一种智能全自动清洗排污一体式刷锅机
1.本实用新型属于厨房设备技术领域,具体涉及一种智能全自动清洗排污一体式刷锅机。
背景技术:
2.在家庭生活中,或者食堂、饭店内,洗刷锅碗几乎是不可避免的,尤其是只要用锅炒菜就得刷锅;目前,刷锅通常是需要人亲手去刷,刷锅这一过程还会耗用人们的体力、占用人们的时间,同时锅内的油脂、洗洁精等都会沾到手上,让人感觉不舒适,而且洗涤液中的化学成分还会损伤皮肤,不利于提升生活品质。
3.在市面上一般的锅具刷洗设备一般为以下三类:只具有自动添加清洁剂功能的清洁刷,该种清洁刷仍需要用户自行进行刷洗,需要消耗大量精力,刷洗过程复杂;具有单一电动辅助功能的刷锅器,需人为调节固定装置以配合不同尺寸的锅具,刷洗过程中需人力供给水源和清洁剂,自动化程度低,且不能够自动排水滤污;洗碗机,能够对碗具、锅具进行清洁,但是洗碗机一般只适用于小型碗具,不能适用于大尺寸锅具。
技术实现要素:
4.为解决上述问题,提供一种智能全自动清洗排污一体式刷锅机,本实用新型采用了如下技术方案:
5.本实用新型提供了一种智能全自动清洗排污一体式刷锅机,用于对锅具进行清洗,其特征在于,包括:机架;翻转机构,与机架相铰接,用于固定锅具;洗刷机构,安装在机架上,包括第一传感器、第二传感器、抬升组件、竖直伸缩组件、水平伸缩组件、侧壁刷头以及底面刷头;以及排水机构,包括翻转传感器以及与翻转机构相匹配设置的液体容纳部,其中,竖直伸缩组件转动连接在抬升组件的一端,水平伸缩组件安装在竖直伸缩组件的一端且垂直于竖直伸缩组件,侧壁刷头以及底面刷头分别设置在水平伸缩组件靠近锅具内壁的一端以及靠近锅具底面的一侧,第一传感器以及第二传感器分别感应锅具的深度以及直径,竖直伸缩组件以及水平伸缩组件分别根据第一传感器以及第二传感器的感应结果沿竖直方向以及水平方向伸缩,使得侧壁刷头以及底面刷头分别与锅具的内壁以及底面相贴合,翻转传感器感应抬升机构是否进行抬升,翻转机构根据翻转传感器的感应结果进行翻转从而将锅具中的液体倒入液体容纳部中。
6.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,洗刷机构还包括抬升电机、竖直伸缩电机、旋转电机以及水平伸缩电机,抬升电机驱动抬升组件进行抬升,竖直伸缩电机驱动竖直伸缩组件进行伸缩,所述旋转电机驱动所述竖直伸缩组件旋转,水平伸缩电机驱动水平伸缩组件进行伸缩。
7.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,洗刷机构还包括水泵、泡沫发生器以及气泵,水平伸缩组件上设置有沿水平伸缩组件的长度方向分布的喷射孔,竖直伸缩组件靠近水平伸缩组件的一端分布有喷射孔,水泵、泡
沫发生器以及气泵分别将水、清洁剂以及干燥气通过导管导至喷射孔喷出。
8.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,洗刷机构还包括水位传感器,用于感应锅具中的液体的液位,水泵根据水位传感器的感应结果进行泵水。
9.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,翻转机构包括底座、连杆机构以及夹头,底座上设置有弹簧,连杆机构设置在底座上方并与底座相连接,多个夹头设置在连杆机构的端部,弹簧被锅具的重力压缩使得连杆机构驱动夹头夹紧锅具。
10.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,翻转机构还包括底座传感器,夹头为电磁夹头,底座传感器控制锅具下降到最低点时对电磁夹头进行通电。
11.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,翻转机构还包括电动推杆,底座靠近液体容纳部的一端与机架相铰接且设置有沿水平方向延伸的旋转轴,电动推杆推动底座使得底座绕旋转轴旋转,旋转角度为120
