用于粉状物料装卸过程中的污染物收集与处理装置的制作方法
1.本实用新型涉及污染治理技术领域,更加具体来说,本实用新型涉及一种用于粉状物料装卸过程中的污染物收集与处理装置。
背景技术:
2.粉状物料或产品在向运输车辆装卸过程中颗粒物、vocs等污染物的逸散是不容忽视的,如砂石骨料装卸、混凝土原料装卸、矿渣及炉渣装卸,钢厂铁矿粉、煤粉、返矿粉、瓦斯灰及钢渣皮等粉状物料的转载,沥青搅拌站物料的转运等。因此,需要一种可以降低装卸过程污染物无组织逸散的技术来满足污染物厂界达标排放的要求。
3.目前较为有效的污染物无组织排放控制技术有以下两种:
4.(1)运输粉状物料或产品的车辆采用封闭措施,封闭的空气斜槽或输送机末端与封闭车辆卸料口紧密连接,实现点对点装卸,该技术具有操作简单、治理效果好等优势,但是存在以下困难:1.适用于新建项目,在购置封闭车厢车辆的同时还需要将物料输送廊道进行全密闭,对于现有企业,需要高成本的改造才能实现点对点装卸;2.在装卸完毕后还是会有大量肉眼可见的颗粒物逸散在空气中。
5.(2)使用可以移动的集气罩,但是必须有一个人在集气罩旁边手动操作集气罩的高度和位置,污染物容易对操作人员的健康造成伤害,操作困难较大,更不能实现污染物经处理后有组织排放的功能,如果企业人员没有手动操作,则集气罩会形同虚设,不能从根本上减少污染物排放量。
技术实现要素:
6.针对现有技术的不足,本实用新型创新地提供了一种用于粉状物料装卸过程中的污染物收集与处理装置,能自动收集粉末装卸过程中逸散的污染物并进行处理,有效减少污染物的排放量。
7.为实现上述的技术目的,本实用新型公开了一种用于粉状物料装卸过程中的污染物收集与处理装置,包括粉状物料输送装置和粉状物料运输车,所述粉状物料输送装置用于输送卸载粉状物料至所述粉状物料运输车上,还包括第一污染物浓度传感器、污染物收集罩、引风机、污染物过滤净化装置、排风管、移动机构和控制器,
8.所述第一污染物浓度传感器设置在所述粉状物料输送装置的出料口,
9.所述污染物收集罩用于收集粉状物料装卸过程中逸散的污染物,所述污染物收集罩的出口与所述污染物过滤净化装置连通,所述污染物过滤净化装置的出口与所述排风管连通,所述引风机设置在所述排风管中,
10.所述移动机构与所述污染物收集罩连接,所述移动机构、所述第一污染物浓度传感器和所述引风机分别与所述控制器电连接,所述控制器用于当所述第一污染物浓度传感器检测的污染物浓度值达到第一浓度阈值时控制所述引风机开启以及当所述第一污染物浓度传感器检测的污染物浓度值达到第二浓度阈值时控制所述移动机构将所述污染物收
集罩移动至所述第一污染物浓度传感器处。
11.进一步地,还包括第二污染物浓度传感器,所述第二污染物浓度传感器设置在所述污染物收集罩内部,所述第二污染物浓度传感器与所述控制器电连接。
12.进一步地,所述移动机构包括竖直移动机构、水平纵向移动机构和水平横向移动机构,所述竖直移动机构与所述污染物收集罩连接,所述竖直移动机构用于带动所述污染物收集罩竖直上下移动;所述水平纵向移动机构与所述竖直移动机构连接,所述水平纵向移动机构用于带动所述竖直移动机构水平纵向往复运动;所述水平横向移动机构与所述水平纵向移动机构连接,所述水平横向移动机构用于带动所述水平纵向移动机构水平横向往复运动。
