水涝灾害也是如此,由于瞬时降雨量实在太大,对市区的排水系统提出了极高的要求,管道使用时间久了没有清洁,会有杂物、淤泥等,遇到大雨冲击时,管道就会被堵塞。因此,周期性的进行管道清理十分必要。除了城市排污管道外,很多管道也需要清理,比如炼油厂的管道,如果炼油厂的管道有一点裂缝、老化,就可能爆炸,发生重大事故。为了避免这样的情况,必须定期检查,原始的检查方法都是从管外壁检查,炼油厂的管道外部都包裹很厚的保温防护层,每次检查都要拆下来,十分麻烦,成本高、检查周期长、费时费力,影响工作效率。因此急需一种方便、省时省力、提高工作效率的管道自动清洁装置。
技术实现要素:
3.针对现有管道清理的不合理性,本发明的提供一种管道清洁机器人,能够自动行走,自动完成管道清洁,适应不同大小的管径,由电动机提供动力,使用限制小,适应性强,灵活性好。
4.一种管道清洁机器人,包括有车体、动力传动机构、两组可变直径车轮组和自动清洁装置;动力传动机构安装在车体中,两组可变直径车轮组平行设置在车体上,每组可变直径车轮组包括3个行进轮,3个行进轮等角度分布;自动清洁装置为2个,2个自动清洁装置安装在车体的头、尾两端;
5.所述的动力传动机构的结构是,电机通过联轴器与第一锥齿轮组连接,锥齿轮组与轴固连,轴上安装有轴承,通过固连的第二锥齿轮组将运动传递给安装在机架上的第一带轮,第一带轮通过同步带带动与可变直径车轮组连接的第二带轮运动,同步带的速比为1:2,第一带轮安装在输入端,第二带轮安装在输出端,动力由电机到可变直径车轮组进行传递,整个传动装置利用机械式传动,能很好的适应较恶劣的环境,与其工作环境相适应;
6.所述的行进轮具有八个支架,每个支架外端固定有弧形脚板,每个支架内部安装有弹簧;弹簧的作用是:行进轮采用机械式适应管路直径的变化,当管道直径发生改变时,由于弹簧的存在,行进轮可以时刻保证张紧的状态,也就是说,弧形脚板时刻紧贴管道内壁,保证机器人前进的安全性。
7.所述的自动清洁装置是由圆盘、支撑杆、拉簧、拉簧固定盘、清洁布和脚板构成,开合圆盘是由和构成;拉簧固定盘固定在圆盘内侧,拉簧固定盘的外径小于圆盘的外径,若干支撑杆的内端等角度铰接在圆盘外缘,支撑杆的靠近内端的部位与拉簧固定盘的外缘之间固定拉簧,每个支撑杆的外端铰接脚板,脚板的脚面固定清洁布,车体两侧的自动清洁装置
的支撑杆相对交叉布设,加保证了高质量地完成清洁任务。
8.本发明的有益效果:
9.1、能够自适应管道内部恶劣的工作环境;
10.2、可自动在管道内完成清除污渍、疏通堵塞、探测未知管道等多种任务;
11.3、简化原始操作,省时省力,大幅提升工作效率。
12.4、能自动完成管道清洁,适应不同大小的管径;由电动机提供动力,使用限制小,适应性强,灵活性好;解决了原始管道检查、清洁成本高、检查周期长、费时费力,工作效率低的问题
附图说明
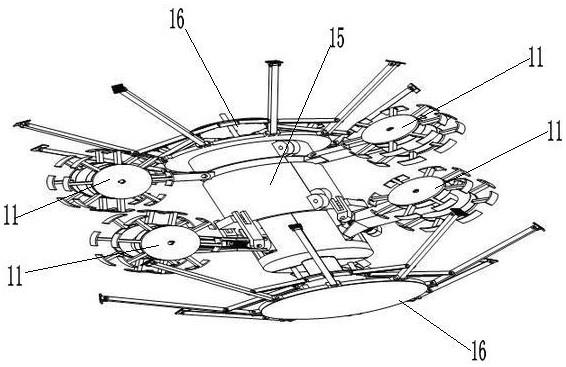
13.图1为本发明的整体结构示意图;
14.图2为本发明的动力传动机构结构示意图;
15.图3为本发明的行进轮结构示意图;
16.图4为本发明的自动清洁装置结构示意图。
具体实施方式
17.如图1、图2、图3和图4所示,一种管道清洁机器人,包括有车体15、动力传动机构、两组可变直径车轮组和自动清洁装置16;动力传动机构安装在车体15中,两组可变直径车轮组平行设置在车体15上,每组可变直径车轮组包括3个行进轮11,3个行进轮11等角度分布;自动清洁装置16为2个,2个自动清洁装置16安装在车体15的头、尾两端;
18.所述的动力传动机构的结构是,电机1通过联轴器2与第一锥齿轮组3连接,锥齿轮组3与轴4固连,轴4上安装有轴承5,通过固连的第二锥齿轮组9将运动传递给安装在机架6上的第一带轮7,第一带轮7通过同步带8带动与可变直径车轮组连接的第二带轮10运动,同步带8的速比为1:2,第一带轮7安装在输入端,第二带轮10安装在输出端,动力由电机1到可变直径车轮组进行传递,整个传动装置利用机械式传动,能很好的适应较恶劣的环境,与其工作环境相适应;
19.所述的行进轮11具有八个支架13,每个支架13外端固定有弧形脚板12,每个支架13内部安装有弹簧14;弹簧的作用是:行进轮11采用机械式适应管路直径的变化,当管道直径发生改变时,由于弹簧14的存在,行进轮11可以时刻保证张紧的状态,也就是说,弧形脚板12时刻紧贴管道内壁,保证机器人前进的安全性;