°
。
12.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,液体容纳部包括漏斗通道以及过滤部,过滤部设置在漏斗通道中,过滤部可从机架中抽出,液体容纳部还与排水管相连通。
13.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,侧壁刷头远离水平伸缩组件的一面为半圆弧面,底面刷头远离水平伸缩组件的一面为平面。
14.本实用新型提供的智能全自动清洗排污一体式刷锅机,还可以具有这样的特征,其中,排水机构还包括挡板,挡板设置在液体容纳部的顶面的边缘且竖直向上延伸。
15.实用新型作用与效果
16.根据本实用新型的智能全自动清洗排污一体式刷锅机,用于对锅具进行清洗,包括机架、翻转机构、洗刷机构以及排水机构,其中,翻转机构与机架相铰接,用于固定锅具;洗刷机构包括第一传感器、第二传感器、抬升组件、竖直伸缩组件、水平伸缩组件以及安装在水平伸缩组件上的侧壁刷头以及底面刷头,洗刷机构能够根据感应器的感应结果通过刷头自动对锅具进行横向以及纵向的洗刷,排水机构则包括翻转传感器以及液体容纳部,翻转机构能够根据抬升组件的抬升状态带动锅具进行翻转,从而自动将锅具中的液体倒入液体容纳部中。本实用新型的智能全自动清洗排污一体式刷锅机结构简单,能够根据感应器的感应结果对不同尺寸的锅具进行自动清洗,无需人工进行清洗操作,清洁效率高,且同时具有排污能力,特别适用于餐厅等需要对大量不同尺寸的锅具进行清洗的场所。
附图说明
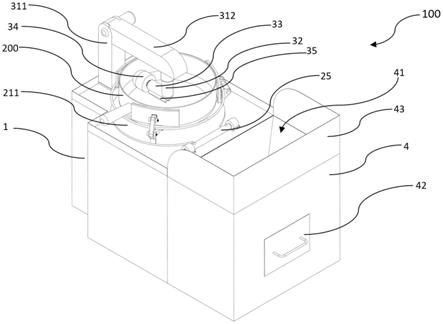
17.图1是本实用新型实施例的智能全自动清洗排污式一体机的立体结构示意图;
18.图2是本实用新型实施例的智能全自动清洗排污式一体机使用状态的立体结构示意图;
19.图3是本实用新型实施例的智能全自动清洗排污式一体机使用状态的主视结构示意图;
20.图4是本实用新型实施例的智能全自动清洗排污式一体机使用状态的俯视结构示意图;
21.图5是图4的a
‑
a处的剖视结构示意图;
22.图6是图5的c处的局部放大图;
23.图7是本实用新型实施例的智能全自动清洗排污式一体机的排水状态立体结构示意图a;
24.图8是本实用新型实施例的智能全自动清洗排污式一体机的排水状态立体结构示意图b;
25.图9是本实用新型实施例的智能全自动清洗排污式一体机的排水状态俯视结构示意图;
26.图10是本实用新型的图9的b
‑
b处剖视结构示意图。
具体实施方式
27.以下结合附图以及实施例来说明本实用新型的具体实施方式。
28.<实施例>
29.本实施例提供一种智能全自动清洗排污一体式刷锅机,用于对锅具进行清洗。
30.图1是本实用新型实施例的智能全自动清洗排污式一体机的立体结构示意图。
31.如图1所示,智能全自动清洗排污式一体机100包括机架1、翻转机构2、洗刷机构3、排水机构4以及控制器(未在图中显示)。
32.机架1呈柜体状,具有中空容纳腔。
33.图2是本实用新型实施例的智能全自动清洗排污式一体机使用状态的立体结构示意图,图3是本实用新型实施例的智能全自动清洗排污式一体机使用状态的主视结构示意图,图4是本实用新型实施例的智能全自动清洗排污式一体机使用状态的俯视结构示意图,图5是图4的a
‑
a处的剖视结构示意图,图6是图5的c处的局部放大图。
34.如图1~图6所示,翻转机构2安装在机架1上,用于固定锅具 200,包括底座21、连杆组件22、夹头23、电动推杆24、旋转组件 25以及底座传感器(未在图中显示)。
35.底座21包括翻转盘211、承托件212以及弹簧213。
36.翻转盘211呈圆盘状,其中心设置有穿过机架1顶面的通孔向机架1内部延伸的呈管状的弹簧承托部214,弹簧承托部214的底面密封。
37.旋转组件25包括两个轴承座251以及旋转轴252。
