一种集装箱自主清洗、消毒的机器人的制作方法
1.本实用新型涉及消防机器人技术领域,具体为一种集装箱自主清洗、消毒的机器人。
背景技术:
2.在货物运输行业,集装箱是被广泛用于装载包装或无包装货进行运输,并便于用机械设备进行装卸搬运的一种成组工具,其具有产品的标准化程度高、运输体系完善等优点。集装箱的有效使用能够让一个载重几十吨的庞然大物实现标准化,并且以此为基础逐步实现全球范围内的船舶、港口、航线、公路、中转站、桥梁、隧道、多式联运相配套的物流系统,体现了设计人员的智慧。
3.集装箱的大量使用,对其的清洗、消毒工作也产生了大量的需求。现有的集装箱清洗、消毒工作主要是由工人拿着水枪对集装箱进行清洗和消毒,效率较低,尤其在特殊时期,集装箱内可能会携带病毒,这样便对进入集装箱内部进行清洗消毒工作的工人造成严重的感染风险。
4.因此,研发一种集装箱清洗、消毒的机器人设备,连续实现对集装箱进行无人员接触式清洗消毒,降低病毒的感染风险,提高工作效率,满足日益增长的运输贸易需求,成为迫切的需求。
技术实现要素:
5.本实用新型的目的在于提供一种集装箱自主清洗、消毒的机器人,以解决上述背景技术中提出的问题。
6.一种集装箱自主清洗、消毒的机器人,其包括:
7.底盘及安装于底盘上的卷盘、水枪、下清洗装置;
8.所述卷盘搭载有水管;
9.水管的一端连接供水设备,另一端通过三通管路分别连接水枪、下清洗装置;
10.卷盘内设置有卷簧保持水管收放过程中始终缠绕收紧。
11.优选地,所述底盘上安装有旋转摄像仪。
12.进一步,底盘上安装有重载云台;所述重载云台与底盘之间设置有台座,重载云台通过转轴转动连接于台座上。
13.进一步,水枪、下清洗装置与三通管路的连接管路上分别设置有第一电磁阀、第二电磁阀,分别用于控制水枪、下清洗装置的通断。
14.进一步,水枪、第二电磁阀安装于重载云台上,水枪、第二电磁阀外部安装有护罩。
15.进一步,底盘上安装有履带式的行进机构。
16.进一步,底盘上安装有罩壳。
17.进一步,下清洗装置为钉耙形状结构,其设置有若干倾斜向下的喷枪。
18.与现有技术相比,本实用新型的有益效果是:
19.第一、本实用新型在消防机器人底盘上设计了搭载了水管的卷盘,水管一端连接三通管路,另一端与供水车连接,供水车的水箱内装载有水及消毒液。机器人行进过程中,卷盘转动带动水管收放,并保持水管实时收紧,可实现连续供水用于机器人进行清洗消毒。
20.第二、搭载了可旋转的重载云台,重载云台上搭载有水枪,可实现对集装箱实现全方位的清洗;清洗水枪端部可以加一个雾化喷头,可以实现清洗消毒两用。下冲洗装置可以同时实现对集装箱地面的清洗工作。同时,可以通过旋转摄像仪观察集装箱的重点区域,着重对重点区域进行清洗消毒工作。
附图说明
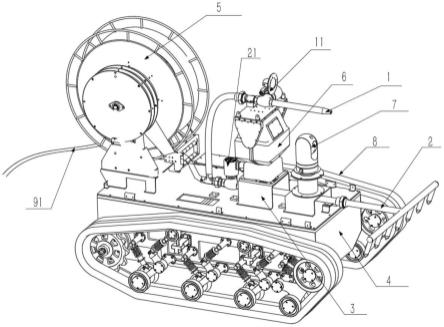
21.图1为本实用新型的集装箱自主清洗、消毒的机器人的结构示意图;
22.图2为图1的内部结构示意图;
23.图3为集装箱自主清洗、消毒的机器人与供水车连接结构示意图。
24.图中:
25.水枪1、第一电磁阀11、下清洗装置2、第二电磁阀21、台座3、底盘4、罩壳41、卷盘5、重载云台6、护罩61、旋转摄像仪7、行进机构8、供水车9、供水接头90、水管91。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1-3,一种集装箱自主清洗、消毒的机器人,其包括底盘4及安装于底盘4上的卷盘5、水枪1、下清洗装置2;所述卷盘5搭载有水管91;水管91的一端连接供水设备,另一端通过三通管路分别连接水枪1、下清洗装置2。水枪1端部可以加一个雾化喷头,可以实现清洗消毒两用。配合下清洗装置2可以同时实现对集装箱地面的清洗工作。
28.供水设备可以使用供水车9,供水车9内设置有装载水、消毒液的水箱,为机器人提供清洗水及消毒液来源。机器人行进过程中,卷盘转动带动水管收放,卷盘5内设置有卷簧保持水管91收放过程中始终缠绕收紧,可实现连续供水用于机器人进行清洗消毒。
29.在一个实施例中,底盘4上安装有旋转摄像仪7。可以通过旋转摄像仪7观察集装箱的重点区域,着重对重点区域进行清洗消毒工作。
