异位土壤修复处理装置和方法与流程
1.本发明涉及土壤修复设备领域,具体涉及一种异位土壤修复处理装置和方法。
背景技术:
2.异位土壤修复具有污染源清除彻底、修复地块环境潜在风险小等优点,是一种广泛应用的土壤修复模式。
3.地块修复工程中常用的异位土壤修复技术主要包括固化稳定化技术、氧化还原技术、热脱附技术、土壤淋洗技术等。其中,热脱附技术和土壤淋洗技术机械化程度较高,而更加常用的固化稳定化技术、氧化还原技术,则机械化程度、精细程度更低,主要体现在固化剂或是氧化还原药剂与污染土壤混合过程,有的直接采用人工撒料,不仅可能造成材料扬尘浪费,更有甚至危害施工人员的健康安全。
4.公开号为cn 107321253 a的专利说明书公开了一种土壤修复装置的搅拌筒,包括筒体,筒体内通过隔板分为两个仓室,两个仓室内分别设有搅拌装置以及提升装置,筒体的顶部设有入料斗,搅拌装置包括搅拌电机以及搅拌轴,搅拌轴垂直的分布在筒体内部,搅拌轴上分别均匀的安装有搅拌杆,搅拌杆的杆身上固定有若干与搅拌杆垂直的圆片;筒体另一仓室内固定安装有一根提升轴,提升轴的轴身上固定安装有提升螺旋;两个仓室之间通过水平螺旋连接;搅拌轴为空心轴,搅拌轴与加药罐连接。
5.上述专利技术中,其一进料依靠筛网进行筛分,筛分效率低且容易造成筛网堵塞;其二筛分过程与搅拌过程一体化需要占用更多的空间,其三所述搅拌轴以及提升轴均为空心轴,并且所述搅拌杆也为空心的杆体,圆片以及提升螺旋的内部为空腔结构,并且所述圆片、提升螺旋的两侧均匀分布若干喷药孔,以上结构极易导致搅拌轴、提升轴、搅拌杆、提升螺旋在长期土体压力下断裂,同时,在土体挤压下容易造成喷药孔堵塞,从而影响修复效果;其四侧边出料口设置可能会导致土壤不能完全排出。
6.公开号为cn 108188167 a的专利说明书公开了一种搅拌式土壤污染循环治理装置,包括加工壳体和循环壳体,所述加工壳体右侧设有循环壳体,加工壳体上设有进料管、搅拌管道,搅拌管道上设有搅拌杆、搅拌翅片和鳞片,循环壳体上端设有提升转轴、螺旋叶片、滤网板和排水口,加工壳体和循环壳体之间设有循环出口和循环进口,循环壳体右壁设有排料管道,排料管道上设有阀门,循环壳体上端右侧铆接设有电机,加工壳体下端左侧和循环壳体下端右侧对称垂直焊接设有支撑杆,支撑杆下端连接设有防滑底座。
7.上述专利技术中,较为复杂的双腔结构及循环出口、循环进口可能导致土壤在装置中运行困难,导致处理效率低;同时,与cn107321253a专利技术一样,搅拌管道上的贯穿孔在土体挤压下容易造成堵塞,从而影响修复效果。
8.现有技术存在药剂开孔易堵塞、搅拌仓复杂或不规则形状导致的土壤处理效率低、设备智能自动化程度低等问题,同时,考虑到与污染土壤接触的部件的材料的耐磨、耐腐蚀、抗强氧化的更少。针对以上问题,本发明提供一种高效、智能的异位土壤修复处理装置。
技术实现要素:
9.针对上述技术问题以及本领域存在的不足之处,本发明提供了一种异位土壤修复处理装置,可高效智能、无死角地进行土壤异位修复处理。
10.一种异位土壤修复处理装置,其特征在于,包括:
11.搅拌室,由顶面、底面、两弧形侧面和两端面组成;搅拌室内壁铺贴有合金材质、表面光滑的小衬板,顶面中心设置进料斗,底面设置带有出料阀的出料口;搅拌室顶面位于进料斗周围设置多个用于加药的喷淋器;喷淋器上设有多个带有喷淋阀片的喷淋孔;搅拌室底面自两端面底端到出料口形成向下的斜面;斜面上设有多个称重组件;所述称重组件包括称重传感器和用于固定连接所述称重传感器和斜面并保持所述称重传感器水平的垫层;
12.上下两根横向布置于搅拌室内且分别位于两个平行的竖直面、按相反方向旋转的搅拌轴,所述搅拌轴的一端与固定于搅拌室一端面外侧壁的搅拌减速电机相连,另一端固定于搅拌室另一端面内侧壁;所述搅拌轴上焊接有双螺旋搅拌臂;双螺旋搅拌臂与所述搅拌轴之间设置多个平行排列的刀片;