20.所述的自动清洁装置16是由圆盘17、支撑杆18、拉簧19、拉簧固定盘21、清洁布20和脚板22构成,开合圆盘是由和构成;拉簧固定盘21固定在圆盘17内侧,拉簧固定盘21的外径小于圆盘17的外径,若干支撑杆18的内端等角度铰接在圆盘17外缘,支撑杆18的靠近内端的部位与拉簧固定盘21的外缘之间固定拉簧19,每个支撑杆18的外端铰接脚板22,脚板22的脚面固定清洁布20,车体15两侧的自动清洁装置16的支撑杆18相对交叉布设,加保证了高质量地完成清洁任务。
21.本发明的工作过程:
22.管道清洁机器人在转弯时,三个方向的行进轮11行进线速度不同,因此管道清洁机器人需要实现差速行驶,根据s=vt、v=wr,如果行进轮11的角速度w不变,改变行进轮11
的半径r,即可改变行进轮11的线速度v,进而改变行进轮11在同一时间内走过的路程s,而管道清洁机器人的三个行进轮11无联系,行进状态各自独立,行进轮11又可以根据轮与管道内壁受力大小改变直径,这样就保证了内外侧行进轮11的差速,保证三个行进轮11都在做纯滚动运动。
23.创新性地设计螺旋式前进的行走方式
24.假设伸缩的行进轮11变径范围为1:1.8,只要三个行进轮11在转弯中走过的路程比小于1:1.8,则可以完成转弯;管道清洁机器人的传动布置可以使管道清洁机器人在管道内呈螺旋式前进,当管道清洁机器人在管内螺旋式转弯时,三个朝向的行进轮11转弯走过的路程比就比原来更趋近于1,这样可以使管道适应的转弯半径范围更大,适应更多的管道。
25.考虑到国内大多数管道的管径大小,以及机器人需要有自动转弯的能力,需要设计满足机器人在管道内部90
°
转弯的能力,计算过程如下:
26.因为规定管道的曲率应保持小于其直径的1.5倍的倒数,
27.因此我们取r=1.5*c128.假设长>宽d=c1‑
2*c229.根据公式0<w≤((r+d/2)*sin45
°‑
(r
‑
d/2)),
30.h=2√2*(d/2+r
‑
(r
‑
d/2+w)*cos45
°
)
31.代入数据,得,当长>宽时,
32.0<w≤0.414c1‑
1.707c233.h=(4*√2
‑
2)c1‑
(2*√2+2)c2‑
2*w
34.当长<宽时,同理,根据公式((r+d/2)*sin45
°‑
(r
‑
d/2))<w<dh=2√((d/2+r)2‑
(r
‑
d/2+w)2)
35.代入数据,得,当长<宽时,
36.0.414c1‑
1.707c2<w<c1‑
2c237.h=2*√(4*(c1‑
c2)2‑
(c1+c2+w)2)
38.查阅国家管道尺寸执行标准,带入对应标准的c1、c2值,就可以得到尺寸,最后选择最安全可靠的设计尺寸即可。
39.自动清洁装置同样为了适应管道直径的变化,采用支撑杆18和拉簧19进行调节,拉簧19的作用是适应管径变化,及时伸缩,减小结构内部的应力,提高结构的安全性、稳定性;脚板22上清洁布20能擦除管道内的淤泥、油渍等物质,完成清洁。
40.另外,可以观察到支架座上完成擦除任务装置并不是360
°
布置的,仅这样,不能将管道内壁擦除干净。在传动部分的传动路线中,第二锥齿轮组9是倾斜布置的,由于这样的倾斜导致最终动力传递到行进轮处时,行进轮也将倾斜前进,而不是与管道内壁垂直,行进轮11倾斜,机器人将不再按照直线运动前进,而是在前进的同时还在自转,这样就解决了自动清洁装置16不能完整擦除内壁污渍的问题。
41.车体15两侧的自动清洁装置16的支撑杆18相对交叉布设,更加保证了高质量地完成清洁任务。
42.本发明的智能控制电路部分,采用树莓派控制机器人执行各项任务,在机器人周身布置传感器,树莓派接收到传感器的信号,针对不同的任务、工作环境执行不同的指令。
43.本发明可以在自动清洁装置16的圆盘17处加装钻头,由清洁模式转换为疏通模式,完成开通堵塞管道的任务;另外,如果将自动清洁装置16拆卸下来,给管道清洁机器人加装传感器,就由清洁模式转换为探测模式,可以用于探测未知管路,而且由于管道清洁机器人结构设计的优越性,管道清洁机器人螺旋前进,不需要将传感器周身布置,就可以全面的探测管道内部状况,节约成本,减少机器人结构的复杂程度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1