一种煤矿专用电缆的清洁机器人的制作方法
1.本发明属于高空线缆清洁设备领域,尤其涉及一种煤矿专用电缆的清洁机器人。
背景技术:
2.煤矿开采时矿洞内需要大量提供,因此需要大量电缆完成电力输送,但煤矿洞煤灰粉尘较多并且较为潮湿,因此电缆上常会积攒较多渣灰,当渣灰积攒过多时便会影响电缆使用安全,因此需要人工完成定期清理,但矿洞内环境昏暗同时地势不平,人工很难站在梯子上进气清理,目前虽出现一部分用于高空线缆清洁的机器人,但体积较大的同时难以将硬质煤渣铲除借此。借此,设计一种能够针对煤矿专用电缆清洁的机器人具有重要意义。
技术实现要素:
3.本发明的目的是针对现有技术中存在的上述问题,提出了能够针对煤矿内环境复杂的同时进行渣灰清除回收的一种煤矿专用电缆的清洁机器人。
4.为了实现上述目的,本发明采用以下技术方案:一种煤矿专用电缆的清洁机器人,包括电池箱,所述电池箱内设置有多块电池,所述电池箱下方两侧固定设置有摆动底座,所述两侧摆动底座上各转动设置有摆动夹板,两块所述摆动夹板内侧设置有多个传送缺口,每个所述传送缺口两侧固定设置有轴承转接板,两块所述轴承转接板之间转动设置有可夹住线缆并定向移动的传送滚筒,两块所述摆动夹板一侧均固定设置有夹紧块底板,两块所述摆动夹板相对一侧固定设置有多个弹性伸缩杆,每个所述弹性伸缩杆另一端均固定连接夹紧块,所述夹紧块内侧固定设置有清洁筒,单块所述清洁筒呈半圆筒状,所述两块清洁筒通过摆动夹板合拢时呈圆筒状,所述清洁筒内沿圆周方向设置有多个蓄力后可将煤渣铲落的的移动铲刀。
5.优选的,两块所述摆动夹板中部下方固定设置有固定底座,所述固定底座上设置有通孔,其中一个通孔转动设置有螺杆,另一个所述通孔处上固定设置有螺母座,所述螺杆与螺母座配合连接。此设计通过螺杆与螺母座的配合传动完成了设备在线缆上工作时便于夹紧,同时通过调节螺杆转动长度可使用于不同粗细的线缆。
6.优选的,靠近所述清洁筒一侧的传送滚筒上设置有第一驱动电机,所述第一驱动电机输出端固定连接于传送滚筒上,所述第一驱动电机固定设置于下方的第一驱动电机底座上。此设计解决了设备在线缆上运动的动力问题。
7.优选的,所述清洁筒一侧设置有倾斜向内的进料口,所述进料口一侧沿圆周方向设置有气压底座,每个所述气压底座一侧设置有两个顶杆底座,每个所述顶杆底座内均滑动设置有顶杆,所述顶杆一端固定设置有移动铲头,所述顶杆底部设置有弹簧,所述弹簧外侧设置有压力传感器,所述气压底座一侧连接设置有进气管,所述所述清洁筒另一侧设置有贴合线缆的环形刮刀,所述进气管穿过环形刮刀伸出清洁筒一侧。此设计考虑煤渣容易在线缆上进行堆积而发生变硬情况,通过移动铲头经过气压推动清除较硬物质,环形刮刀完成对线缆全身进行刮处,能够有效完成线缆的清理。
8.优选的,所述清洁筒于移动铲头与环形刮刀下方设置有第一排料口,一个所述清洁筒外侧固定设置有渣灰收集环,所述渣灰收集环在两个清洁筒合并时能包裹住下方,所述渣灰收集环下方设置有渣灰排污口。此设计能有效避免渣灰铲除后掉落污染空气的情况出现。
9.优选的,其中一块所述摆动夹板上固定设置有气泵箱,所述气泵箱内设置有泵机,所述气泵想一侧设置有排气口,所述排气口通过管道连接于气压底座下方设置的进气管处。
10.优选的,另一块所述摆动夹板上固定设置有煤渣处理箱,所述煤渣处理箱一侧设置有渣灰入料口,所述煤渣处理箱底部设置有渣灰排料口,所述煤渣处理箱内部设置除碱液喷头,所述除碱液喷头两侧设置有第二驱动电机,所述第二驱动电机输出端固定设置有搅拌杆。此设计能有效完成渣灰收集后的回收利用,将渣灰碱性去除后便能多方使用。