13.进一步地,所述竖直移动机构包括竖直导向杆、竖直滑块、第一电机、第一齿轮、第一齿条和第一齿条座,所述竖直导向杆和所述第一齿条座竖直平行设置,所述竖直滑块套设在所述竖直导向杆上且能沿所述竖直导向杆上下滑动,所述竖直滑块、所述第一电机和所述污染物收集罩固定连接,所述第一电机的输出轴同轴连接所述第一齿轮,所述第一齿条固定在所述第一齿条座上,所述第一齿轮和所述第一齿条啮合。
14.进一步地,所述水平纵向移动机构包括水平纵向导向杆、水平纵向滑块、第二电机、第二齿轮、第二齿条和第二齿条座,所述水平纵向导向杆和所述第二齿条座水平纵向平行设置,所述水平纵向滑块套设在所述水平纵向导向杆上且能沿所述水平纵向导向杆水平纵向滑动,所述水平纵向滑块、所述第二电机和所述竖直移动机构固定连接,所述第二电机的输出轴同轴连接所述第二齿轮,所述第二齿条固定在所述第二齿条座上,所述第二齿轮和所述第二齿条啮合。
15.进一步地,所述水平横向移动机构包括水平横向导向杆、水平横向滑块、第三电机、第三齿轮、第三齿条和第三齿条座,所述水平横向导向杆和所述第三齿条座水平横向平行设置,所述水平横向滑块套设在所述水平横向导向杆上且能沿所述水平横向导向杆水平横向滑动,所述水平横向滑块、所述第三电机和所述水平纵向移动机构固定连接,所述第三电机的输出轴同轴连接所述第三齿轮,所述第三齿条固定在所述第三齿条座上,所述第三齿轮和所述第三齿条啮合。
16.进一步地,所述污染物收集罩通过伸缩软管与所述污染物过滤净化装置连接。
17.进一步地,所述污染物收集罩与所述伸缩软管的连接处抱设有抱箍,所述抱箍与所述移动机构连接。
18.进一步地,所述第一污染物浓度传感器包括颗粒物传感器和/或vocs传感器,所述第二污染物浓度传感器包括颗粒物传感器和/或vocs传感器。
19.进一步地,所述污染物过滤净化装置包括布袋除尘器和/或活性炭吸附装置。
20.本实用新型的有益效果为:
21.本实用新型的用于粉状物料装卸过程中的污染物收集与处理装置能根据粉状物料装卸过程中逸散的污染物浓度控制引风机的启停,并将污染物收集罩移动到污染物逸散的源头位置,实现自动收集污染物,收集后的污染物经过滤净化后排放,有效减少污染物的无组织逸散和排放量;全程自动控制,无需人工操作,省时省力,且减少污染物对人体造成的伤害。
附图说明
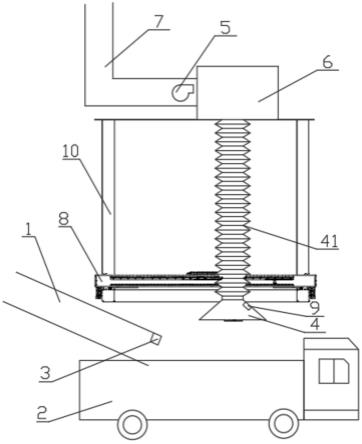
22.图1是本实用新型实施例的用于粉状物料装卸过程中的污染物收集与处理装置的结构示意图。
23.图2是本实用新型实施例的移动机构的结构示意图。
24.图中,
25.1、粉状物料输送装置;2、粉状物料运输车;3、第一污染物浓度传感器;4、污染物收集罩;41、伸缩软管;5、引风机;6、污染物过滤净化装置;7、排风管;8、移动机构;81、竖直移动机构;811、竖直导向杆;812、第一电机;813、第一齿条;814、第一齿条座;82、水平纵向移动机构;821、水平纵向导向杆;822、水平纵向滑块;823、第二电机;824、第二齿轮;825、第二齿条;826、第二齿条座;83、水平横向移动机构;831、水平横向导向杆;832、水平横向滑块;833、第三电机;9、第二污染物浓度传感器;10、支架。
具体实施方式
26.下面结合说明书附图对本实用新型提供的用于粉状物料装卸过程中的污染物收集与处理装置进行详细的解释和说明。
27.本实施例具体公开了一种用于粉状物料装卸过程中的污染物收集与处理装置(以下简称污染物收集与处理装置),如图1所示,包括粉状物料输送装置1和粉状物料运输车2,粉状物料输送装置1用于输送卸载粉状物料至粉状物料运输车2上,粉状物料输送装置1为空气斜槽、带式输送机等常用的输送设备,粉状物料运输车2为敞开式车厢的车辆,粉状物料输送装置1通过倾斜一定角度将粉状物料卸载到粉状物料运输车2上。