13.8个搅拌叉,分别设于搅拌室内端面、弧形侧面与顶面,或,端面、弧形侧面与底面三者连接处;搅拌叉包括一端与固定于搅拌室端面外侧壁的搅拌叉电机连接的可伸缩的自转轴和连接在所述自转轴另一端的搅拌臂;搅拌叉的搅拌臂可在所述自转轴旋转带动下进行搅动,且与所述搅拌轴同时运动;
14.多个湿度传感器,设于搅拌室端面且位于上下两根所述搅拌轴之间,用于测量土壤含水率;
15.智能控制面板,与进料斗、所述搅拌减速电机、喷淋阀片、所述湿度传感器、所述称重传感器、搅拌叉电机、所述出料阀电连接;
16.所述搅拌轴、双螺旋搅拌臂、刀片、喷淋阀片、搅拌叉、所述出料阀与土壤接触的部位均经过合金涂层处理。
17.本发明装置通过搅拌室内双搅拌轴的相反方向运动,推动污染土壤在双螺旋搅拌臂中完成多轨迹运动,通过8个搅拌叉的运动设计,打碎堆积在死角的土壤,防止其沉积,促进搅拌室内土壤无死角的全方位运动,达到污染土壤与药剂高效混合、搅拌目的,双螺旋搅拌臂配置刀片的方案可防止土体搅拌过程中的成团结块,搅拌室内壁采用小衬板铺贴,搅拌轴、双螺旋搅拌臂、刀片、喷淋阀片、搅拌叉、出料阀均经过合金涂层处理,具有耐磨、耐腐蚀、耐氧化作用,智能控制面板与进料斗、搅拌减速电机、喷淋器、湿度传感器、称重传感器、搅拌叉电机、出料阀均有元件相连接,通过程序编码实现从进料、配药、药剂与污染土壤混合搅拌到出料的高精度自动控制。
18.在一优选例中,所述的异位土壤修复处理装置,喷淋器通过输送管、加药泵与药剂混合罐的出药口连接;
19.药剂混合罐的进水口通过导管与水泵连接,进药口通过带有药剂流量阀的药剂流量管与药剂储存盒连接;
20.智能控制面板与加药泵、药剂混合罐、水泵、所述药剂流量阀、药剂储存盒电连接。
21.在一优选例中,所述的异位土壤修复处理装置,所述异位土壤修复处理装置还包括外壳,搅拌室设于外壳内,外壳底部焊接底座,底座下对称焊接减震支架。
22.在一优选例中,所述的异位土壤修复处理装置,小衬板通过沉头螺钉与搅拌室内
壁紧固连接。
23.在一优选例中,所述的异位土壤修复处理装置,刀片为矩形片状,沿中轴线的一端通过第一端轴与双螺旋搅拌臂固定,另一端通过第二端轴与所述搅拌轴固定。
24.在一优选例中,所述的异位土壤修复处理装置,所述异位土壤修复处理装置的进料由皮带传送或allu斗配合进料斗进行。
25.在一优选例中,所述的异位土壤修复处理装置,斜面的坡度为10%~30%。
26.本发明还提供了一种异位土壤修复处理方法,使用所述的异位土壤修复处理装置;
27.所述异位土壤修复处理方法包括:
28.经筛分预处理的待处理污染土壤经进料斗进入搅拌室,称重传感器、湿度传感器测量待处理污染土壤的重量和土壤含水率,打开喷淋阀片,向搅拌室内喷淋药剂,单次喷淋时间为10~20s,药剂添加量为待处理污染土壤质量的0.1%~10%,土壤含水率控制在10%~65%,药剂喷淋完毕关闭喷淋阀片,开启搅拌减速电机带动两根搅拌轴按相反方向旋转,开启搅拌叉电机带动搅拌叉进行搅拌,待处理污染土壤在搅拌室内水平、上下循环往复运动并被刀片切割破碎,与药剂充分混匀,单次搅拌时间2~5min,药剂喷淋与搅拌交替进行,搅拌结束开启出料阀出料。
29.本发明与现有技术相比,有益效果有:
30.本发明提供的一种高效智能异位土壤修复处理装置,智能自动化程度高,智能控制面板与进料斗、搅拌减速电机、水泵、药剂混合罐、药剂储存盒、喷淋器、湿度传感器、称重传感器、搅拌叉电机、出料阀均有元件相连接,装置配置至少2个称重传感器、至少2个湿度传感器,称重传感器、湿度传感器质量控制精度均在0.1%范围内,能够精确称量进料的质量、含水率,通过程序设定土壤药剂投加比例、含水率等技术参数,从而控制药剂投加量及水量。