30.底盘4上安装有重载云台6;所述重载云台6与底盘4之间设置有台座3,重载云台6通过转轴61转动连接于台座3上。水枪1、下清洗装置2与三通管路的连接管路上分别设置有第一电磁阀11、第二电磁阀21,分别用于控制水枪1、下清洗装置2的通断。水枪1、第二电磁阀21安装于重载云台6上,水枪1、第二电磁阀21外部安装有护罩。底盘4上安装有履带式的行进机构8。底盘4上安装有罩壳41。三通管路及水枪1、下清洗装置2的管路安装于罩壳41内。下清洗装置2为钉耙形状结构,其设置有若干倾斜向下的喷枪,倾斜角度可以进行调整,机器人在行进过程中,通过喷枪可以实现对地面的清洗。
31.实施例1:
32.本实施例中,卷盘5搭载的水管91末端由人工或机械设备牵引,与供水车9的供水
接口90连接,由供水车9对机器人供水或供消毒液。在机器人移动过程中,通过卷盘始终实现对水管的实时收紧。
33.加水过程中,机器人可不间断工作,由于卷盘搭载于机器人上,水管长度的调节完全由卷盘转动实现,避免了水管拖地产生摩擦带来的不良影响,可实现持续作业。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种集装箱自主清洗、消毒的机器人,其特征在于,其包括:底盘(4)及安装于底盘(4)上的卷盘(5)、水枪(1)、下清洗装置(2);所述卷盘(5)搭载有水管(91);水管(91)的一端连接供水设备,另一端通过三通管路分别连接水枪(1)、下清洗装置(2);卷盘(5)内设置有卷簧保持水管(91)收放过程中始终缠绕收紧。2.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于:所述底盘(4)上安装有旋转摄像仪(7)。3.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于底盘(4)上安装有重载云台(6);所述重载云台(6)与底盘(4)之间设置有台座(3),重载云台(6)通过转轴(61)转动连接于台座(3)上。4.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于:水枪(1)、下清洗装置(2)与三通管路的连接管路上分别设置有第一电磁阀(11)、第二电磁阀(21),分别用于控制水枪(1)、下清洗装置(2)的通断。5.根据权利要求4所述的一种集装箱自主清洗、消毒的机器人,其特征在于:水枪(1)、第二电磁阀(21)安装于重载云台(6)上,水枪(1)、第二电磁阀(21)外部安装有护罩。6.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于:底盘(4)上安装有履带式的行进机构(8)。7.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于:所述底盘(4)上安装有罩壳(41)。8.根据权利要求1所述的一种集装箱自主清洗、消毒的机器人,其特征在于:下清洗装置(2)为钉耙形状结构,其设置有若干倾斜向下的喷枪。
技术总结
本实用新型涉及消防机器人技术领域,提供一种集装箱自主清洗、消毒的机器人,其包括底盘及安装于底盘上的卷盘、水枪、下清洗装置;所述卷盘搭载有水管;水管的一端连接供水设备,另一端通过三通管路分别连接水枪、下清洗装置;卷盘内设置有卷簧保持水管收放过程中始终缠绕收紧。本实用新型在消防机器人底盘上设计了搭载了水管的卷盘,机器人行进过程中,卷盘转动带动水管收放,并保持水管实时收紧,可实现连续供水用于机器人进行清洗消毒。搭载了可旋转的重载云台,重载云台上搭载有水枪,可实现对集装箱实现全方位的清洗;清洗水枪端部可以加一个雾化喷头,可以实现清洗消毒两用。下冲洗装置可以同时实现对集装箱地面的清洗工作。作。作。
技术研发人员:于守水 王红宾 杨宗军 张京龙 尹彬 宋晓宁 张兴起 吕建龙 韩文轩 王文杰
受保护的技术使用者:青岛港国际股份有限公司
技术研发日:2021.10.14
技术公布日:2023/2/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1