一种轻量化光伏清扫机器人
本发明属于光伏电站维护设备,具体涉及一种轻量化光伏清扫机器人
背景技术:
1、光伏组件是光伏发电系统重要的核心部件,能够收集太阳能并转换为电能。随着光伏发电的广泛应用,光伏组件的运维工作显得越来越重要。光伏组件的工作环境在户外,其表面容易形成积灰、树叶、积雪和鸟粪等沉积物,组件表面的污秽造成阴影遮挡,并导致组件表面温度上升,直接影响了组件吸收的太阳辐射,这些沉积物是影响光伏发电效率的关键因素之一,严重时会造成组件的破坏,因此光伏组件定期运维扮演了越来越重要的角色。
2、针对光伏组件表面的污秽,一般采用清洗的方式进行运维,大致分为四种:人工擦拭、人工水洗、半自动机械清洗、自动清洗。前三种运维均需采用人工,不仅提高了人工成本,也增添了工人的安全隐患。
3、水洗造成水资源的大量消耗,不适合缺水地区,且使用过程中,对水枪压力的控制需要严格的要求,若水枪压力过大时,会增加光伏组件的破裂风险,从而降低使用寿命。因此光伏组件的自动无水清洁装备慢慢发展起来。本发明采用无水滚刷进行清洁。
4、随着科学技术的发展,将清洁装备技术与移动机器人技术结合,是一种高性价化、高效率的电站维护方案。但移动式光伏清洁机器人的重量一直是影响该领域发展的一个重点研究问题。为实现机器人运维灵活度更高、场地适应能力更强、携带更加方便等功能,本发明提供了一种轻量化光伏清洁机器人
技术实现思路
1、为解决上述不足,本发明提供了一种轻量化光伏清扫机器人相比较现有光伏清扫机器人,其在控制系统、自主运维能力、场地适应能力和机械结构轻量化以及续航能力等方面进行了进一步优化。本发明的技术方案如下:
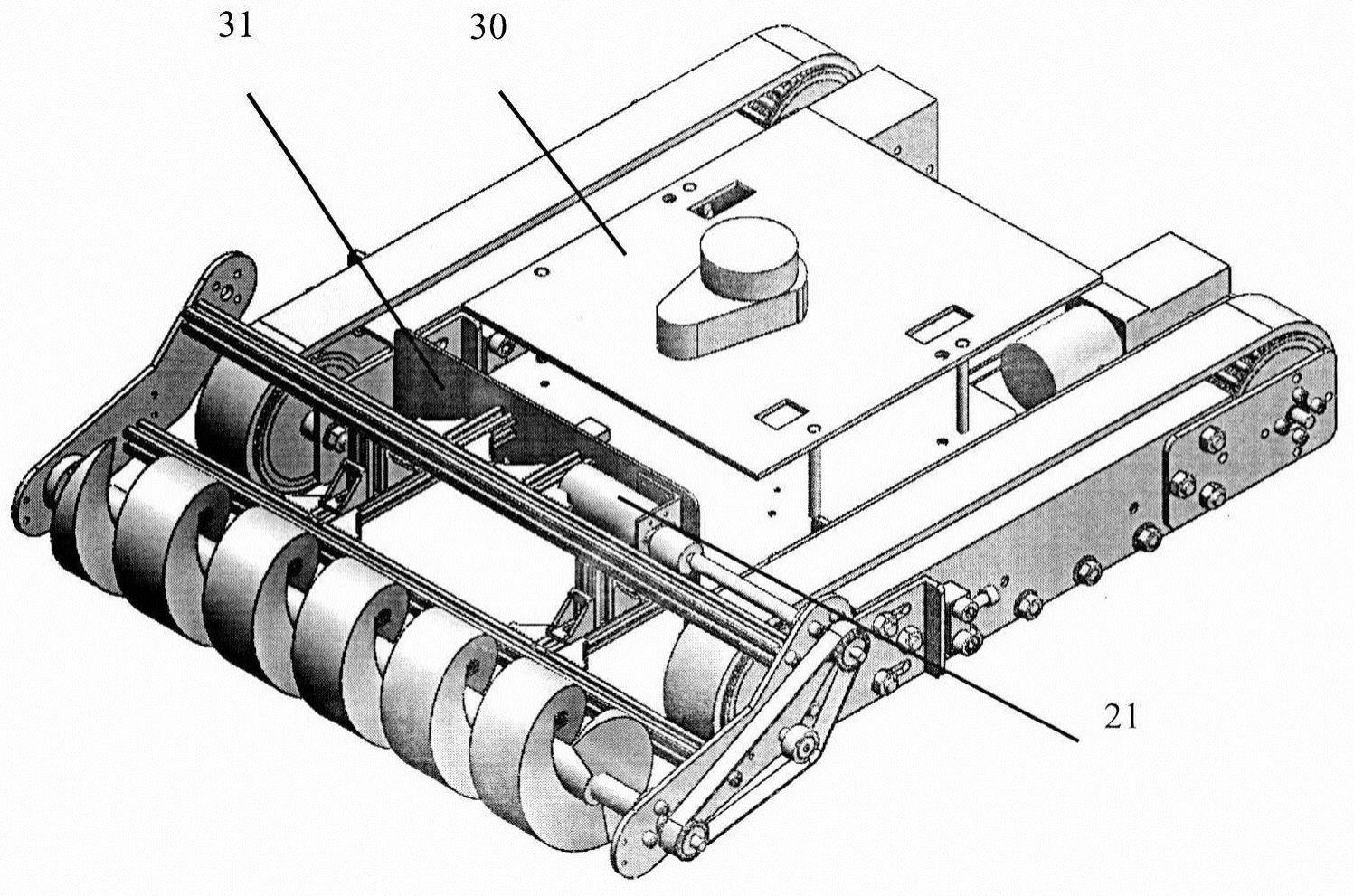
2、一种轻量化光伏清扫机器人所述机器人本体结构包括履带行走机构、清扫机构、轻量化承载机构。所述机器人控制系统包括执行层控制系统和决策层控制系统。所述履带行走机构通过铝型材连接杆连接成整体;所述承载机构固定在铝型材连接杆上;所述清扫机构底端通过铝型材连接杆与履带行走机构连接固定,上端通过螺栓和螺母与承载机构连接固定;所述机器人本体机构由执行层控制系统驱动;所述执行层控制系统由决策层控制系统控制。
3、所述履带式行走机构由两个对称的履带轮总成、两根铝型材支撑柱组成。铝型材通过螺栓与履带轮总成的侧架连接,形成“井”字形结构,基于该结构,其余零部件依次与其配合,实现整个行走机构的装配。整个履带轮总成分为前轮传动系统、后轮传动系统和承重轮系统。