11.有益效果:
12.1.本发明通过清洁筒上的移动铲头的设计能够有效清楚电缆上硬质结块煤渣的清除。
13.2.本发明通过煤渣处理箱的设计能够有效完成渣灰清除后的回收利用。
14.3.本发明通过摆动夹板与传动滚筒的设计使得该设备能够针对多种粗细不同的电缆完成清除。
附图说明
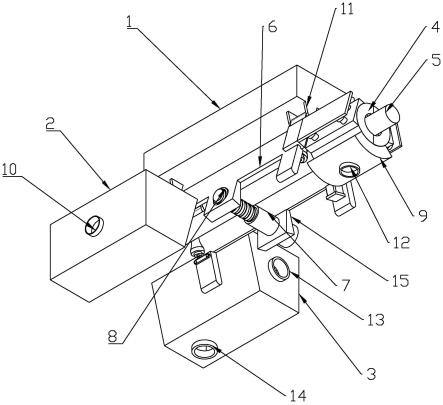
15.图1为本发明的1立体图;
16.图2为本发明的主视图;
17.图3为本发明的左视图;
18.图4为图2中a-a处的立体剖视图;
19.图5为图2中b-b处的立体剖视图;
20.图6为图3中c-c处的立体剖视图;
21.图7为清洁筒零件的立体图;
22.图8为清洁筒零件的主视图;
23.图9为图8中d-d处的立体剖视图;
24.图中:电池箱1,电池15,摆动底座11,摆动夹板6,传送缺口16,轴承转接板16,线缆5,传送滚筒18,夹紧块底板29,弹性伸缩杆30,夹紧块30,清洁筒4,移动铲刀20,固定底座15,螺杆7,螺母座8,第一驱动电机27,第一驱动电机底座32上,进料口33,气压底座35,顶杆底座37,顶杆36,弹簧38,压力传感器39,进气管34,环形刮刀23,第一排料口21,渣灰收集环9,渣灰排污口12,气泵箱2,泵机24,排气口10,煤渣处理箱3,渣灰入料口13,渣灰排料口14,除碱液喷头26,第二驱动电机31,搅拌杆25。
具体实施方式
25.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
26.在本发明的描述中,需要说明的是,术语“内”、“下”等指示的方位或位置关系为基
于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
27.结合附图1-9,一种煤矿专用电缆的清洁机器人,包括电池箱1,其特征在于,电池箱1内设置有多块电池15,电池箱1下方两侧固定设置有摆动底座11,两侧摆动底座11上各转动设置有摆动夹板6,两块摆动夹板6内侧设置有多个传送缺口16,每个传送缺口16两侧固定设置有轴承转接板16,两块轴承转接板16之间转动设置有可夹住线缆5并定向移动的传送滚筒18,两块摆动夹板6一侧均固定设置有夹紧块底板29,两块摆动夹板6相对一侧固定设置有多个弹性伸缩杆30,每个弹性伸缩杆30另一端均固定连接夹紧块30,夹紧块30内侧固定设置有清洁筒4,单块清洁筒4呈半圆筒状,两块清洁筒4通过摆动夹板6合拢时呈圆筒状,清洁筒4内沿圆周方向设置有多个蓄力后可将煤渣铲落的的移动铲刀20。
28.进一步的,两块摆动夹板6中部下方固定设置有固定底座15,固定底座15上设置有通孔,其中一个通孔转动设置有螺杆7,另一个通孔处上固定设置有螺母座8,螺杆7与螺母座8配合连接。
29.进一步的,靠近清洁筒4一侧的传送滚筒18上设置有第一驱动电机27,第一驱动电机27输出端固定连接于传送滚筒18上,第一驱动电机27固定设置于下方的第一驱动电机底座32上。
30.进一步的,清洁筒4一侧设置有倾斜向内的进料口33,进料口33一侧沿圆周方向设置有气压底座35,每个气压底座35一侧设置有两个顶杆底座37,每个顶杆底座37内均滑动设置有顶杆36,顶杆36一端固定设置有移动铲刀20,顶杆36底部设置有弹簧38,弹簧38外侧设置有压力传感器39,气压底座35一侧连接设置有进气管34,清洁筒4另一侧设置有贴合线缆5的环形刮刀23,进气管34穿过环形刮刀23伸出清洁筒4一侧。
