多功能机器人的制作方法
1.本发明涉及机器人技术领域,具体涉及一种多功能机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,现在的机器人一般为专用的机器人,无法适应多个场景,影响了适用范围。
技术实现要素:
3.本发明实施例提供了一种多功能机器人,可以实现多个领域的应用,提高适用范围。
4.第一方面,本发明实施例提供一种多功能机器人,包括:底座、四个拉力部、若干个弹性部以及若干个堆叠设置的转动机构,还包括:安装在底座上的第一电机、第二电机、第三电机、第四电机;四个拉力部沿转动机构的堆叠方向延伸,且均匀阵列分布于转动机构的周侧,弹性部套设于四个拉力部的外侧,且抵接于转动机构;拉力部的一端连接于远离底座一侧的转动机构,拉力部的另一端连接于第一电机、第二电机、第三电机和第四电机;当第一电机开启使得与第一电机连接的拉力部收缩时,拉力部带动弹性部压缩,转动机构产生变形,朝向第一电机拉伸的一侧倾斜。
5.可选的,第一电机和第二电机分别位于底座的相对两侧,第三电机和第四电机分别位于底座的相对两侧,第一电机位于第三电机的正上方,第二电机位于第四电机的正上方,第一电机和第二电机的输出轴分别连接于四个拉力部中的两个,第三电机的输出轴连接于第一齿轮,第四电机的输出轴连接于第二齿轮。
6.可选的,多功能机器人还包括第一转轴、第二转轴、第三齿轮和第四齿轮,第三齿轮套设于第一转轴,且第三齿轮啮合于第一齿轮,第四齿轮套设于第二转轴,且第四齿轮啮合于第二齿轮;第一转轴和第二转轴分别连接于四个拉力部l中的剩下两个,第一转轴和第二转轴平行间隔设置,且二者均连接于底座之间。
7.可选的,转动机构包括第一铰接部、第二铰接部、转动部、第一轴部和第二轴部,第一铰接部、转动部通过第一轴部活动连接,第二铰接部、转动部通过第二轴部活动连接。
8.可选的,第一铰接部相对于第二铰接部沿y轴方向旋转了90
°
,第一铰接部和第二铰接部上分别设置有四个凸起部,拉力部贯穿凸起部将若干个转动机构连接在一起;弹性部套设于上下两组凸起部的外侧,凸起部用于对弹性部起到限位作用。
9.可选的,多功能机器人还包括第一滚珠轴承、第二滚珠轴承、第一卡簧、第二卡簧、第三卡簧、第四卡簧、第一端盖和第二端盖,第一铰接部的中部开设有凹槽,转动部收容于凹槽内,且与第一铰接部之间形成间隙,第一轴部贯穿转动部,以将转动部活动连接于第一铰接部,第一轴部为阶梯轴,第一滚珠轴承安装于第一轴部位于第一铰接部向外的一侧,第一滚珠轴承包括可相对转动的内圈和外圈,所述内圈连接于阶梯轴的台阶部位,且与第一轴部过盈配合,所述外圈通过第一端盖抵接于第一铰接部,第一卡簧卡接于第一滚珠轴承远离第一铰接部的一侧,且第一卡簧抵接于所述内圈的侧壁,且不会对内圈和外圈之间的相对转动形成干涉,第一卡簧用于对第一轴部进行轴向限位,通过第一卡簧和第一轴部对内圈进行限位,通过第一端盖和转动部对外圈进行限位,将第一卡簧固定于第一轴部的预设位置。
10.可选的,第一铰接部包括可拆卸连接的第一部分和第二部分,第一部分和第二部分围设形成所述凹槽。
11.实施本发明实施例,具有如下有益效果:可以看出,本技术实施例提供的多功能机器人可以应用于医学领域,例如,用于喉镜探测,还可以用于管道清理领域,例如,管道垃圾处理,还可以应用于复杂环境中的救援工作,因此其可以适应多个应用范围,具有适用范围广的优点。
附图说明
12.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
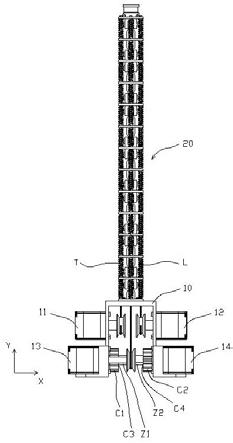
13.图1是本技术实施例提供的一种多功能机器人的结构示意图,图2是图1中多功能机器人的局部结构示意图,图3是图2中结构的局部结构示意图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.本发明的说明书和权利要求书及所述附图中的术语“第一”、“第二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
16.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结果或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同
的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
17.参阅图1-图3,本技术实施例提供了一种多功能机器人1,也可以称为柔性机器人,多功能机器人1包括底座10、第一电机11、第二电机12、第三电机13、第四电机14、四个拉力部l、若干个弹性部t以及若干个堆叠设置的转动机构20,第一电机11、第二电机12、第三电机13、第四电机14均安装于底座10,四个拉力部l沿转动机构20的堆叠方向延伸,且均匀阵列分布于转动机构20的周侧,弹性部t为弹簧,套设于四个拉力部l的外侧,且抵接于转动机构20。拉力部l的一端连接于远离底座10一侧的转动机构20,拉力部l的另一端连接于第一电机11、第二电机12、第三电机13和第四电机14。当第一电机11开启使得与第一电机11连接的拉力部l收缩时,拉力部l带动弹性部t压缩,转动机构20产生变形,朝向第一电机11拉伸的一侧倾斜,从而实现多功能机器人1的蛇形运动,实现相应的功能,同时,由于弹性部t的存在,使得多功能机器人1整体上保持一定的刚性,对多功能机器人1的整体起到支撑作用,提升多功能机器人1在执行抓取、探测等任务时的牢靠性。