28.本实施例的污染物收集与处理装置还包括第一污染物浓度传感器3、污染物收集罩4、引风机5、污染物过滤净化装置6、排风管7、移动机构8和控制器,第一污染物浓度传感器3设置在粉状物料输送装置1的出料口,由于粉状物料输送装置1的出料口处为粉状物料的集中点,污染物以此处为中心进行逸散,此处产生的污染物较多,因为将第一污染物浓度传感器3设置在此处,便于准确检测污染物的浓度,在开始产生污染物的初期便能检测到。污染物收集罩4用于收集粉状物料装卸过程中逸散的污染物,污染物收集罩4的出口与污染物过滤净化装置6连通,污染物过滤净化装置6的出口与排风管7连通,引风机5设置在排风管7中。在本实施例中,污染物收集罩4通过伸缩软管41与污染物过滤净化装置6连接。伸缩软管41的进气口与污染物收集罩4的出口连接,伸缩软管41的出气口与污染物过滤净化装置6的进口连接,伸缩软管41和污染物收集罩4位于污染物过滤净化装置6的下方。污染物收集罩4呈漏斗状,进口为开口较大的一端,增大收集面积,在引风机5的吸力作用下,污染物收集罩4将下方以及周围的污染物收集并经伸缩软管41进入污染物过滤净化装置6,污染物进行过滤净化处理,净化后的气体从排气管7排出。
29.移动机构8与污染物收集罩4连接,污染物收集罩4与伸缩软管41的连接处抱设有抱箍,抱箍与移动机构8连接。伸缩软管41易于变形,在移动机构8带动污染物收集罩4运动时,伸缩软管41进行适应性形变,保证污染物收集罩4与污染物过滤净化装置6的密封性。
30.移动机构8、第一污染物浓度传感器3和引风机5分别与控制器电连接,控制器为plc控制器,控制器采用现有的控制方法,控制器用于当第一污染物浓度传感器3检测的污染物浓度值达到第一浓度阈值时控制引风机5开启以及当第一污染物浓度传感器3检测的
污染物浓度值达到第二浓度阈值时控制移动机构8将污染物收集罩4移动至第一污染物浓度传感器3处。第一浓度阈值小于或等于第二浓度阈值,在污染物浓度达到第一浓度阈值时,控制器控制引风机5开启,实现污染物收集,但是此时污染物收集罩4不一定处于污染物浓度最大处,只是起到初步引风手机的作用,第一浓度阈值设置的尽可能小,最小可为0,即只要产生污染物便开启引风机5收集污染物。第二浓度阈值根据行业特征及地区要求自行确定,如非重点地区水泥行业企业颗粒物第二浓度阈值可设定为20mg/m3。当污染物浓度值达到第二浓度阈值时,第一污染物浓度传感器3的位置信息发送给控制器,在第一污染物浓度传感器3处设置位置传感器,位置传感器将第一污染物浓度传感器3的位置信息发送给控制器,控制器接收位置信息数据后控制移动机构8带动污染物收集罩4运动到第一污染物浓度传感器3处,即污染物浓度最高处的附近,在产生污染物的中心进行收集,在污染物开始逸散时就进行收集,有效减少污染物向周围无组织的逸散。
31.控制器还能根据第一污染物浓度传感器3检测的污染物浓度值控制引风机5的风速,如果浓度较高,则提高引风机5的风速,加快收集,减少污染物的逸散。
32.本实施例的污染物收集与处理装置还包括第二污染物浓度传感器9,第二污染物浓度传感器9设置在污染物收集罩4内部,第二污染物浓度传感器9与控制器电连接。第二污染物浓度传感器9用于检测污染物收集罩4移动过程中移动路径上的污染物浓度,如果第二污染物浓度传感器9检测的移动过程中污染物浓度大于第一污染物浓度传感器3检测的浓度,控制器可控制移动机构8暂停,直至第二污染物浓度传感器9检测的污染物浓度小于第一污染物浓度传感器3检测的污染物浓度,控制器继续控制移动机构8带动污染物收集罩4向第一污染物浓度传感器3移动,此种适用于污染物已经向外逸散一部分的情况。也保证了污染物尽可能小范围的逸散。
