用于管道的清扫装置的制作方法
1.本实用新型属于清洁装置技术领域,具体涉及一种用于管道的清扫装置。
背景技术:
2.密布在大型商场、地铁、楼宇等大量通风、空调管道,经过长时间使用,聚集了大量的细菌、尘土、纤维等物,长期下来会对室内人员造成严重的身体危害。
3.可以利用人工进行清扫,但需要对管道进行拆卸。从而,人工清扫的方式不仅效率低,而且会造成污染,损害清扫人员的身体健康。
4.随着经济的发展和科技的进步,管道清扫机器人作为一种特殊的服务性移动机器人已进入人们的视线,得到了越来越多的重视和应用。但是,目前的管道清扫机器人在一些方面还需要进步。例如,清洁能力有限。
技术实现要素:
5.针对现有技术中所存在的上述技术问题的部分或者全部,本实用新型提出了一种用于管道的清扫装置。该用于管道的清扫装置不仅能对管道进行清扫操作,还增加了喷淋组件,例如可以进行消毒杀菌操作,从而提高了清洁能力,进而进一步地保证了用户的身体健康。
6.根据本实用新型,提供了一种用于管道的清扫装置,包括:
7.车体,
8.设置在所述车体的底端的走行组件,
9.设置在所述车体的前端的用于进行清扫的清扫组件,
10.设置在所述车体上的用于向外喷洒介质的喷淋组件。
11.在一个实施例中,所述喷淋组件包括:
12.固定在所述车体上的容器,
13.引流管,所述引流管的一端与所述容器连通式设置,
14.喷头,所述喷头设置在所述引流管的另一端,
15.水泵,所述水泵设置在所述容器内以用于向引流管内泵送介质。
16.在一个实施例中,所述喷头为多个,并在周向上均匀分布,在各所述喷头与所述引流管之间设置分支管。
17.在一个实施例中,所述走行组件包括:
18.横向延伸的支撑轴,所述支撑轴与所述车体旋转式连接,
19.设置在所述支撑轴的两端的走行轮,
20.其中,所述支撑轴构造为伸缩杆状。
21.在一个实施例中,所述支撑轴通过电动缸促动用于进行伸长或者收缩。
22.在一个实施例中,所述走行轮构造为履带式。
23.在一个实施例中,所述清扫组件包括:
24.设置在所述车体上的安装座,
25.端部设置在所述安装座上的支撑臂,
26.设置在所述支撑臂的顶部的清扫刷。
27.在一个实施例中,在所述安装座上设置有摄像机。
28.在一个实施例中,所述支撑臂的端部铰接到所述安装座上,并在所述支撑臂与所述安装座之间设置有升降缸。
29.在一个实施例中,所述清扫刷通过电机进行驱动用于相对于所述支撑臂进行旋转。
30.与现有技术相比,本实用新型的优点在于:该用于管道的清扫装置不仅能对管道进行清扫操作,还增加了喷淋组件,例如可以进行消毒杀菌操作,从而提高了清洁能力,进而进一步地保证了用户的身体健康。
附图说明
31.下面将结合附图来对本实用新型的优选实施例进行详细地描述,在图中:
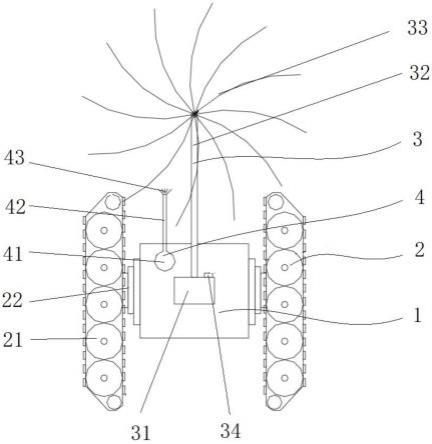
32.图1显示了根据本实用新型的一个实施例的用于管道的清扫装置。
33.附图并未按照实际的比例绘制。
具体实施方式
34.为了使本实用新型的技术方案及优点更加清楚明白,以下结合附图对本实用新型的示例性实施例进行进一步详细的说明。显然,所描述的实施例仅是本实用新型的一部分实施例,而不是所有实施例的穷举。并且在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以互相结合。
35.本实用新型的实施例提出了一种用于管道的清扫装置。如图1所示,用于管道的清扫装置包括车体1、走行组件2、清扫组件3和喷淋组件4。其中,车体1可以构造为大体的方形结构,主要起到基础支撑和主体的作用。走行组件2设置在车体1的底端,主要用带动车体1进行行走,从而完成整个管道的清扫工作。清扫组件3设置在车体1的前端,主要用于在车体1进行走行过程中,对管道进行清扫。喷淋组件4设置在车体1上,用于向外喷洒介质,该介质可以为消毒或者杀菌液体,例如,84消毒水等,用于进行消杀工作。
36.该用于管道的清扫装置不仅能对管道进行清扫操作,还增加了喷淋组件4,例如可以进行消毒杀菌操作,从而提高了清洁能力,进而进一步地保证了用户的身体健康。
