一种用于飞机的非接触柔性清洗系统的制作方法
1.本发明涉及飞机非接触柔性清洗系统领域,具体涉及一种用于飞机的非接触柔性清洗系统。
背景技术:
2.飞机外表面由于受到来自大气、地面、燃料废气等方面的污染,外表面及部件上会沉积烟雾、灰尘、油污、积碳、氧化物和橡胶等污染物,这些污物如果不清洗,不仅会影响到飞机的外观,往往还会成为腐蚀飞机的诱因,因此需要对飞机的外表面进行清洗;
3.为防止飞机表面漆层受到腐蚀避免安全事故,飞机清洗剂一般需要获得民航总局航空化学产品设计/生产批准,并通过民航总局测试中心的严格检测,飞机清洗剂一般为碱性水基表面清洗剂,这类清洗剂性能优良,对飞机表面漆层和玻璃无腐蚀,并且能够兑水稀释1-30倍,性能高效环保、经济安全,清洗方式也较为简单,采用高压喷枪喷洗后再使用清洗工具进行擦洗;
4.由于飞机机体较大清洗难度比较高,通常都要安排数人同时进行作业,既耗时又耗力,且有些地方很难清洗作业,国内目前大多数还是人工清洗;
5.由于客机的高度太高,飞机表面对精度要求比较高,很多地方严禁攀爬和用硬物刮擦,通常需要用工程车搭载进行高空作业,局部区域采用高压喷枪进行清理。
技术实现要素:
6.本发明要解决的技术问题是由于飞机机体较大清洗难度比较高,通常都要安排数人同时进行作业,既耗时又耗力,且有些地方很难清洗作业,国内目前大多数还是人工清洗,本发明提供一种用于飞机的非接触柔性清洗系统,能够解决传统飞机清洗技术中人工擦洗耗时耗力和高压冲洗具有损伤风险的维护难题,形成成套微纳米气泡无人化整机深度清洗系统的快速转化,实现无人化整机快速淋洗,尤其适用飞机临近海面低空飞行返航后及时的盐雾清除,有效缓解飞机腐蚀问题,大大提升战时飞机出勤率和战力,延长飞机寿命,用以解决现有技术导致的缺陷。
7.为解决上述技术问题本发明提供以下的技术方案:
8.一种用于飞机的非接触柔性清洗系统,其中,包含供飞机移动的清洗平台、清洗飞机机背的机背清洗组件、清洗飞机机腹的机腹清洗组件、总控组件、雷达传感器,所述机背清洗组件包含第一储液罐以及分别与所述第一储液罐连接的溶气式空化机组、空化炮,所述机腹清洗组件包含依次连接的第二储液罐、微纳米空化机组、空化喷头组件,所述空化喷头组件安装于所述清洗平台的底部,所述清洗平台上开设有匹配所述空化喷头组件的第一通孔,所述清洗平台的两侧等距安装有多个所述雷达传感器;
9.所述雷达传感器通过无线连接于所述总控组件进行数据交互,所述总控组件分别控制连接所述溶气式空化机组、所述空化炮、所述微纳米空化机组、所述空化喷头组件。
10.上述的一种用于飞机的非接触柔性清洗系统,其中,所述总控组件包含操作触屏、
pci控制器、低电压控制柜、高电压控制柜、主电柜,所述操作触屏控制连接所述pci控制器,所述pci控制器分别控制连接所述低电压控制柜、所述高电压控制柜、所述主电柜、所述空化喷头组件,所述低电压控制柜、所述高电压控制柜、所述主电柜分别与所述溶气式空化机组、所述空化炮、所述微纳米空化机组连接。
11.上述的一种用于飞机的非接触柔性清洗系统,其中,所述空化喷头组件包含安装于所述清洗平台底部的多个空化喷头组,所述微纳米空化机组通过第一管路连接任一个所述空化喷头组,所述空化喷头组之间通过第二管路连接,所述pci控制器分别控制连接每个所述空化喷头组。
12.上述的一种用于飞机的非接触柔性清洗系统,其中,所述第一储液罐、所述第二储液罐的内部均设有液位传感器与微纳米循环发生器,所述液位传感器通过无线连接于所述pci控制器进行数据传输,所述pci控制器通过无线控制连接所述微纳米循环发生器。
13.上述的一种用于飞机的非接触柔性清洗系统,其中,所述溶气式空化机组包含依次连接的第一超声发生器、第一超声回旋器、第一气液混合箱、气液混合泵、第一微纳米气泡混合罐以及与所述气液混合箱连接的第一活性氧离子发生器、与所述气液混合泵连接的气源箱;