31.本发明提供的一种高效智能异位土壤修复处理装置无筛分结构,仅有一个搅拌室,内置两根搅拌轴,搅拌轴配置的双螺旋搅拌臂使得土壤在搅拌室内按照正弦曲线轨迹运动以及左右循环运动轨迹,在土壤重力条件下还有上下循环运动轨迹,多轨迹运动使得土壤在搅拌室内得到充分搅拌,实现高效搅拌目的。同时,位于搅拌臂之间的刀片结构能在搅拌过程中切割土体,防止土壤成团结块,进一步提高与药剂的混合效率。
32.进一步,本发明提供的一种高效智能异位土壤修复处理装置,搅拌叉与搅拌轴同时运动,自转轴可伸缩,即使位于搅拌室死角的土体也能轻松有效的搅拌。
33.土壤从进料到修复处理结束出料总计仅需5~7min,每个处理周期可修复处理1.2t的污染土壤。
34.本发明提供的一种高效智能异位土壤修复处理装置在结构简单、占地面积小的前提下可以提高土壤搅拌效率,出料速度快,提高土壤修复处理效率。
35.本发明提供的一种高效智能异位土壤修复处理装置,搅拌室内壁铺贴小衬板,小衬板为合金材质,表明光滑,具有耐磨、耐腐蚀、抗强氧化功能;双螺旋搅拌臂为金属材质,表面经过合金涂层处理,处理后表明光滑,且兼具耐磨、抗强氧化、耐腐蚀的功能。可以有效避免药剂对装置的腐蚀、氧化作用以及土壤砂砾长期摩擦,同时光滑的内壁及搅拌臂可以有效防止搅拌过程土壤的粘挂。
附图说明
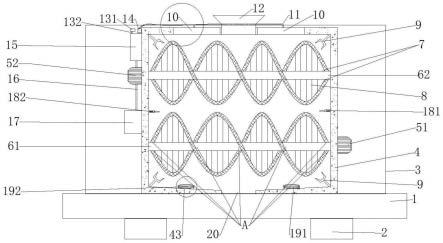
36.图1为实施例的异位土壤修复处理装置的主视结构示意图;
37.图2为实施例的异位土壤修复处理装置的双螺旋搅拌臂和刀片的结构示意图;
38.图3为实施例的异位土壤修复处理装置的称重传感器和垫层的结构示意图;
39.图4为实施例的异位土壤修复处理装置的喷淋器结构示意图;
40.图5为实施例的异位土壤修复处理装置的小衬板结构和布置示意图;
41.图6为实施例的异位土壤修复处理装置的侧视结构示意图。
具体实施方式
42.下面结合附图及具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。下列实施例中未注明具体条件的操作方法,通常按照常规条件,或按照制造厂商所建议的条件。
43.参见图1,本实施例的异位土壤修复处理装置包括搅拌室4和外壳3,搅拌室4设于外壳3内,外壳3底部焊接底座1,底座1下对称焊接减震支架2。
44.搅拌室4由顶面、底面、两弧形侧面和两端面组成。
45.参见图5,搅拌室4内壁铺贴有合金材质、表面光滑的小衬板41,小衬板41通过沉头螺钉42与搅拌室4内壁紧固连接。
46.参见图1,搅拌室4底面设置带有出料阀的出料口20;搅拌室4底面自两端面底端到出料口20形成向下的斜面43。斜面43的坡度可设计为10%~30%,方便出料。斜面43上设有2个称重传感器191、192,以及用于固定连接称重传感器191、192和斜面43并保持称重传感器191、192水平的垫层193,垫层可根据斜面43坡度调整两侧厚度,具体可参见图3。称重传感器质量控制精度在0.1%范围内。
47.参见图1,搅拌室4顶面中心设置倒梯形结构的进料斗12。本实施例的异位土壤修复处理装置的进料可由皮带传送或allu斗配合进料斗12进行,施工方便,可操作性强,简化筛分工序,可提高装置的处理效率。
48.参见图1,搅拌室4顶面位于进料斗12周围设置2个用于加药的喷淋器10。喷淋器10通过输送管11、加药泵14与药剂混合罐15的出药口连接;药剂混合罐15的进水口通过导管16与水泵17连接,进药口通过带有药剂流量阀的药剂流量管132与药剂储存盒131连接。参见图4,喷淋器10上设有多个带有喷淋阀片102的喷淋孔101。
49.参见图1,搅拌室4内布置上下中心对称的两根横向、按相反方向旋转的搅拌轴61、62,搅拌轴61、62分别位于两个平行的竖直面,各自一端与固定于搅拌室4一端面的搅拌减速电机51、52相连,另一端固定于搅拌室4另一端面。搅拌轴61、62上焊接有双螺旋搅拌臂7,双螺旋搅拌臂7呈正弦曲线分布,焊接位点如图1中a所示。双螺旋搅拌臂7与搅拌轴61、62之间设置多个平行排列的刀片8。参见图2,以搅拌轴62为例,刀片8为矩形片状,沿中轴线的一端通过第一端轴81与双螺旋搅拌臂7固定,另一端通过第二端轴82与搅拌轴62固定,使得土壤与药剂混合液在多轨迹运动中充分混合搅拌、切割、破碎,极大提高装置的处理效率。
