一种光伏电站清洗机器人和自动校准及换行策略
1.本发明涉及光伏电站清洗机器技术领域,尤其涉及一种光伏电站清洗机器人和自动校准及换行策略。
背景技术:
2.目前,光伏电站常用的清洗方法还是以人工清洗、大型清洗机器清洁为主,小型的智能清洗机器研究技术还尚未成熟,存在很多难题。人工清洁光伏电站时,依靠拖把、抹布或者直接用水冲洗,这样的清洁方式不仅效率低下而且清洁成本过高;大型清洗机器需要人为控制,不具备智能化,并且对光伏板的行间距要求较高。
3.经检索发现中国发明专利申请cn110385294a,公开了一种用于光伏发电厂的光伏板清洗设备,包括固定安装在地面上的轨道和支撑臂,支撑臂底面左右对称固定安装两对支柱,支柱底面上转动安装车轮,车轮可以在轨道上滚动,当启动清洗电机时,清洗电机带动清理轴转动,清理轴转动带动清洗刷转动对光伏板进行清洗。其主要创新在于:支撑臂在轨道上按轨迹行走,并且设置了废水回收装置。其缺陷在于:轨道铺设成本高,行动不灵活。
4.如何解决上述技术问题为本发明面临的课题。
技术实现要素:
5.本发明的目的在于提供一种光伏电站清洗机器人和自动校准及换行策略,其成本低,使用方便,无需轨道,可以大规模推广和应用。
6.本发明是通过如下措施实现的:一种光伏电站清洗机器人和自动校准及换行策略,其中,包括支撑平台,所述支撑平台固定安装有四根支柱,所述四根支柱底面固定安装有第一步进电机,所述第一步进电机转轴上固定安装转台,所述转台上固定安装第二步进电机,所述第二步进电机的转轴上连接车轮,所述支撑平台为长方形盒体,所述支撑平台的底面上固定安装有蓄水箱、两个抽水泵、两个喷水头、两个空腔u形导轨、控制系统电路、蓄电池,所述蓄水箱上盖面设有进水口,侧面下方设有两个出水口,所述出水口通过水管连接到两个抽水泵,抽水泵通过水管连接到两边喷水头,所述空腔u形导轨的横边与支撑平台长方形底面的短边重合,所述沿空腔u形导轨悬挂有若干织物传感器,所述织物传感器用于确定清洗机器人与光伏板的位置关系并实现循迹换行的功能,所述支撑平台内侧壁固定安装有第三步进电机,短边一侧内壁固定第三步进电机,第三步进电机与丝杆顶端固定,丝杆尾端可旋转地固定于另一侧短边内壁,所述第三步进电机高于空腔u形导轨上平面,丝杆尾端高于空腔u形导轨上平面,所述丝杆上旋转装有法兰螺母滑块,法兰螺母滑块与清洗组件固定连接,所述丝杆正下方的支撑平台开有槽口用于通过清洗组件,所述槽口两端各放置一限位开关,所述清洗组件由直流电机、第一橡胶刮条、绞龙状清洗刷、第二橡胶刮条组成,所述清洗组件前后安排顺序对应清洗流程,所述第一橡胶刮条用于松动顽固鸟粪等污渍,所述绞龙清洗刷用于旋转刷洗光伏板,所述第二橡胶刮条用于刮干光伏板面水分,所述清洗组件的前后长边的四个拐角处安装有光电传感器,所述清洗组件侧面各安装一光电传感
器。
7.进一步地,所述第一步进电机用于转向,第二步进电机用于驱动机器人前进。
8.进一步地,所述空腔u形导轨下平面开槽,所述织物传感器通过滑轮结构悬挂于空腔u形导轨下。
9.进一步地,所述滑轮结构由两个小轮及连接横杆组成,所述小轮的直径小于u型导轨内腔高度,所述相邻两个滑轮结构通过绳带绑定横杆连接。
10.进一步地,所述织物传感器按数量均匀分布在所述u形轨道的中线两边,所述中线两边第一个织物传感器的横杆为直流电机,用于带动一侧其他织物传感器移动,其他则为普通横杆连接两小轮。