4、前轮传动系统,由前导向轮、前轴、张紧装置组成。张紧装置由张紧螺栓、螺栓座和张紧支撑板组成。具体装配和张紧过程如图中局部放大图所示,2个张紧支撑板通过螺栓分别与侧架的内外侧连接,张紧支撑板上设计有u型滑槽,张紧螺栓旋进螺栓座,螺栓底部顶住张紧支撑板折弯的部分,通过调节张紧螺栓,使得固定在张紧支撑板上的前轴可以前后移动,实现履带张紧的目的。前导向轮采用过盈配合固定在前轴上,使用加厚同步履带包裹前后带轮,利用轮齿与同步带啮合,实现动力的传输。
5、后轮传动系统由行走电机、后轴、2个后轮轴承、2个后支撑板组成两个尺寸和形状完全相同的后支撑板,通过螺栓连接固定在侧架的内侧(行走电机所在一侧)和外侧,2个后轮轴承分别固定在内外两侧的支撑板上,支撑着后轴,电机输出端通过平键与后轴配合,带动后轴旋转。后轴使用平键与后驱动轮配合,传递动力。
6、承重轮系统由固定在侧架上的4根承重轮轴和与之间隙配合的4个尼龙承重轮组成,分散了带轮承重,提高了机器人的通行性。
7、清扫机构是基于2根尺寸相同铝型材连接杆连接2个滚刷支撑板作为主体框架。滚刷电机通过滚刷电机支撑架安装固定在底层板前端上,电机输出轴通过弹性联轴器与滚刷传动轴相连传输动力,传动轴另一端与固定在滚刷支撑板的轴承配合,以支撑传动轴,传动轴尾部开设键槽通过平键传递动力至滚刷带轮,带轮的轮齿与滚刷履带的啮合将动力传输至前带轮,履带采用张紧轮进行张紧,前带轮通过平键联接带动滚刷轴旋转,滚刷轴左右两端开设两个径向通孔,空心滚刷也在左右两端开设通孔,通过螺栓穿过两端通孔并利用螺母旋紧,实现滚刷的固定与配合。
8、整个机构利用铝型材连接杆与履带式行走机构连接固定,铝型材连接杆间通过t型角码和连接角件进行连接固定。
9、承载机构设计为双层形式,下层设计为折弯的铝合金底板,通过螺栓固定在履带行走机构的连接杆上,主要放置电路板、电池和电机驱动器;上层设计为透明亚克力材料的平板,主要放置激光雷达和嵌入式硬件层等硬件。
10、执行层控制系统包含主控核心、电机驱动单元、信号感知单元。所述主控核心为单片机;所述电机驱动单元包含行走电机驱动单元与滚刷电机驱动单元;所述信号感知单元包含姿态与速度感知单元与边界感知单元。通过单片机发送控制信号至行走电机驱动单元与滚刷电机单元以控制清扫机器人完成行走及清扫。并通过控制姿态与速度感知单元与边界感知单元采集清扫机器人自身状态信息和外部环境信息以确保机器人安全可靠运行。
11、决策层控制系统由主控制器和从控制器组成,二者通过局域网进行数据交换。主控制器将采集的信息进行处理分析,利用imu与里程计采集的数据进行清扫机器人的融合定位,并利用激光雷达、接近开关等传感器采集的数据构建清扫区域分层代价地图,再基于a*算法与dwa算法并根据清扫机器人当前位置与分层代价地图完成全局路径规划与局部路径规划,然后将控制指令发送给从控制器,从控制器采用无线串口发送指令给执行层控制系统从而控制机器人行走与清扫,并将采集的数据传输至主控制器以更新代价地图,实现清扫机器人自主运维。
