立杆清洁装置的制作方法
本技术涉及清洁设备,更具体地,涉及一种立杆清洁装置。
背景技术:
1、在相关技术中,立杆清洗需要人工手持喷枪清洗,此方法清洗范围有限,作业效率低,且劳动强度大,成本高,工人在高空作业还存在安全隐患。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型的一个目的在于提出一种立杆清洁装置,所述立杆清洁装置能够自动进行避障清洁。
2、根据本实用新型实施例的立杆清洁装置,包括:执行组件,所述执行组件用于清洁立杆;识别组件,所述识别组件用于识别立杆及障碍物;控制组件,所述识别组件和所述执行组件分别与所述控制组件连接,且所述控制组件用于根据所述识别组件的识别结果控制所述执行组件运动,以避让障碍物及清洁立杆。
3、根据本实用新型实施例的立杆清洁装置,通过识别组件识别立杆和障碍物,并根据识别结果控制执行组件对立杆进行清洁并避让障碍物,可以自动进行立杆清洁作业,以及自动有效避开障碍物,减少人工操作,降低了人工劳动强度,提高了作业效率,且清洁高度不受人工限制。
4、另外,根据本实用新型上述实施例的立杆清洁装置还可以具有如下附加的技术特征:
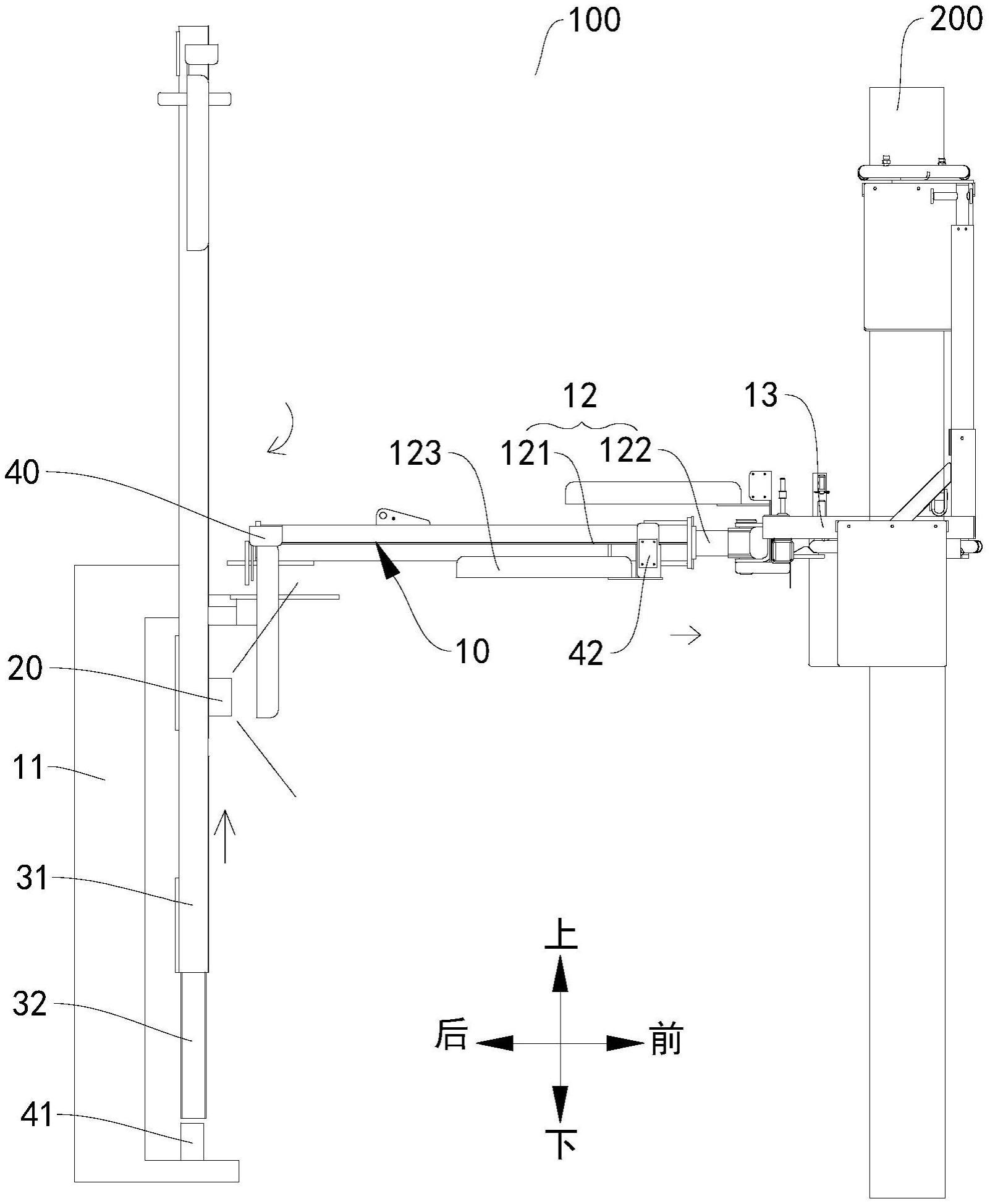
5、根据本实用新型的一些实施例,所述执行组件包括:基座;第一臂组件,所述第一臂组件安装于所述基座且相对于所述基座沿上下方向可移动;第二臂组件,所述第二臂组件与所述第一臂组件相连且相对于所述第一臂组件可活动,所述第二臂组件设有用于清洁立杆的清洁部。
6、根据本实用新型的一些实施例,所述第一臂组件包括可伸缩连接的第一臂部和第二臂部,所述第一臂部与所述基座相连且沿所述基座可上下移动,所述第二臂部与所述第二臂组件连接。
7、根据本实用新型的一些实施例,所述基座设有上下方向延伸的第一导轨,所述第一臂部设有与所述第一导轨滑动配合的第二导轨,所述基座还设有第一检测组件,所述第一检测组件用于检测所述第二导轨的位置。
8、根据本实用新型的一些实施例,所述立杆清洁装置还包括旋转驱动件,所述旋转驱动件连接所述第一臂组件和所述基座,所述旋转驱动件用于驱动所述第一臂组件相对于所述基座绕水平轴线转动。
9、根据本实用新型的一些实施例,所述第二臂组件包括:主臂,所述主臂与所述第一臂组件相连,且所述主臂垂直于所述第一臂组件延伸;两个副臂,两个所述副臂分别与所述主臂的两端可转动连接,所述主臂和所述副臂中至少一个朝向立杆的一侧设有所述清洁部。
10、根据本实用新型的一些实施例,所述主臂和所述副臂中的至少一个朝向立杆的一侧设有接近开关。
11、根据本实用新型的一些实施例,至少两个所述接近开关设于所述主臂且沿上下方向间隔布置。
12、根据本实用新型的一些实施例,至少两个所述接近开关设于所述主臂且沿所述主臂的长度方向间隔布置。
13、根据本实用新型的一些实施例,所述主臂和所述副臂朝向所述立杆的一侧设有弧形杆,所述弧形杆沿立杆的周向延伸,所述清洁部设于所述弧形杆。
14、根据本实用新型的一些实施例,所述副臂相对于所述主臂沿上下方向可移动。
15、根据本实用新型的一些实施例,所述副臂在位于所述主臂上方的上极限位置和位于所述主臂下方的下极限位置之间可移动。