11.进一步地,所述每个u形轨道内部设置四个限位开关,分别设置在中线两侧和两个拐角处,所述直流电机上固定以挡块,所述挡块用以触发限位开关实现定位并停止运动。
12.进一步地,所述织物传感器由四层组成,分别为第一织物传感层、第一金属导电层、第二金属导电层、第二织物传感层。
13.进一步地,所述第一织物传感层及第二织物传感层以织物作为基底,将金属导电纤维以刺绣方式在长方形织物基底上正反刺绣以中心线为对称轴的长方形传感区域。
14.进一步地,所述清洗组件整体长度为光伏板深色块的长度。
15.进一步地,所述清洗组件与法兰螺母滑块通过带丝杆的直流电机与带螺母的直杆连接,用于升降清洗组件。
16.进一步地,所述带螺母的丝杆上端与螺母侧边固定,所述带螺母的丝杆下端装有第四步进电机,用于调整清洗组件的倾斜角度。
17.进一步地,所述清洗组件具有一个固定初始倾斜角度,清洗前根据光伏板角度调整后下降,清洗完成后清洗组件抬起后恢复初始角度。
18.为了更好地实现上述发明目的,本发明还提供了一种光伏电站清洗机器人的清洗方法,包括以下过程:初始状态清洗组件位于前进方向最前端,机器人前进过程中喷水,待机器人定位到第一块光伏板,清洗组件向后运动,直到触碰到后端限位开关,清洗组件下降到接触光伏板面,清洗组件向前运动,直至触碰到前端限位开关,清洗组件抬升,机器人向前运动清洗下一块光伏板。
19.为了更好地实现上述发明目的,本发明又提供了一种光伏电站清洗机器人的自动校准策略,包括以下内容:初始状态将清洗机器人放置在光伏电站最北一行或最南一行前端,此时面向光伏板一端的织物传感器均匀分布在机器人前端,机器人后端的织物传感器收于机器人两侧,机器人向前运动至织物传感器触碰到光伏板侧边,通过以u形轨道中线两边接触到的织物传感器数量确定机器人是否正对光伏板,如果一侧接触的传感器数量多于另一侧,车轮向多的一侧转向90
°
调整位置直至两侧接触到的织物传感器数量相等,此时机器人正对光伏板的侧边,同时根据最左和最右两个织物传感器接触光伏板的高度得到光伏板的摆放角度的数值,并且计算出中心点的高度,从而确定清洗组件的下降高度及调整角度,调整完成后前端织物传感器收于机器人两侧,机器人继续前进,前进过程中清洗组件两侧光电传感器检测光伏板两边的白边,清洗织物传感器前后端光电传感器检测光伏板深色区域,若同一侧有两个织物传感器检测颜色相同则发生偏移,机器人调整位置前进,若发生偏移严重触碰到侧面织物传感器,机器人停止运动,调整好角度后继续运动。当前端两个光
电传感器同时检测到白边说明机器人定位覆盖了一块光伏板,此时清洗组件开始工作。清洗完成后机器人前进,若光电传感器都没检测到白边,接着又同时检测到白边,说明进入下一块光伏板,往复之前过程,若一直未检测到白边则此行结束。
20.为了更好地实现上述发明目的,本发明又提供了一种光伏电站清洗机器人的自动换行策略,包括以下内容:若一行结束,机器人向前运动一块光伏板长度后第一步进电机转动90
°
向下一行前进一块光伏板的宽度,若运动过程中侧面织物传感器接触到光伏板的侧边,则说明此行比上一行长,则第一步进电机转动90
°
沿着光伏板边向沿长方向运动,直至织物传感器接触不到光伏板边,第一步进电机转动90
°
移动一块光伏板的宽度,此时前端两侧织物传感器运动到机器人前端,向前运动触碰光伏板侧边。若一行结束,机器人向前运动一块光伏板长度后第一步进电机转动90
°
向下一行前进一块光伏板的宽度,若运动过程中侧面织物传感器未接触到光伏板的侧边,则说明下一行比上一行短或光伏站清洗完成,此时前端两侧织物传感器运动到机器人前端,第一步进电机转动90