18.其中,第一电机11和第二电机12分别位于底座10的相对两侧,第三电机13和第四电机14分别位于底座10的相对两侧,第一电机11位于第三电机13的正上方,第二电机12位于第四电机14的正上方,第一电机11和第二电机12的输出轴分别连接于四个拉力部l中的两个,第三电机13的输出轴连接于第一齿轮c1,第四电机14的输出轴连接于第二齿轮c2。多功能机器人1还包括第一转轴z1、第二转轴z2、第三齿轮c3和第四齿轮c4,第三齿轮c3套设于第一转轴z1,且第三齿轮c3啮合于第一齿轮c1,第四齿轮c4套设于第二转轴z2,且第四齿轮c4啮合于第二齿轮c2。第一转轴z1和第二转轴z2分别连接于四个拉力部l中的剩下两个,第一转轴z1和第二转轴z2平行间隔设置,且二者均连接于底座10之间。通过控制四个电机的正反转以及开启和关闭,可以使得多功能机器人1改变不同的弯曲形状,可以较为灵活的应用于立体空间进行工作。且采用较为对称的结构排布,可以使得多功能机器人1的受力较为均匀,有助于提升工作时的稳定性,延长使用寿命。
19.转动机构20包括第一铰接部210、第二铰接部220、转动部230、第一轴部240和第二轴部250,第一铰接部210、转动部230通过第一轴部240活动连接,第二铰接部220、转动部230通过第二轴部250活动连接,两部分的连接方式相同。第一铰接部210相对于第二铰接部220沿y轴方向旋转了90度,第一铰接部210和第二铰接部220上分别设置有四个凸起部m,拉力部l贯穿凸起部m将若干个转动机构20连接在一起。弹性部t套设于上下两组凸起部m的外侧,凸起部m用于对弹性部t起到限位作用,确保弹性部t始终相对转动机构20处于预设位置,提高多功能机器人1工作的稳定性。下面以第一铰接部210、转动部230和第一轴部240三者之间的连接为例进行说明,多功能机器人1还包括第一滚珠轴承30、第二滚珠轴承35、第一卡簧40、第二卡簧45、第三卡簧50、第四卡簧55、第一端盖60和第二端盖65,第一铰接部210的中部开设有凹槽j,转动部230收容于凹槽j内,且与第一铰接部210之间形成间隙,第一轴部240贯穿转动部230,以将转动部230活动连接于第一铰接部210,其中,间隙可以为2-5mm。第一轴部240为阶梯轴,第一滚珠轴承30安装于第一轴部240位于第一铰接部210向外的一侧,第一滚珠轴承30包括可相对转动的内圈n和外圈w,所述内圈n连接于阶梯轴的台阶部位,且与第一轴部240过盈配合,所述外圈w通过第一端盖60抵接于第一铰接部210,第一卡簧40卡接于第一滚珠轴承30远离第一铰接部210的一侧,且第一卡簧40抵接于所述内圈n
的侧壁,且不会对内圈n和外圈w之间的相对转动形成干涉,第一卡簧40用于对第一轴部240进行轴向限位,通过第一卡簧40和第一轴部240对内圈n进行限位,通过第一端盖60和转动部230对外圈w进行限位,可以将第一卡簧40固定于第一轴部240的预设位置,有效的防止第一轴部240沿轴向发送晃动,提升了多功能机器人1的稳定性。针对第二滚珠轴承35、第二卡簧45以及第二端盖65的连接与上述方式相同,不再赘述。此外,转动部230与第一轴部240的连接部位分别开设有第一卡位k1和第二卡位k2,第一轴部240与转动部230的连接部位分别开设有第三卡位k3和第四卡位k4,第一卡位k1和第三卡位k3正对设置用于安装第三卡簧50,第二卡位k2和第四卡位k4正对设置用于安装第四卡簧55,第三卡簧50和第四卡簧55相互配合用于将转动部230卡接于第一轴部240的预设位置,使得二者始终保持同步转动,避免二者之间产生位移,有助于进一步提升多功能机器人1工作的稳定性。
20.进一步的,第一铰接部210包括可拆卸连接的第一部分211和第二部分212,第一部分211和第二部分212围设形成所述凹槽j,转动机构20采用如下的方式进行安装,先将第一轴部240和转动部230之间形成配合,使得第一卡位k1对齐第三卡位k3,第二卡位k2对齐第四卡位k4,然后将第三卡簧50和第四卡簧55分别卡入第三卡位k3和第四卡位k4,以将转动部230固定于第一轴部240的预设位置;然后再将第一部分211和第二部分212进行拼接,接着将第一滚珠轴承30和第二滚珠轴承35安装于第一轴部240的台阶位置,接着再将第一卡簧40和第二卡簧45卡接于第一轴部240上,且分别抵接于第一滚珠轴承30和第二滚珠轴承35的内圈,最后安装第一端盖60和第二端盖65,且分别抵接于第一滚珠轴承30和第二滚珠轴承35的外圈,本技术提供的多功能机器人1具有定位准确,连接牢靠,稳定性高的特点。
21.以上对本发明实施例进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1