37.在一个实施例中,喷淋组件4包括容器41、引流管42、喷头43和水泵(图中未示出)。其中,容器41固定在车体1上,主要用于储存和携带例如消毒水等介质。引流管42的一端与容器41连通式设置,主要起到用于运送介质的作用。喷头43设置在引流管42的另一端,主要用于将介质以比较高的压力喷洒出去,并保证介质的喷洒均匀性。水泵设置在容器41内,以用于向引流管42内泵送介质,以在需要时向外喷洒介质。在用于管道的清扫装置进入管道前,先在容器41内灌装消毒液。在用于管道的清扫装置进入管道,并清扫过程中,可以打开喷头43并控制水泵,使得消毒液通过喷头43向管道内进行喷洒,从而完成消杀工作。
38.在一个优选的实施例中,喷头43为多个,例如4个,并在周向上均匀分布,在各喷头43与引流管42之间设置分支管(图中未示出)。通过设置多个喷头43,可以增加喷洒面积,尤
其,车体1在走行过程中,一次通过可以保证整个管道截面均被消杀。
39.在一个实施例中,走行组件2包括支撑轴21和走行轮22。其中,支撑轴21为横向延伸,并且支撑轴21与车体1旋转式连接。在各支撑轴21的两端设置有走行轮22。在清扫过程中,支撑轴21在驱动电机的驱动下相对于车体1进行旋转,进而带动走行轮22进行旋转,从而带动车体1进行移动。优选地,该支撑轴21可以构造为伸缩杆状。在支撑轴21进行伸长过程中,带动两端的走行轮22之间的距离加大,使得该用于管道的清扫装置的横向变宽,可以适用于通流截面更大的管道。相反地,而在支撑轴21进行缩短过程中,带动两端的走行轮22之间的距离减小,使得该用于管道的清扫装置的横向变窄,可以适用于通流面积更小的管道。从而,通过上述设置,可以调整用于管道的清扫装置的适用范围。
40.走行轮22构造为履带式。履带式地走行组件2可以保证运行地平稳性,尤其具有很强的摩擦力,由此,可以使得该用于管道的清扫装置不仅适用于水平延伸的管道,还适用于爬坡的管道等。需要说明的是,图1所示的走行轮22不是其工作位置,在实际工作状态下,走行轮22的旋转轴与支撑轴21的轴向平行。
41.清扫组件3包括安装座31、支撑臂32和清扫刷33。其中,安装座31设置在车体1的顶端面上,主要起到设置支撑臂32的作用。支撑臂32的端部设置在安装座31上,主要用于起到支撑清扫刷33的作用。清扫刷33设置在支撑臂32的顶部,主要用于进行清扫操作。
42.在一个实施例中,在安装座31上设置有摄像机34。该摄像机34主要用来进行视觉导航,用于对管道内部环境进行全方位的检测,随着车体1清扫的移动,该摄像机34不断地拍摄周边环境,进行实时定位,识别已经清扫地区域并进行避障,最终实现智能清扫。
43.支撑臂32的端部铰接到安装座31上。并在支撑臂32与安装座31之间设置有升降缸(图中未示出)。也就是说,该支撑臂32可以相对于安装座31进行旋转,从而调节清扫刷33的高度。具体地,在升降缸伸长过程中,促动支撑臂32的顶部相对升高,进而带动清扫刷33升高。相反地,在升降缸缩短过程中,促动支撑臂32的顶部相对减低,进而带动清扫刷33降低。通过这种设置可以使得该用于管道的清扫装置适应于不同管道的高度,提高该用于管道的清扫装置的适用范围。
44.清扫刷33通过电机进行驱动用于相对于支撑臂32进行旋转。在清扫过程中,该清扫刷33可以进行旋转,从而提高清扫效果,保证清扫洁净。需要说明的是,该清扫刷33的旋转轴的方向可以根据不同的需要进行设置,例如,清扫刷33的旋转轴可以为竖向(与车体1到走行组件2的方向一致)延伸。
45.根据本技术的用于管道的清扫装置,不仅可以实现对空调管道中的污秽进行有效的清理,还能进行消杀工作,从而保障空调用户更加卫生安全。
46.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。因此,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和/或修改,根据本实用新型的实施例作出的变更和/或修改都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1