33.如图2所示,移动机构8包括竖直移动机构81、水平纵向移动机构82和水平横向移动机构83,竖直移动机构81与污染物收集罩4连接,竖直移动机构81用于带动污染物收集罩4竖直上下移动;水平纵向移动机构82与竖直移动机构81连接,水平纵向移动机构82用于带动竖直移动机构81水平纵向往复运动;水平横向移动机构83与水平纵向移动机构82连接,水平横向移动机构83用于带动水平纵向移动机构82水平横向往复运动。移动机构8通过支架10固定在企业的墙壁上或者与污染物过滤净化装置6固定连接,通过移动机构8能实现污染物收集罩4的全方位移动。
34.如图2所示,竖直移动机构81包括竖直导向杆811、竖直滑块、第一电机812、第一齿轮、第一齿条813和第一齿条座814,竖直导向杆811和第一齿条座814竖直平行设置,竖直滑块套设在竖直导向杆811上且能沿竖直导向杆811上下滑动,竖直滑块、第一电机812和污染物收集罩4固定连接,竖直滑块和污染物收集罩4上的抱箍均与第一电机812的机身固定连接,第一电机812的输出轴同轴连接第一齿轮,第一齿条813固定在第一齿条座814上,第一齿轮和第一齿条813啮合。通过第一电机812的驱动以及第一齿轮和第一齿条813的传动,竖直滑块带动抱箍沿竖直导向杆811上下移动,从而使污染物收集罩4能上下运动,在污染物收集罩4上下运动的过程中,伸缩软管41随之缩短或伸长。
35.水平纵向移动机构82包括水平纵向导向杆821、水平纵向滑块822、第二电机823、第二齿轮824、第二齿条825和第二齿条座826,水平纵向导向杆821和第二齿条座826水平纵向平行设置,水平纵向滑块822套设在水平纵向导向杆821上且能沿水平纵向导向杆821水
平纵向滑动,水平纵向滑块822、第二电机823和竖直移动机构81固定连接,水平纵向滑块822、竖直导向杆811、第一齿条座814和第二电机823的机身固定连接,第二电机823的输出轴同轴连接第二齿轮824,第二齿条825固定在第二齿条座826上,第二齿轮824和第二齿条825啮合。通过第二电机823的驱动以及第二齿轮824和第二齿条825的传动,水平纵向滑块822带动竖直移动机构81整体和污染物收集罩4沿水平纵向导向杆821移动,从而实现污染物收集罩4在水平纵向上的移动,在污染物收集罩4水平纵向移动的过程中,伸缩软管41随之缩短或伸长,伸缩软管41自身的角度也发生相应变化。
36.水平横向移动机构83包括水平横向导向杆831、水平横向滑块832、第三电机833、第三齿轮、第三齿条和第三齿条座,水平横向导向杆831和第三齿条座水平横向平行设置,水平横向滑块832套设在水平横向导向杆831上且能沿水平横向导向杆831水平横向滑动,水平横向滑块832、第三电机833和水平纵向移动机构82固定连接,水平横向滑块832、水平纵向导向杆821、第二齿条座826和第三电机833的机身固定连接,第三电机833的输出轴同轴连接第三齿轮,第三齿条固定在第三齿条座上,第三齿轮和第三齿条啮合。通过第三电机833的驱动以及第三齿轮和第三齿条的传动,使得水平横向滑块832带动水平纵向移动机构82整体、竖直移动机构81整体和污染物收集罩4沿水平横向导向杆831移动,从而实现污染物收集罩4在水平横向上的移动,在污染物收集罩4水平横向移动的过程中,伸缩软管41随之缩短或伸长,伸缩软管41自身的角度也发生相应变化。