12、清扫机器人的工作区域需要进行环境地图的构建,使得机器人可以在地图中进行路径规划。分层代价地图一种基于占据栅格地图的地图表示方法,具体包含静态地图层、障碍物层、膨胀层和光伏阵列边界层。所述静态地图层为广于清扫区域并用于定位其它障碍物或光伏阵列边界的空白地图层;所述障碍物层通过订阅激光雷达采集到的数据话题,当接收到障碍物信息时,将其置于对应栅格中并标记为占据状态,将激光雷达和障碍物之间的栅格标记为自由状态。所述膨胀层为基于激光雷达采集前方静态或动态障碍物信息据清扫机器人尺寸进行膨胀并距障碍物不同距离赋予不同代价值的地图层;所述光伏阵列边界层为不参与膨胀包含光伏阵列边界信息的虚拟障碍物地图层。
13、清扫机器人自主运维采用基于多点巡航的全覆盖清扫策略。清扫机器人采用“弓”字形的清扫路径,并根据阵列边界尺寸、机器人长度以及滚刷长度,在靠近阵列边界的位置,设置目标点,从地图最外侧开始移动,依次遍历每个目标点,最终回到起点,实现对地图的全覆盖清扫,并根据光伏阵列监测系统信息,判断是否再次清扫。
14、本发明达到的有益效果:
15、(1)铝型材通过螺栓与履带轮总成的侧架连接,形成“井”字形结构,基于该结构,其余零部件依次与其配合,实现整个行走机构的装配,这种结构的设计装配精确和牢固。
16、(2)通过采用履带行走机构并且安装并排承重轮,保证了光伏清扫机器人运行不打滑。
17、(3)通过调节张紧螺栓,使得固定在张紧支撑板上的前轴可以进行前后移动的调节,从而实现履带张紧的目的,便于安装、拆卸和实时调节。
18、(4)通过将滚刷电机安装于在底板前端支撑板上,通过弹性联轴器与滚刷传动轴相连传输动力,传动轴尾部开设键槽通过平键传递动力至滚刷带轮,通过张紧轮实现传动履带的张紧,从而保证了滚刷电机安装的牢固以及滚刷转动的稳定。
19、(5)通过采用执行层控制系统和决策层控制系统协作构建光伏清扫机器人运行环境地图、精准定位了机器人当前所在位置,实现了机器人清扫路径的规划,实现了清扫机器人自主运维。
20、(6)决策层控制系统由主、从控制器构成,协调分散控制机器人。采用分散控制的方式有利于降低对控制器性能要求,并有利于光伏清扫机器人的系统维护。
21、(7)通过imu与里程计采集的数据进行光伏清扫机器人的融合定位,提高机器人定位精度。
22、(8)通过构建分层代价地图并采用基于多点巡航的全覆盖清扫策略,提高机器人清扫过程的安全性以及清洁效率。
- 还没有人留言评论。精彩留言会获得点赞!