自动高压清洗机的制作方法
1.本发明涉及清洗设备技术领域,具体涉及一种自动高压清洗机。
背景技术:
2.高压清洗机是利用高压水冲洗物体表面的机器,可用于养殖场等容易产生顽固污垢的场景中。常规的清洗方式为人工手持高压水枪进行清洗,工作强度较大。于是,公开号为cn205851459 u的中国专利公开了一种多方位移动清洗的高压泵清洗机,能够搭载高压泵进行高压清洗工作,高压泵前端导出的高压喷枪装置能在轨道架上移动运行进行清洗工作。
3.但是,现有的清洗机仅能够驱动喷头做线性运动,所清洗的范围仅限于线性轨迹确定的平面而无法覆盖立体空间进行全方位的清洗。
技术实现要素:
4.本发明提供一种自动高压清洗机,以解决现有的清洗机清洗范围不足,喷头移动方式不够灵活的技术问题。
5.为解决上述技术问题,本发明采用如下技术方案:设计一种自动高压清洗机,包括机架以及设置于所述机架底部的行走机构,以及纵向旋转机构,设置于所述机架的顶部;横向旋转机构,设置于所述纵向旋转机构的端部;清洗管路,连接于所述纵向旋转机构和所述横向旋转机构上,该清洗管路的端部连接有清洗喷头。
6.进一步的,所述纵向旋转机构包括支撑臂、横向臂,所述支撑臂设置于所述机架的顶部,所述支撑臂上设置有第一蜗杆及驱动第一蜗杆转动的第一动力源,所述横向臂上设置有和所述第一蜗杆匹配的第一蜗轮。
7.进一步的,所述支撑臂包括竖向且平行设置的两个,所述横向臂插接在所述支撑臂上,所述第一动力源安装在其中一个所述支撑臂内部。
8.进一步的,所述横向臂为可伸缩结构。所述横向臂包括多节套接的支管,相邻两节所述支管通过螺钉锁紧连接,所述机架上设有置物槽,所述置物槽内设置有加长臂,所述加长臂能够套接在所述支管上。
9.进一步的,所述横向旋转机构包括设置于所述纵向旋转机构端部的第二蜗杆及驱动第二蜗杆转动的第二动力源,所述清洗接头安装在所述第二蜗杆的下方,所述清洗接头上设置有和所述第二蜗杆匹配的第二蜗轮。
10.进一步的,所述清洗接头上还设置有限位块,所述横向旋转机构上设有和所述限位块配合的挡板。
11.进一步的,所述机架下部形成有密闭的壳体,该壳体内部底面设置有蓄电池,侧面安装有控制电路板,所述壳体的前面为倾斜面,其上设置有触摸屏。
12.进一步的,所述壳体的后面设置有进水口,所述清洗管路穿过所述壳体内部并连
接于所述进水口和所述清洗喷头之间,所述清洗管路和所述进水口的连接部设置有分水管以将所述清洗管路分为多个支路,每一条支路上均安装有电磁阀。
13.进一步的,所述机架的两侧设置有导向轮,所述壳体的前后两侧面设置有障碍物检测传感器。
14.与现有技术相比,本发明的有益技术效果在于:1.本发明利用带行走轮的机架承载分向两侧的高压清洗水管,能够在行走的过程中对两侧的区域进行高压冲洗,在冲洗时通过横向臂的自转实现对清洗机前后的区域进行清洗,通过高压喷头的自转实现对清洗机左右的区域进行清洗,通过上述方式实现全方位立体式的自动行走清洗。
15.2.本发明在壳体的前部设置障碍物传感器,当清洗机行走至墙体时传感器向控制器发送指令,控制清洗机停止行走,对墙角等难以清洗的部位进行固定一段时间的冲洗,之后清洗机倒行返回沿原路进行二次清洗。
16.3.本发明在两侧设置导向轮防止清洗机和侧面墙壁发生碰撞而停止行走,在壳体的前面设置倾斜面,将操作面板设置在倾斜面上,方便操作。
附图说明
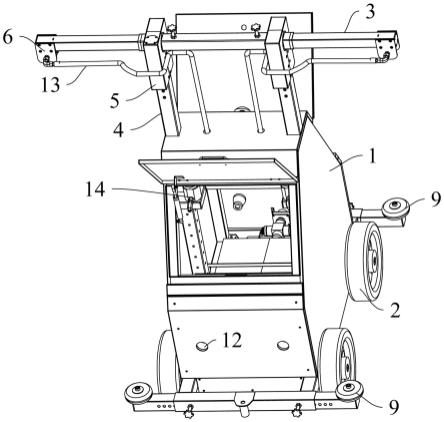
17.图1为本发明自动清洗机的结构示意图之一。
18.图2为本发明自动清洗机的结构示意图之二。
19.图3为本发明自动清洗机的结构示意图之三。
20.图4为本发明自动清洗机的纵向旋转机构的结构示意图。
21.图5为图4的左视图。
22.图6为本发明自动清洗机的横向旋转机构的结构示意图。
23.图7为图6中a-a的剖视图。
24.图8为本发明自动清洗机的旋转喷头的结构示意图。
25.图9为图8中b-b的剖视图。
26.图中,壳体1,行走轮2,横向臂3,支撑臂4,纵向驱动组件5,横向驱动组件6,高压喷头7,置物槽8,导向轮9,触摸屏10,进水口11,传感器12,清洗管路13,电磁阀14,盖板15,紧固螺钉301,电机座302,轴承303,第一蜗轮304,第一蜗杆305,第一电机306,第二电机601,第二蜗杆602,第二蜗轮603,侧板604,喷嘴701,限位块702,挡块703,接口704,旋转外套筒705,转轴706。