14.所述第一超声发生器通过第一过滤器连接于所述第一储液罐;
15.所述第一微纳米气泡混合罐连接于所述第一储液罐;
16.所述空化炮通过高压水泵连接于所述第一储液罐,所述空化炮为摇摆空化炮;
17.所述第一活性氧离子发生器与所述第一气液混合箱之间连接有第一纳米气泡控制器;
18.所述pci控制器分别控制连接所述第一超声发生器、所述第一超声回旋器、所述气液混合泵、所述第一活性氧离子发生器、所述高压水泵、所述第一纳米气泡控制器。
19.上述的一种用于飞机的非接触柔性清洗系统,其中,所述第一超声回旋器与所述第一气液混合箱之间依次连接有流量计、第一节流阀,所述气源箱通过第一单向阀连接于所述气液混合泵,所述第一微纳米气泡混合罐上连接有第一排气电磁阀,所述第一排气电磁阀与所述第一微纳米气泡混合罐之间安装有压力表;
20.所述流量计、所述压力表通过无线与所述pci控制器连接实现数据交互;
21.所述pci控制器分别控制连接所述第一节流阀、所述第一排气电磁阀。
22.所述第一储液罐中的水通过所述第一过滤器进入所述第一超声发生器中,对流经的水进行超声共振,使流动的普通水转换成含有纳米气泡的水质,所述第一超声发生器采用双面对穿式振头;随后进入所述第一超声回旋器中,所述第一超声回旋器是使初级的纳米气泡水在高速流动下产生滚动的回旋涡流,保证纳米气泡在水中存留的时间更长久;随后进入所述第一气液混合箱进行存储,所述第一活性氧离子发生器对所述第一气液混合箱内的水进行气体净化、并增加活性氧离子的生成,当活性氧离子与水分子进行混合时,释放大量活性氧因子,深入微小缝隙,轻松去除难以去除的污渍;通过所述气液混合泵将所述第一气液混合箱内的水抽入所述第一微纳米气泡混合罐的同时,将含有活性氧的气体经过所述第一单向阀输入所述第一微纳米气泡混合罐,混合后输送至所述第一储水罐中,所述高压水泵将水从所述第一储水罐中取出输送至所述空化炮进行对飞机机背的清洗。
23.上述的一种用于飞机的非接触柔性清洗系统,其中,所述微纳米空化机组包含依
次连接的第二超声发生器、第二超声回旋器、第二气液混合箱、高速旋切泵、第二微纳米气液混合罐以及与所述高速旋切泵的输入端连接的第二活性氧离子发生器;
24.所述第二超声发生器通过第二过滤器与所述第二储液罐连接;
25.所述第二微纳米气液混合罐连接于所述第一管路;
26.所述第二活性氧离子发生器与所述第二气液混合箱之间连接有第二纳米气泡控制器;
27.所述pci控制器分别控制连接所述第二超声发生器、所述第二超声回旋器、所述高速旋切泵、所述第二活性氧离子发生器、所述第二纳米气泡控制器。
28.上述的一种用于飞机的非接触柔性清洗系统,其中,所述第二超声回旋器与所述第二气液混合箱之间连接有第二单向阀,所述高速旋切泵与所述第二微纳米气液混合罐之间连接有第二节流阀,所述第一微纳米气泡混合罐上连接有第二排气电磁阀;
29.所述pci控制器分别控制连接所述第二节流阀、所述第二排气电磁阀。
30.所述第二储液罐中的水通过所述第二过滤器进入所述第二超声发生器中,对流经的水进行超声共振,使流动的普通水转换成含有纳米气泡的水质,所述第二超声发生器采用双面对穿式振头;随后进入所述第二超声回旋器中,所述第二超声回旋器是使初级的纳米气泡水在高速流动下产生滚动的回旋涡流,保证纳米气泡在水中存留的时间更长久;随后进入所述第二气液混合箱进行存储,所述第二活性氧离子发生器对所述第二气液混合箱内的水进行气体净化、并增加活性氧离子的生成,当活性氧离子与水分子进行混合时,释放大量活性氧因子,深入微小缝隙,轻松去除难以去除的污渍;通过所述高速旋切泵将所述第二气液混合箱内的水抽入所述第二微纳米气泡混合罐,随后通过所述空化喷头组进行输出对飞机机腹的清洗。