38.轴承座251固定在机架1上,位于翻转盘211的一侧,两个轴承座251中连接有旋转轴252,旋转轴252与翻转盘211固定连接,翻转盘211能够以旋转轴252为轴进行旋转。
39.承托件212包括承托部215以及弹簧容纳部216。
40.承托部215呈圆盘状,设置在翻转盘211的上方且面积小于翻转盘211。
41.弹簧容纳部216呈管状,设置在承托部215靠近翻转盘211的一侧并穿过弹簧承托部214。
42.弹簧213穿设在弹簧容纳部216中且底面与弹簧承托部214的底面相贴合。
43.本实施例中,翻转机构2包括三个连杆组件22,以承托件212 为圆心对称分布在翻转盘211上方。
44.连杆组件22包括第一连杆221、第二连杆222以及第三连杆223。
45.第一连杆221呈杆状,其一端与承托件212的承托部215的边缘转动连接。
46.第二连杆222呈l形,包括第一部分224以及第二部分225。
47.第一部分224呈杆状且略向上弯曲,其一端与第一连杆221远离承托部215的一端转动连接。
48.第二部分225设置在第一部分224远离第一连杆221的一端且向上延伸。
49.第三连杆223与第一部分224以及第二部分225之间的弯折部 226转动连接,且第三连杆223远离弯折部226的一端竖直向下延伸并与翻转盘211的边缘的顶面固定连接。
50.三个夹头23分别与三个第二连杆222的第二部分225远离第一部分224的一端固定连接,其远离第一部分224的一面为圆柱面的一部分,三个夹头23可对锅具200进行固定。
51.当锅具200放至承托部215上时,弹簧213因为锅具200的重力而被压缩,使得承托件212下降,从而使得与承托部215相连接的第一连杆221远离承托部215的一端向上移动,第二连杆222以弯折部 226为轴转动,使得第二部分225远离第一部分224的一端向靠近锅具200的外壁方向移动,从而使得夹头23与锅具200的外壁相紧贴,进而使三个夹头23相配合对锅具200进行加紧。
52.本实施例中,夹头23为电磁夹头,与电源相连通,在通电后即具有磁性。
53.底座传感器为光电传感器,固定在承托件212内部,用于感应承托件212是否仍下降,即在锅具200放置承托件212上后,承托件 212是否下降至最低点。当底座传感器感应到承托件212,即锅具200 下降至最低点时,控制器就控制电磁夹头进行通电,使得夹头进一步吸附锅具200进行固定。
54.图7是本实用新型实施例的智能全自动清洗排污式一体机的排水状态立体结构示意图a,图8是本实用新型实施例的智能全自动清洗排污式一体机的排水状态立体结构示意图b,图9是本实用新型实施例的智能全自动清洗排污式一体机的排水状态俯视结构示意图,图 10是本实用新型的图9的b
‑
b处剖视结构示意图。
55.电动推杆24由驱动件驱动,设置在翻转盘211的底面,位于弹簧承托部214的一侧,其靠近弹簧承托部214的一端与机架1转动连接,另一端与翻转盘211的底部转动连接,电动推杆24可伸缩。
56.驱动件驱动电动推杆24伸缩,以与机架1连接的一端为轴转动,另一端即向上移动且伸长,推翻转盘211使得整个底座21以及固定在底座21的部件以旋转组件25为旋转轴进行转动,本实施例的旋转角为120
°
,使得锅具200中的液体能够全部倒出。
57.洗刷机构3安装在机架1上,包括抬升组件31、竖直伸缩组件 32、水平伸缩组件33、侧壁刷头34、底面刷头35、第一传感器36、第二传感器37、气液输送组件(未在图中显示)以及液位传感器38。
58.本实施例中,抬升组件31包括固定件311以及旋转件312。
59.固定件311呈柱状,固定在机架1的顶面,位于底座21远离旋转组件25的一侧,固定件311的高度大于夹头23的最高点。
60.旋转件312与电机连接,呈柱状,与固定件311远离机架1的一端转动连接,可以绕该端在排水状态以及清洗状态之间旋转。
61.当旋转件312处于排水状态时,旋转件312沿竖直方向延伸,当旋转件312处于清洗