31.进一步的,清洁筒4于移动铲刀20与环形刮刀23下方设置有第一排料口21,一个清洁筒4外侧固定设置有渣灰收集环9,渣灰收集环9在两个清洁筒4合并时能包裹住下方,渣灰收集环9下方设置有渣灰排污口12。
32.进一步的,其中一块摆动夹板6上固定设置有气泵箱2,气泵箱2内设置有泵机24,气泵箱2一侧设置有排气口10,排气口10通过管道连接于气压底座35下方设置的进气管34处。
33.进一步的,另一块摆动夹板6上固定设置有煤渣处理箱3,煤渣处理箱3一侧设置有渣灰入料口13,渣灰入料口13通过管道与渣灰收集环9底部的渣灰排污口12连接,煤渣处理箱3底部设置有渣灰排料口14,煤渣处理箱3内部设置除碱液喷头26,除碱液喷头26两侧设置有第二驱动电机31,第二驱动电机31输出端固定设置有搅拌杆25。
34.工作原理:设备启动前,工作人员将设置于固定底座15上的螺杆7从螺母座8上完全拧开,当螺杆7全部拧开后,将摆动夹板6向外掰开后,掰开过程中摆动夹板6也将带动各自固定的清洁筒4向外移动,掰开后工作人员将设备从上方放置电缆5上,放置时传送滚筒18凹陷处要对准电缆5外侧,同时清洁筒4圆心也要与电缆5同心,放置完毕后,操作人员重新将螺杆7拧入螺母座8内,拧入过程中摆动夹板6也将带动传送滚筒18向内移动,直至传送滚筒18凹陷处贴至电缆5外侧即可,在传送滚筒18贴至电缆5外侧同时,清洁筒4也会将电缆
5包裹住并逐渐贴近,当清洁筒4贴近后传送滚筒18仍未贴近时,设置于摆动夹板6相对一侧固定设置的弹性伸缩杆30便受力,能有效避免清洁筒4过度受力。
35.此时第一驱动电机27启动,第一驱动电机27输出端带动传送滚筒18转动,从而驱动与之啮合的另外的传动滚筒18转动,从而驱动设备沿着电缆向前移动,带有渣灰的电缆将不断从清洁筒4前侧的进料口33进入,带有渣灰的电缆进入进料口33后将先于移动铲刀20发接触,一些附着较少的部分便会被铲除,若该部分渣灰较硬便会顶着移动铲刀20向后移动,从而带动设置于移动铲刀20后端面的顶杆36沿着顶杆底座37的方向向气压底座35内移动,从而使设置于顶杆36一侧的弹簧38,此时若是渣灰较软便会被弹簧38释放的力道铲除,若渣灰较硬便会继续推动顶杆36向下移动,直至顶杆36与设置于气压底座35底部的压力传感器39发生接触,压力传感器39接受信号,从而启动设置于摆动夹板6上的气泵箱2的泵机24,泵机24通过排气口10连接管道至进气管34处进行压力输送,从而将气压底座35内充满气体,气压底座35内压力过大,从而驱动顶杆36向前移动,从而将移动铲刀20向前推动,而受力过久的弹簧38也会释放压力,从而使移动铲刀20能够更快速度向前移动,从而将硬质渣灰铲除,在本设计中有效的利用了弹簧与泵机的动力提供,设置了两道铲除工序分别是渣灰较软与渣灰较硬的处理方式,有效避免泵机多次使用,能够避免环境资源的浪费。
36.硬质渣灰处理完后的线缆外侧仍有部分灰尘未清除干净,因此设置于移动铲刀20后方的环形刮刀23将贴至线缆外侧进行进一步去除,去除的渣灰将从下方的第一排料口21排出,排出的渣灰将通过下方渣灰收集环9进行收集后,通过渣灰排污口12连接管道至煤渣处理箱3一侧的渣灰入料口13处并排入。本设计解决渣灰重新撒入空中,有效避免空气的二次污染。
37.第二驱动电机31启动,第二驱动电机31带动设置于输出端的搅拌杆25转动,从而将进入煤渣处理箱3内的煤渣进行搅拌,搅拌的同时,除碱液喷头26也将喷出除碱液到煤渣上,并通过搅拌杆25混合搅拌使其去除碱性,完成二次回收。
38.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1