16、根据本实用新型的一些实施例,所述主臂与所述第一臂组件绕水平轴线可转动连接。
17、根据本实用新型的一些实施例,所述识别组件包括定位传感器和/或视觉识别传感器。
18、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种立杆清洁装置,其特征在于,包括:
2.根据权利要求1所述的立杆清洁装置,其特征在于,所述第一臂组件包括可伸缩连接的第一臂部和第二臂部,所述第一臂部与所述基座相连且沿所述基座可上下移动,所述第二臂部与所述第二臂组件连接。
3.根据权利要求2所述的立杆清洁装置,其特征在于,所述基座设有上下方向延伸的第一导轨,所述第一臂部设有与所述第一导轨滑动配合的第二导轨,所述基座还设有第一检测组件,所述第一检测组件用于检测所述第二导轨的位置。
4.根据权利要求1所述的立杆清洁装置,其特征在于,还包括旋转驱动件,所述旋转驱动件连接所述第一臂组件和所述基座,所述旋转驱动件用于驱动所述第一臂组件相对于所述基座绕水平轴线转动。
5.根据权利要求1所述的立杆清洁装置,其特征在于,所述主臂垂直于所述第一臂组件延伸;
6.根据权利要求5所述的立杆清洁装置,其特征在于,所述主臂和所述副臂中的至少一个朝向立杆的一侧设有接近开关。
7.根据权利要求6所述的立杆清洁装置,其特征在于,至少两个所述接近开关设于所述主臂且沿上下方向间隔布置。
8.根据权利要求6所述的立杆清洁装置,其特征在于,至少两个所述接近开关设于所述主臂且沿所述主臂的长度方向间隔布置。
9.根据权利要求5所述的立杆清洁装置,其特征在于,所述主臂和所述副臂朝向所述立杆的一侧设有弧形杆,所述弧形杆沿立杆的周向延伸,所述清洁部设于所述弧形杆。
10.根据权利要求5所述的立杆清洁装置,其特征在于,所述副臂相对于所述主臂沿上下方向可移动。
11.根据权利要求10所述的立杆清洁装置,其特征在于,所述副臂在位于所述主臂上方的上极限位置和位于所述主臂下方的下极限位置之间可移动。
12.根据权利要求5所述的立杆清洁装置,其特征在于,所述主臂与所述第一臂组件绕水平轴线可转动连接。
13.根据权利要求1-12中任一项所述的立杆清洁装置,其特征在于,所述识别组件包括定位传感器和/或视觉识别传感器。
技术总结
本技术公开了一种立杆清洁装置,所述立杆清洁装置包括:执行组件,所述执行组件用于清洁立杆;识别组件,所述识别组件用于识别立杆及障碍物;控制组件,所述识别组件和所述执行组件分别与所述控制组件连接,且所述控制组件用于根据所述识别组件的识别结果控制所述执行组件运动,以避让障碍物及清洁立杆。根据本技术实施例的立杆清洁装置,通过识别组件识别立杆和障碍物,并根据识别结果控制执行组件对立杆进行清洁并避让障碍物,可以自动进行立杆清洁作业,以及自动有效避开障碍物,减少人工操作,降低了人工劳动强度,提高了作业效率,且清洁高度不受人工限制。
技术研发人员:陈华,张明耀,陈勋,彭祯桂,魏明辉,胡国球
受保护的技术使用者:长沙中联重科环境产业有限公司
技术研发日:20221014
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!