具体实施方式
27.下面结合附图和实施例来说明本发明的具体实施方式,但以下实施例只是用来详细说明本发明,并不以任何方式限制本发明的范围。
28.实施例1:一种自动高压清洗机,参见图1至图3,包括机架以及设置于机架底部的行走机构。其中,机架下部形成密闭的壳体1,可采用钢制结构,防水防尘。该壳体1内部底面安装蓄电池,利用蓄电池的自重提高整机行走的稳定性,蓄电池通过驱动板控制壳体底面的行走轮2,在壳体1的侧面安装导向轮9,当清洗机行走至侧墙时降低摩擦,防止由于碰撞而停止移动。在壳体内部还安装有控制电路板用于驱动清洗管路13上的电磁阀14,壳体1的
前面设置为倾斜面,其上设置有触摸屏10,可以手动输入控制指令或查看清洗机状态。壳体1的前后侧面均设置盖板15,盖板15和壳体1转动连接,在盖板15上设置伸缩杆14起支撑作用,伸缩杆14的两端分别和盖板15以及壳体1转动连接,方便打开盖板15对清洗机内部进行维护。在壳体1的前后两侧还设置有传感器12,用于检测前方是否存在障碍物,传感器12可采用红外传感器。
29.在壳体1的后侧面设置有进水口11,清洗管路13穿过壳体1内部并连接于进水口11和清洗喷头7之间,清洗管路13和进水口11的连接部设置有三通管作为分水管以将清洗管路13分为左右两个支路,每一条支路上均安装有电磁阀14,左右两条支路向上穿出壳体1并沿支撑臂4和横向臂3连接于清洗喷头7上。
30.在壳体1的顶部,两支撑臂4竖向固定于两侧,顶端设置纵向驱动组件5,参见图4和图5,横向臂3插接在纵向驱动组件5上。纵向旋转组件5包括电机座302以及设置在内部的第一蜗杆305、驱动第一蜗杆305转动的第一电机306,横向臂3上固定设置有和第一蜗杆305匹配的第一蜗轮304,第一电机306可采用直流电机、伺服电机、步进电机,工作时,第一电机306驱动第一蜗杆305旋转,带动第一蜗轮304转动,实现横向臂3的自转。
31.在本实施例中,横向臂3包括多节套接的支管,该支管可以是方管或圆管,相邻两节支管通过紧固螺钉301锁紧连接,在壳体1上设有置物槽8,置物槽8内放置有横向臂3的加长臂,加长臂的结构和横向臂3的支管相同。使用时,可将加长臂从置物槽8中取出嫁接在横向臂3上以调节横向臂3的长度。
32.在一些其它实施例中,可以将横向臂3左右两侧的支管通过伸缩电机控制其长度,例如在纵向驱动机构5两侧的横向臂上安装电动推杆,通过电机来调整横向臂3的长度。
33.在横向臂3的两端设置横向旋转机构,参见图6和图7,包括设置于横向臂3内部的第二电机601、第二蜗杆602,高压喷头7安装在第二蜗杆602的下方,高压喷头7上固定设置有和第二蜗杆602匹配的第二蜗轮603。高压喷头可转动连接在侧板604上,侧板604和横向臂3固定连接。
34.高压喷头7的结构参见图8和图9,包括转动连接的转轴706和旋转外套筒705,转轴706和侧板604固定连接,在高压喷头7上还设置有限位块702,在侧板604上设有和限位块配合的挡板,限位块702设置有两个,挡板设置在两限位块702之间,将高压喷头7的转动角度约束在两限位块702之间。喷嘴701设置在旋转外套筒705上,通过螺纹等方式可拆卸连接,方便更换,喷嘴701可采用出水形状为直线形、锥形、扇形等不同规格。清洗管路13通过转轴706端部的接头704和喷嘴701相连通。
35.上述自动高压清洗机的运行过程如下:启动清洗机,其沿直线方向开始行走,在行走的过程中通过横向臂3的自转带动高压喷头7对清洗机前后区域进行清洗,通过高压喷头7的自转实现对清洗机左右区域进行清洗,当清洗机行走至尽头前端的传感器检测到障碍物时,停止行走,静止冲洗墙角等难清洗的部位,一段时间后清洗机倒行原路返回进行二次冲洗,实现全方位立体式的自动行走清洗。
36.上面结合附图和实施例对本发明作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本发明宗旨的前提下,还可以对上述实施例中的各个具体参数进行变更,形成多个具体的实施例,均为本发明的常见变化范围,在此不再一一详述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1