状态时,旋转件312沿水平方向延伸,即旋转角度为90
°
。
62.竖直伸缩组件32与竖直伸缩电机以及旋转电机相连接,与旋转件312远离固定件311的一端固定连接,可沿垂直于旋转件312的方向伸缩,即当旋转件312处于清洗状态时,竖直伸缩组件32可沿竖直方向伸缩且可旋转。
63.水平伸缩组件33与水平伸缩电机相连接,与竖直伸缩组件32远离旋转件312的一端固定连接且垂直于竖直伸缩组件32的伸缩方向,可沿平行于旋转件312的方向伸缩,即当旋转件312处于清洗状态时,水平伸缩组件32可沿水平方向伸缩。
64.竖直伸缩组件32旋转时带动水平伸缩组件33以竖直伸缩组件 32为轴进行旋转。
65.本实施例中,水平伸缩组件33为三段式伸缩组件。
66.侧壁刷头34为海绵刷头,固定在水平伸缩组件33远离竖直伸缩组件32的一端,侧壁刷头34远离水平伸缩组件33的一端呈半圆球状,可以对锅具200的侧壁进行洗刷。
67.底面刷头35为海绵刷头,固定在水平伸缩组件33远离旋转件 312的一面,底面刷头35远离旋转件312的一面呈平面状,可以对锅具200的底面进行洗刷。
68.竖直伸缩组件32靠近水平伸缩组件33的一端分布有朝向外侧的喷射孔321,水平伸缩组件33沿长度方向分布有朝向外侧的喷射孔 331。
69.第一传感器36为压力传感器,固定在水平伸缩组件33靠近侧壁刷头34的一端,即设置在侧壁刷头34内,用于感应侧壁刷头34受到的压力,即可在清洗锅具200时结合水平伸缩组件33的伸出量判断锅具200的直径。
70.第二传感器37为压力传感器,固定在水平伸缩组件33靠近底面刷头35的位置处,用于感应底面刷头35受到的压力,即可在清洗锅具200时结合竖直伸缩组件32的伸出量判断锅具200的深度。
71.控制器根据第一传感器36的感应结果控制竖直伸缩电机以及旋转电机分别驱动竖直伸缩组件32进行伸缩以及旋转,控制器根据第二传感器37的感应结果控制水平伸缩电机驱动水平伸缩组件33进行伸缩,从而对锅具进行洗刷。
72.气液输送组件包括水泵、泡沫发生器以及气泵,均安装在机架1 内。
73.抬升组件31、竖直伸缩组件32以及水平伸缩组件33中均设置有分别与水泵、泡沫发生器以及气泵相连接的导管,并延伸至竖直伸缩组件32以及水平伸缩组件33上的喷射孔321以及喷射孔331。
74.水泵、泡沫发生器以及气泵分别将清水、泡沫洗洁剂以及干燥气通过导管导至喷射孔321以及喷射孔331射出。
75.液位传感器38安装在旋转件312的端部,当旋转件312旋转至清洗状态时,液位传感器38感应锅具200中液体的深度,控制器根据液位传感器38的感应结果,即当液位传感器38感应到锅具200中液体的液位与锅具200的深度相匹配时,控制水泵停止泵水。
76.排水机构4包括液体容纳部41、过滤部42、挡板43以及翻转传感器(未在图中显示)。
77.液体容纳部41安装在机架1上的旋转组件25远离底座21的一端,液体容纳部41中包括相连通的第一漏斗通道411以及第二漏斗通道412。
78.第一漏斗通道411以及第二漏斗通道412之间设置有过滤部42,过滤部42可从机架1中抽出,过滤部42具有过滤网421。
79.第二漏斗通道412与排水管44相连通。
80.挡板43设置在液体容纳部41的顶端,位于除了靠近旋转组件25的一边的三个边缘处且竖直向上延伸。
81.翻转传感器设置在旋转件312处,用于感应旋转件312是否旋转至排水状态,即抬升组件31是否抬升,控制器根据翻转传感器的感应结果,即当旋转件312旋转至排水状态时,在控制电动推杆24将翻转机构2进行翻转。
82.本实施例的智能全自动清洗排污一体式刷锅机的工作过程如下:
83.将锅具200放置到承托件212上,连杆组件22以及夹头23自动对锅具200进行固定,且电磁夹头23根据底座感应器感应到承托件下降至最低点后进行通电从而吸附锅具200;洗刷机构3的旋转件312 由排水状态旋转至洗刷状态,水泵进行泵水并通过导管使得清水从喷射孔321以及喷射孔331中喷入锅具200中,竖直伸缩组件32以及水平伸缩组件33再根据第一传感器36以及第二传感器37的感应结果,即锅具200的深度以及直径伸缩以及旋转从而进行洗刷,在进行预订次数的往复运动后,抬升组件31的旋转件312由清洗状态旋转至排水状态,电动推杆24将底座21翻转120
°
,使得锅具200中的水倒入液体容纳部41中;将水泵工作依次切换为泡沫发生器以及水泵工作,重复上述清洗步骤;再将水泵工作切换为气泵步骤,完成对锅具200的干燥,各个部分恢复初始状态,即完成清洗工作过程。
84.实施例作用与效果
85.本实施例提供了一种智能全自动清洗排污一体式刷锅机,用于对锅具进行清洗,包括机架、翻转机构、洗刷机构以及排水机构,其中,翻转机构与机架相铰接,用于固定锅具;洗刷机构包括第一传感器、第二传感器、抬升组件、竖直伸缩组件、水平伸缩组件以及安装在水平伸缩组件上的侧壁刷头以及底面刷头,洗刷机构能够根据感应器的感应结果通过刷头自动对锅具进行横向以及纵向的洗刷,排水机构则包括翻转传感器以及液体容纳部,翻转机构能够根据抬升组件的抬升状态带动锅具进行翻转,从而自动将锅具中的液体倒入液体容纳部中。本实施例的智能全自动清洗排污一体式刷锅机结构简单,能够根据感应器的感应结果对不同尺寸的锅具进行自动清洗,无需人工进行清洗操作,清洁效率高,且同时具有排污能力,特别适用于餐厅等需要对大量不同尺寸的锅具进行清洗的场所。
86.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的洗刷机构包括抬升电机、竖直伸缩电机、旋转电机以及水平伸缩电机,能够与控制器相连接,自动完成对洗刷机构中抬升组件、竖直伸缩组件以及水平伸缩组件的驱动控制,进一步实现自动化。
87.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的洗刷机构还包括水泵、泡沫发生器以及气泵,且水平伸缩组件以及竖直伸缩组件上分布有喷射孔,水泵、泡沫发生器以及气泵能够分别将水、清洁剂以及干燥气通过导管导至喷射孔喷出,即用户不需要手动加水以及清洁剂,且还可以对锅具实现自动烘干,进一步实现清洗自动化。
88.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的洗刷机构还包括水位传感器,能够感应锅具中液体的液位,水泵能够根据水位传感器的感应结果进行泵水,即可以在系统预定的刷洗水位停止泵水,既能够合理进行清洗,也不会浪费水资源。
89.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的翻转机构还包括底座传感器,且夹头为电磁夹头,电磁夹头能够在翻转机构固定好锅具后进一步通电吸附锅具,能够使得固定更为稳固。
90.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的液体容纳部包括漏斗通道以及过滤部,漏斗通道能够首先使得较大的残留物被过滤,从而不会造成水管的堵塞,过滤部设置有滤网,能够过滤较小的杂质,且过滤部能够被抽出,使得用户能够方便地将杂质及时清理,避免堵塞管道。
91.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的侧壁刷头的端面呈半圆弧面,与锅具圆柱状态的内壁进行洗刷,底面刷头的清洁面则呈平面,能够对锅具的底面进行洗刷。
92.进一步,本实施例提供的智能全自动清洗排污一体式刷锅机的排水机构包括挡板,设置在液体容纳部的顶面的边缘,能够防止锅具进行排水时液体溅出造成污染。
93.上述实施例仅用于举例说明本实用新型的具体实施方式,而本实用新型不限于上述实施例的描述范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1