50.参见图1、图6,搅拌叉电机22固定于搅拌室4端面外侧壁,与搅拌叉9一一对应连接,搅拌叉9共8根,分别布置在搅拌室4内端面、弧形侧面与顶面,或,端面、弧形侧面与底面三者连接处,搅拌叉9与搅拌室4端面成45度夹角。搅拌叉9包括一端与搅拌叉电机22连接的
可伸缩的自转轴和连接在所述自转轴另一端的搅拌臂,该搅拌臂与最近的双螺旋搅拌臂7旋转面的距离为10~15cm。搅拌叉9的搅拌臂可在所述自转轴旋转带动下进行搅动,且与搅拌轴61、62同时运动,自转轴可伸缩,即使位于搅拌室4死角的土体也能轻松有效的搅拌。
51.参见图1,2个湿度传感器181、182设于搅拌室4端面且位于上下两根搅拌轴61、62之间,用于测量土壤含水率,湿度传感器控制精度在0.1%范围内。
52.进料斗12,搅拌减速电机51、52,搅拌叉电机22,喷淋阀片102,湿度传感器181、182,称重传感器191、192,所述出料阀,加药泵14,药剂混合罐15,水泵17,所述药剂流量阀以及药剂储存盒131均与智能控制面板21电连接。通过程序编码实现从进料、配药、药剂与污染土壤混合搅拌到出料的高精度自动控制。
53.搅拌轴61、62,双螺旋搅拌臂7,刀片8,喷淋阀片102、搅拌叉9以及所述出料阀与土壤接触的部位均经过合金涂层处理,具有耐磨、耐腐蚀、耐氧化作用。
54.采用本实施例的异位土壤修复处理装置进行异位土壤修复处理,待处理土壤从进料到修复处理结束出料总计仅需5~7min,每个处理周期可修复处理1.2t的污染土壤,操作方便,自动化程度高,误差小,处理高效。
55.具体操作过程包括:
56.经allu斗筛分预处理的待处理污染土壤经进料斗12进入搅拌室4,称重传感器191、192和湿度传感器181、182测量待处理污染土壤的重量和土壤含水率,数据通过电子元件传输到智能控制面板21,程序设置参数;待处理污染土壤的重量取称重传感器191、192的平均值,土壤含水率取湿度传感器181、182的平均值,药剂添加量为待处理污染土壤质量的0.1%~10%,土壤含水率控制在10%~65%。
57.根据项目技术参数设置的药剂添加量、含水率,结合称重传感器191、192和湿度传感器181、182测定的待处理的污染土的平均质量、平均含水率,计算需要的稳定化药剂/化学还原药剂干粉质量及水质量,数字信号传导至药剂储存盒131及水泵17,药剂储存盒131吸取相应质量的干粉药剂通过药剂流量管132,与药剂混合罐15接触部位的阀门自动打开,干粉药剂进入药剂混合罐15,进药完毕后水泵17泵取相应质量的水通过导管16进入药剂混合罐15,混合时间设置30s~1min。
58.干粉药剂与水混合完毕后通过加药泵14泵送到输送管11,通过输送管11进入两个喷淋器10内。打开喷淋阀片102,向搅拌室4内喷淋药剂,单次喷淋时间为10~20s,药剂喷淋完毕关闭喷淋阀片102。开启搅拌减速电机51、52带动两根搅拌轴61、62按相反方向旋转,同时开启搅拌叉电机22,搅拌叉电机22带动搅拌叉9开始伸缩旋转搅动,待处理污染土壤在搅拌室4内左右、上下循环往复运动并被刀片8切割破碎,角落土体被搅拌叉9搅拌,与药剂充分混匀,单次搅拌时间2~5min,药剂喷淋与搅拌交替进行,喷淋停止进行搅拌,搅拌停止进行喷淋,可有效保证药剂混合液与待处理土壤混合均匀、充分,搅拌结束开启出料阀出料,出料时间设置30s~1min。
59.此外应理解,在阅读了本发明的上述描述内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1