31.上述的一种用于飞机的非接触柔性清洗系统,其中,所述清洗平台的两侧均设有所述机背清洗组件。
32.上述的一种用于飞机的非接触柔性清洗系统,其中,所述清洗平台的顶部安装有地垫,所述地垫上开设有匹配所述第一通孔的第二通孔。
33.上述的一种用于飞机的非接触柔性清洗系统的原理是利用微纳米气泡清洗技术吸附、气液两相流扰动和空化作用,将污染物从飞机表面溶解、吸附、剥离,能够深入复杂结构带走污染物,具有高效、深度清洗的优势;
34.利用微纳米气泡作为清洗介质,分别针对机背和机腹的不同需求开发低压柔性、非接触式的整机清洗专用核心设备,能避免重要涂层损伤,具有更高安全性的优势;
35.基于雷达传感器感应进行视觉识别和智能调参等功能实现清洗全过程的自动化运行,可将整机清洗耗时从人工作业的3-6个小时缩短至10分钟以内,具有快速、无人化的优势。
36.依据上述本发明一种用于飞机的非接触柔性清洗系统提供的技术方案具有以下技术效果:
37.本系统可以解决传统飞机清洗技术中人工擦洗耗时耗力和高压冲洗具有损伤风险的维护难题,形成成套微纳米气泡无人化整机深度清洗系统的快速转化,实现无人化整机快速淋洗,尤其适用飞机临近海面低空飞行返航后及时的盐雾清除,有效缓解飞机腐蚀问题,大大提升战时飞机出勤率和战力,延长飞机寿命。
附图说明
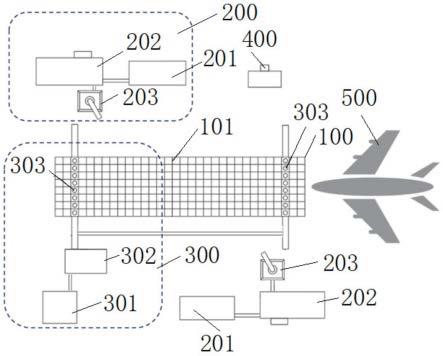
38.图1为本发明一种用于飞机的非接触柔性清洗系统的结构示意图;
39.图2为本发明一种用于飞机的非接触柔性清洗系统中溶气式空化机组的结构示意图;
40.图3为本发明一种用于飞机的非接触柔性清洗系统中微纳米空化机组的结构示意图。
41.其中,附图标记如下:
42.清洗平台100、机背清洗组件200、机腹清洗组件300、总控组件400、飞机500、地垫101、第一储液罐201、溶气式空化机组202、空化炮203、第一超声发生器204、第一超声回旋器205、第一气液混合箱206、气液混合泵207、第一微纳米气泡混合罐208、第一活性氧离子发生器209、气源箱210、第一过滤器211、高压水泵212、流量计213、第一节流阀214、第一单向阀215、第一排气电磁阀216、压力表217、第一纳米气泡控制器218、第二储液罐301、微纳米空化机组302、空化喷头组303、第二超声发生器304、第二超声回旋器305、第二气液混合箱306、高速旋切泵307、第二微纳米气液混合罐308、第二活性氧离子发生器309、第二过滤器310、第二纳米气泡控制器311、第二单向阀312、第二节流阀313、第二排气电磁阀314。
具体实施方式
43.为了使发明实现的技术手段、创造特征、达成目的和功效易于明白了解,下结合具体图示,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。
44.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
46.同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
47.本发明的一较佳实施例是提供一种用于飞机的非接触柔性清洗系统,目的是解决传统飞机清洗技术中人工擦洗耗时耗力和高压冲洗具有损伤风险的维护难题,形成成套微纳米气泡无人化整机深度清洗系统的快速转化,实现无人化整机快速淋洗,尤其适用飞机临近海面低空飞行返航后及时的盐雾清除,有效缓解飞机腐蚀问题,大大提升战时飞机出勤率和战力,延长飞机寿命。
48.如图1所示,一种用于飞机的非接触柔性清洗系统,其中,包含供飞机500移动的清洗平台100、清洗飞机500机背的机背清洗组件200、清洗飞机500机腹的机腹清洗组件300、总控组件400、雷达传感器,机背清洗组件200包含第一储液罐201以及分别与第一储液罐201连接的溶气式空化机组202、空化炮203,机腹清洗组件300包含依次连接的第二储液罐