37.在本实施例中,水平横向导向杆831和第三齿条座的数量为两个,分别设置在水平纵向导向杆821的两端,相应的水平纵向滑块822、第二电机823和第二齿轮824的数量也为两个,两个水平横向导向杆831不仅起到导向作用,还能起到支撑水平纵向移动机构82的作用,使得整个移动机构8平稳运行。水平横向导向杆831和第三齿条座固定在支架10上。
38.第一污染物浓度传感器3包括颗粒物传感器和/或vocs传感器,第二污染物浓度传感器9包括颗粒物传感器和/或vocs传感器。对于粉末状物料,通常情况下,颗粒物和vocs同时存在,因此同时设置颗粒物传感器和vocs传感器;如果仅存在颗粒物和vocs中的一种,则第一污染物浓度传感器3和第二污染物浓度传感器9也仅采用该种污染物传感器即可。
39.污染物过滤净化装置6包括布袋除尘器和/或活性炭吸附装置,布袋除尘器用于处理颗粒物,活性炭吸附装置用于吸附净化vocs,如果污染物仅存在颗粒物和vocs中的一种,则污染物过滤净化装置6选择对应的装置即可。通常情况下,颗粒物和vocs同时存在,因此同时设置布袋除尘器和活性炭吸附装置,布袋除尘器设置在活性炭吸附装置前,先处理颗粒物再吸附净化vocs。经过污染物过滤净化装置6对污染物进行处理后排放,减少污染物的排放量。而且,通过排气管7的引导作用,使得排放的气体从无组织排放变为有组织排放。
40.本实施例的污染物收集与处理装置使用时安装在企业的墙壁上,污染物过滤净化装置6固定在墙壁上,污染物收集罩4和伸缩软管41固定在污染物过滤净化装置6的下方,移动机构8通过支架10与污染物过滤净化装置6固定连接或者固定在墙壁上,污染物收集罩4初步位于粉状物料输送装置1和粉状物料运输车2的上方,在粉状物料装卸过程中,根据第一污染物浓度传感器3和第二污染物浓度传感器9检测的污染物浓度调整污染物收集罩4的位置。
41.本实施例可在污染物产生时便进行收集,而且能将污染物收集罩4移动到污染物浓度最高处,减少污染物的逸散;收集的污染物经过滤净化后排放,有效减少污染物排放
量,提升区域环境空气质量。本装置安装简单,全自动化,使用方便,减少对人员健康的伤害,减少现有企业无封闭式车辆,购置车辆及前段设施的改造成本;避免粉状物料装卸过程中手动集气罩形同虚设;根据粉状物料的特性在污染物收集罩4后设置过滤净化装置,变无组织排放为有组织排放,以减少污染物的排放量。
42.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
43.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
44.在本说明书的描述中,参考术语“本实施例”、“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任至少一个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
45.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型实质内容上所作的任何修改、等同替换和简单改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1