°
向光伏板方向前进,若触碰到光伏板则进行定位清洗过程,若一直未触碰到光伏板侧面则沿上一行的侧边回到上一行的起点,准备下一次光伏电站的清洗。
21.与现有技术相比,本发明的有益效果为:
22.(1)本发明可以自动在光伏电站对光伏板进行板面清洗,使用过程中只需将清洗机器人摆放在光伏电站最北或最南一行光伏板前,便可以自动校准、换行、清洗。
23.(2)本发明提出的机器人结构稳定,支撑平台通过支柱支撑悬于光伏板上方,该结构对光伏板行间距要求较低,可以适应大多数的光伏电站。
24.(3)本发明提出采用织物传感器作为循迹换行的感知方法,能够在机器人与光伏板软接触的情况感知光伏板与机器人的相对位置,避免了机器人与光伏板碰撞从而造成光伏板损坏,并且通过织物传感器感知光伏板角度,能够准确调整清洗组件角度,使清洗组件完全贴合光伏板,具有较好的清洗效果。
25.(4)本发明设置的清洗组件采用绞龙状清洗刷,能够通过旋转轻松地将污水、灰尘擦离光伏板面,并将污水、灰尘传送到脱离光伏板底部。
26.(5)本发明使用织物传感器配合光电传感器实现在板上行走实时调整,保证了清洗机器人与光伏板平行,避免了清洗机器人发生偏移。
附图说明
27.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
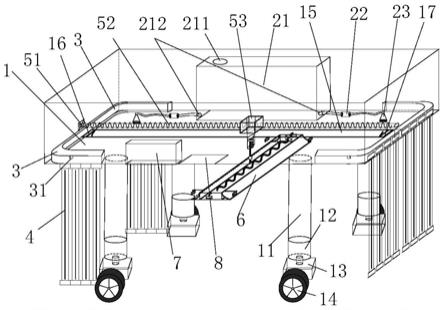
28.图1为本发明的整体结构示意图。
29.图2为本发明中清洗组件结构的示意图。
30.图3(a)为本发明中关于织物传感器与u形导轨连接示意图。
31.图3(b)为本发明中关于织物传感器测量电路示意图。
32.图4为本发明的电原理框图。
33.图5为本发明换行策略示意图。
34.其中,附图标记为:1、支撑平台;3、空腔u形导轨;4、控制电路板;11、支柱;12、第一步进电机;13、为第二步进电机;14、车轮;15、槽口;16、17为限位开关一;21、蓄水箱;211、蓄
水箱进水口;212、蓄水箱出水口;22、抽水泵;23、喷水头;3、空腔u形导轨;31、限位开关二;40、织物传感器;41、滑轮结构;411、小轮;412、横杆;413、挡块;42、第一传感层;43、第一金属层;44、第二金属层;45、第二传感层;51、第三步进电机;52、丝杆;53、法兰螺母滑块;6、清洗组件;61、直流电机;62、第一橡胶刮条;63、绞龙状清洗刷;64、第二橡胶刮条;65、光电传感器;66、带丝杆的直流电机;67、带螺母的直杆;68、第四步进电机;7、为蓄电池;8、控制中心。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。当然,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
36.实施例1
37.参见图1至图5,本发明提供其技术方案为,一种光伏电站清洗机器人和自动校准及换行策略,包括支撑平台1,所述支撑平台1固定安装有四根支柱11,所述四根支柱11底面固定安装有第一步进电机12,所述第一步进电机12转轴上固定安装转台,所述转台上固定安装第二步进电机13,所述第二步进电机13的转轴上连接车轮14,所述第一步进电机12用于转向,第二步进电机13用于驱动机器人前进,所述支撑平台1为长方形盒体,所述支撑平台1的底面上固定安装有蓄水箱21、两个抽水泵22