301、微纳米空化机组302、空化喷头组303件,空化喷头组303件安装于清洗平台100的底部,清洗平台100上开设有匹配空化喷头组303件的第一通孔,清洗平台100的两侧等距安装有多个雷达传感器;
49.雷达传感器通过无线连接于总控组件400进行数据交互,总控组件400分别控制连接溶气式空化机组202、空化炮203、微纳米空化机组302、空化喷头组303件。
50.上述的一种用于飞机的非接触柔性清洗系统,其中,总控组件400包含操作触屏、pci控制器、低电压控制柜、高电压控制柜、主电柜,操作触屏控制连接pci控制器,pci控制器分别控制连接低电压控制柜、高电压控制柜、主电柜、空化喷头组303件,低电压控制柜、高电压控制柜、主电柜分别与溶气式空化机组202、空化炮203、微纳米空化机组302连接。
51.上述的一种用于飞机的非接触柔性清洗系统,其中,空化喷头组303件包含安装于清洗平台100底部的多个空化喷头组303,微纳米空化机组302通过第一管路连接任一个空化喷头组303,空化喷头组303之间通过第二管路连接,pci控制器分别控制连接每个空化喷头组303。
52.上述的一种用于飞机的非接触柔性清洗系统,其中,第一储液罐201、第二储液罐301的内部均设有液位传感器与微纳米循环发生器,液位传感器通过无线连接于pci控制器进行数据传输,pci控制器通过无线控制连接微纳米循环发生器。
53.如图2所示,上述的一种用于飞机的非接触柔性清洗系统,其中,溶气式空化机组202包含依次连接的第一超声发生器204、第一超声回旋器205、第一气液混合箱206、气液混合泵207、第一微纳米气泡混合罐208以及与气液混合箱连接的第一活性氧离子发生器209、与气液混合泵207连接的气源箱210;
54.第一超声发生器204通过第一过滤器211连接于第一储液罐201;
55.第一微纳米气泡混合罐208连接于第一储液罐201;
56.空化炮203通过高压水泵212连接于第一储液罐201,空化炮203为摇摆空化炮203;
57.第一活性氧离子发生器209与第一气液混合箱206之间连接有第一纳米气泡控制器218;
58.pci控制器分别控制连接第一超声发生器204、第一超声回旋器205、气液混合泵207、第一活性氧离子发生器209、高压水泵212、第一纳米气泡控制器218。
59.上述的一种用于飞机的非接触柔性清洗系统,其中,第一超声回旋器205与第一气液混合箱206之间依次连接有流量计213、第一节流阀214,气源箱210通过第一单向阀215连接于气液混合泵207,第一微纳米气泡混合罐208上连接有第一排气电磁阀216,第一排气电磁阀216与第一微纳米气泡混合罐208之间安装有压力表217;
60.流量计213、压力表217通过无线与pci控制器连接实现数据交互;
61.pci控制器分别控制连接第一节流阀214、第一排气电磁阀216。
62.第一储液罐201中的水通过第一过滤器211进入第一超声发生器204中,对流经的水进行超声共振,使流动的普通水转换成含有纳米气泡的水质,第一超声发生器204采用双面对穿式振头;随后进入第一超声回旋器205中,第一超声回旋器205是使初级的纳米气泡水在高速流动下产生滚动的回旋涡流,保证纳米气泡在水中存留的时间更长久;随后进入第一气液混合箱206进行存储,第一活性氧离子发生器209对第一气液混合箱206内的水进行气体净化、并增加活性氧离子的生成,当活性氧离子与水分子进行混合时,释放大量活性
氧因子,深入微小缝隙,轻松去除难以去除的污渍;通过气液混合泵207将第一气液混合箱206内的水抽入第一微纳米气泡混合罐208的同时,将含有活性氧的气体经过第一单向阀215输入第一微纳米气泡混合罐208,混合后输送至第一储水罐中,高压水泵212将水从第一储水罐中取出输送至空化炮203进行对飞机500机背的清洗。
63.如图3所示,上述的一种用于飞机的非接触柔性清洗系统,其中,微纳米空化机组302包含依次连接的第二超声发生器304、第二超声回旋器305、第二气液混合箱306、高速旋切泵307、第二微纳米气液混合罐308以及与高速旋切泵307的输入端连接的第二活性氧离子发生器309;
64.第二超声发生器304通过第第二过滤器310与第二储液罐301连接;
65.第二微纳米气液混合罐308连接于第一管路;
66.第二活性氧离子发生器309与第二气液混合箱306之间连接有第二纳米气泡控制器311;
67.pci控制器分别控制连接第二超声发生器304、第二超声回旋器305、高速旋切泵307、第二活性氧离子发生器309、第二纳米气泡控制器311。
68.上述的一种用于飞机的非接触柔性清洗系统,其中,第二超声回旋器305与第二气液混合箱306之间连接有第二单向阀312,高速旋切泵307与第二微纳米气液混合罐308之间连接有第二节流阀313,第一微纳米气泡混合罐208上连接有第二排气电磁阀314;
69.pci控制器分别控制连接第二节流阀313、第二排气电磁阀314。
70.第二储液罐301中的水通过第第二过滤器310进入第二超声发生器304中,对流经的水进行超声共振,使流动的普通水转换成含有纳米气泡的水质,第二超声发生器304采用双面对穿式振头;随后进入第二超声回旋器305中,第二超声回旋器305是使初级的纳米气泡水在高速流动下产生滚动的回旋涡流,保证纳米气泡在水中存留的时间更长久;随后进入第二气液混合箱306进行存储,第二活性氧离子发生器309对第二气液混合箱306内的水进行气体净化、并增加活性氧离子的生成,当活性氧离子与水分子进行混合时,释放大量活性氧因子,深入微小缝隙,轻松去除难以去除的污渍;通过高速旋切泵307将第二气液混合箱306内的水抽入第二微纳米气泡混合罐,随后通过空化喷头组303进行输出对飞机500机腹的清洗。
71.上述的一种用于飞机的非接触柔性清洗系统,其中,清洗平台100的两侧均设有机背清洗组件200。
72.上述的一种用于飞机的非接触柔性清洗系统,其中,清洗平台100的顶部安装有地垫101,地垫101上开设有匹配第一通孔的第二通孔。
73.上述的一种用于飞机的非接触柔性清洗系统的原理是利用微纳米气泡清洗技术吸附、气液两相流扰动和空化作用,将污染物从飞机500表面溶解、吸附、剥离,能够深入复杂结构带走污染物,具有高效、深度清洗的优势;
74.利用微纳米气泡作为清洗介质,分别针对机背和机腹的不同需求开发低压柔性、非接触式的整机清洗专用核心设备,能避免重要涂层损伤,具有更高安全性的优势;
75.基于雷达传感器感应进行视觉识别和智能调参等功能实现清洗全过程的自动化运行,可将整机清洗耗时从人工作业的3-6个小时缩短至10分钟以内,具有快速、无人化的优势。
76.综上,本发明的一种用于飞机的非接触柔性清洗系统,能够解决传统飞机清洗技术中人工擦洗耗时耗力和高压冲洗具有损伤风险的维护难题,形成成套微纳米气泡无人化整机深度清洗系统的快速转化,实现无人化整机快速淋洗,尤其适用飞机临近海面低空飞行返航后及时的盐雾清除,有效缓解飞机腐蚀问题,大大提升战时飞机出勤率和战力,延长飞机寿命。
77.以上对发明的具体实施例进行了描述。需要理解的是,发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;本领域技术人员可以在权利要求的范围内做出各种变形或修改做出若干简单推演、变形或替换,这并不影响发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1