、两个喷水头23、两个空腔u形导轨3、控制电路板4、蓄电池7,所述蓄水箱21上盖面设有进水口211,侧面下方设有两个出水口212,所述出水口212通过水管连接到两个抽水泵22,抽水泵22通过水管连接到两边喷水头23,所述空腔u形导轨3的横边与支撑平台1长方形底面的短边重合,所述沿空腔u形导轨3悬挂有若干织物传感器40,所述织物传感器40用于确定清洗机器人与光伏板的位置关系并实现循迹换行的功能,所述支撑平台1内侧壁固定安装有第三步进电机51,短边一侧内壁固定第三步进电机51,第三步进电机51与丝杆52顶端固定,所述丝杆52尾端可旋转地固定于另一侧短边内壁,所述第三步进电机51高于空腔u形导轨3上平面,丝杆52尾端高于空腔u形导轨3上平面,所述丝杆52上旋转装有法兰螺母滑块53,法兰螺母滑块53与清洗组件6固定连接,所述丝杆52正下方的支撑平台1开有槽口15用于通过清洗组件6,所述槽口15两端各放置一限位开关16、17。
38.优选地,所述清洗组件6由直流电机61、第一橡胶刮条62、绞龙状清洗刷63、第二橡胶刮条64组成,所述清洗组件7前后安排顺序对应清洗流程,所述第一橡胶刮条61用于松动顽固鸟粪等污渍,所述绞龙清洗刷62用于旋转刷洗光伏板,所述第二橡胶刮条63用于刮干光伏板面水分,所述清洗组件6的前后长边的四个拐角处安装有光电传感器65,所述清洗组件6侧面各安装一光电传感器65,所述清洗组件6整体长度为光伏板深色块的长度。
39.优选地,所述清洗组件6与法兰螺母滑块53通过带丝杆的直流电机66与带螺母的直杆67连接,用于升降清洗组件6。
40.优选地,所述带螺母的直杆上67端与螺母侧边固定,所述带螺母的丝杆67下端装有第四步进电机68,用于调整清洗组件6的倾斜角度。
41.优选地,所述清洗组件6具有一个固定初始倾斜角度0
°
,清洗前根据光伏板摆放角度调整好后下降,清洗完成后清洗组件6抬起后恢复初始角度。
42.优选地,所述空腔u形导轨3下平面开槽,所述织物传感器40通过滑轮结构41悬挂于空腔u形导轨3下,所述滑轮结构41由两个小轮411及连接横杆412组成,所述小轮411的直径小于u型导轨3内腔高度,所述相邻两个滑轮结构41通过绳带绑定横杆412连接,所述织物传感器40按数量均匀分布在所述u形轨道3的中线两边,所述中线两边第一个织物传感器40的横杆413为直流电机,用于带动一侧其他织物传感器40移动,其他则为普通横杆连接两小轮411,所述每个u形轨3道内部设置四个限位开关31,分别设置在中线两侧和两个拐角处,所述直流电机上固定以挡块413,所述挡块413用以触发限位开关31实现定位并停止运动。
43.优选地,所述织物传感器40由四层组成,分别为第一织物传感层42、第一金属导电层43、第二金属导电层44、第二织物传感层45,所述第一织物传感层42及第二织物传感层45以织物作为基底,将金属导电纤维以刺绣方式在长方形织物基底上正反刺绣以中心线为对称轴的长方形传感区域。
44.优选地,本发明中传感器信号检测过程如下:
45.模拟信号检测即测量电阻值的连续变化,在第一织物传感层42和第二织物传感层45两端连接电阻测量电路,可根据电阻值的变化判断光伏板接触传感器的深浅;第一织物传感层42顶端与第一金属导电层43连接到另一电阻测量电路,若第一织物传感层42接触到第一金属导电层43时,第一织物传感层42顶端与第一金属导电层43连接到电阻测量电路,第一织物传感层42顶端到第一金属导电层43接触点时的电阻可以判断光伏板与传感器接触的高度。电路控制逻辑:
46.本发明的控制电路板4的输入有限位开关一16、17,限位开关二31,光电传感器65、织物传感器40,输出控制器件有直流电机61、直流电机66、第三步进电机51、第一步进电机12、第二步进电机13、第三步进电机51、第四步进电机68、抽水泵22,输入器件将信号采集到控制中心8,由控制中心8处理后控制相应的输出器件工作,例如在光伏板上行走时,前进方向一排光电传感器65检测到光伏板的白边,则机器人已覆盖一块光伏板,此时,控制中心8控制第二步进电机13停止转动,是机器人停止后完成清洗工作。
47.清洗过程:
48.初始状态清洗组件位于前进方向最前端,机器人前进过程中喷水,待机器人定位到第一块光伏板,清洗组件6向后运动,直到触碰到后端限位开关16,清洗组件6下降到接触光伏板面,清洗组件6向前运动,直至触碰到前端限位开关一16、17,清洗组件6抬升,机器人向前运动清洗下一块光伏板。
49.自动校准策略:
50.初始状态将清洗机器人放置在光伏电站最北一行或最南一行前端,此时面向光伏板一端的织物传感器均匀分布在机器人前端,机器人后端的织物传感器40收于机器人两侧,机器人向前运动至织物传感器40触碰到光伏板侧边,通过以u形轨道3中线两边接触到的织物传感器40数量确定机器人是否正对光伏板,如果一侧接触的传感器4数量多于另一侧,车轮14向多的一侧转向90
°
调整位置直至两侧接触到的织物传感器40数量相等,此时机器人正对光伏板的侧边,同时根据最左和最右两个织物传感器40接触光伏板的高度计算获得光伏板的摆放角度,并且计算出中心点的高度,从而确定清洗组件6的下降高度及调整角度,调整完成后前端织物传感器40收于机器人两侧,机器人继续前进,前进过程中清洗组件6两侧光电传感器65检测光伏板两边的白边,清洗组件6前后端光电传感器65检测光伏板深
色区域,若同一侧有两个织物传感器40检测的颜色相同则发生偏移,机器人调整位置前进,若发生偏移严重触碰到侧面织物传感器40,机器人停止运动,调整好角度后继续运动。当前端两个光电传感器65同时检测到白边说明机器人定位覆盖了一块光伏板,此时清洗组件6开始工作。清洗完成后机器人前进,若光电传感器65都没检测到白边,接着又同时检测到白边,说明进入下一块光伏板,往复之前过程,若一直未检测到白边则此行结束。
51.自动换行策略:
52.若一行结束,机器人向前运动一块光伏板长度后第一步进电机12转动90
°
向下一行前进一块光伏板的宽度,若运动过程中侧面织物传感器40接触到光伏板的侧边,则说明此行比上一行长,则第一步进电机12转动90
°
沿着光伏板边向沿长方向运动,直至织物传感器40接触不到光伏板边,第一步进电机12转动90
°
移动一块光伏板的宽度,此时前端两侧织物传感器40运动到机器人前端,向前运动触碰光伏板侧边。若一行结束,机器人向前运动一块光伏板长度后第一步进电机12转动90
°
向下一行前进一块光伏板的宽度,若运动过程中侧面织物传感器40未接触到光伏板的侧边,则说明下一行比上一行短或光伏站清洗完成,此时前端两侧织物传感器40运动到机器人前端,第一步进电机转动90
°
向光伏板方向前进,若触碰到光伏板则进行定位清洗过程,若一直未触碰到光伏板侧面则沿上一行的侧边回到上一行的起点,准备下一次光伏电站的清洗。
53.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1