一种光伏板清扫机器人的制作方法
本技术涉及太阳能光伏板清扫,尤其涉及一种光伏板清扫机器人。
背景技术:
1、光伏发电作为新能源发电的重要组成,近来年发展迅猛,光伏电站一般建在地域开阔,阳光充足的露天环境中,在长期使用过程中,光伏板表面会积聚大量的灰尘、落叶等污物,这些污物附着在光伏板的表面会遮挡阳光,导致光伏板的发电效率降低,还可能造成光伏板产生热斑,降低光伏板的使用寿命,因此,光伏电站在运维过程中,保持光伏板表面的清洁十分重要。
2、光伏板清扫机器人可以对光伏板的表面进行清扫,主要包括机架、行走装置以及清扫装置,然而,现有技术中,行走装置的结构较复杂,例如,在cn214053023u一案中,由一台电机通过链条、链轮带动两行走轮与传动轴转动,传动轴带动另外一侧的行走轮转动,介于电机与行走轮之间的传动部件较多,并且,链条与链轮的配合存在间隙,导致链传动的精度不高,影响机器人的行走精度。
技术实现思路
1、本实用新型提供一种光伏板清扫机器人,用以解决现有技术中存在的行走装置的结构复杂、且行走精度不高的问题。
2、本实用新型实施例提供了一种光伏板清扫机器人,该光伏板清扫机器人包括机架、行走装置、清扫装置;
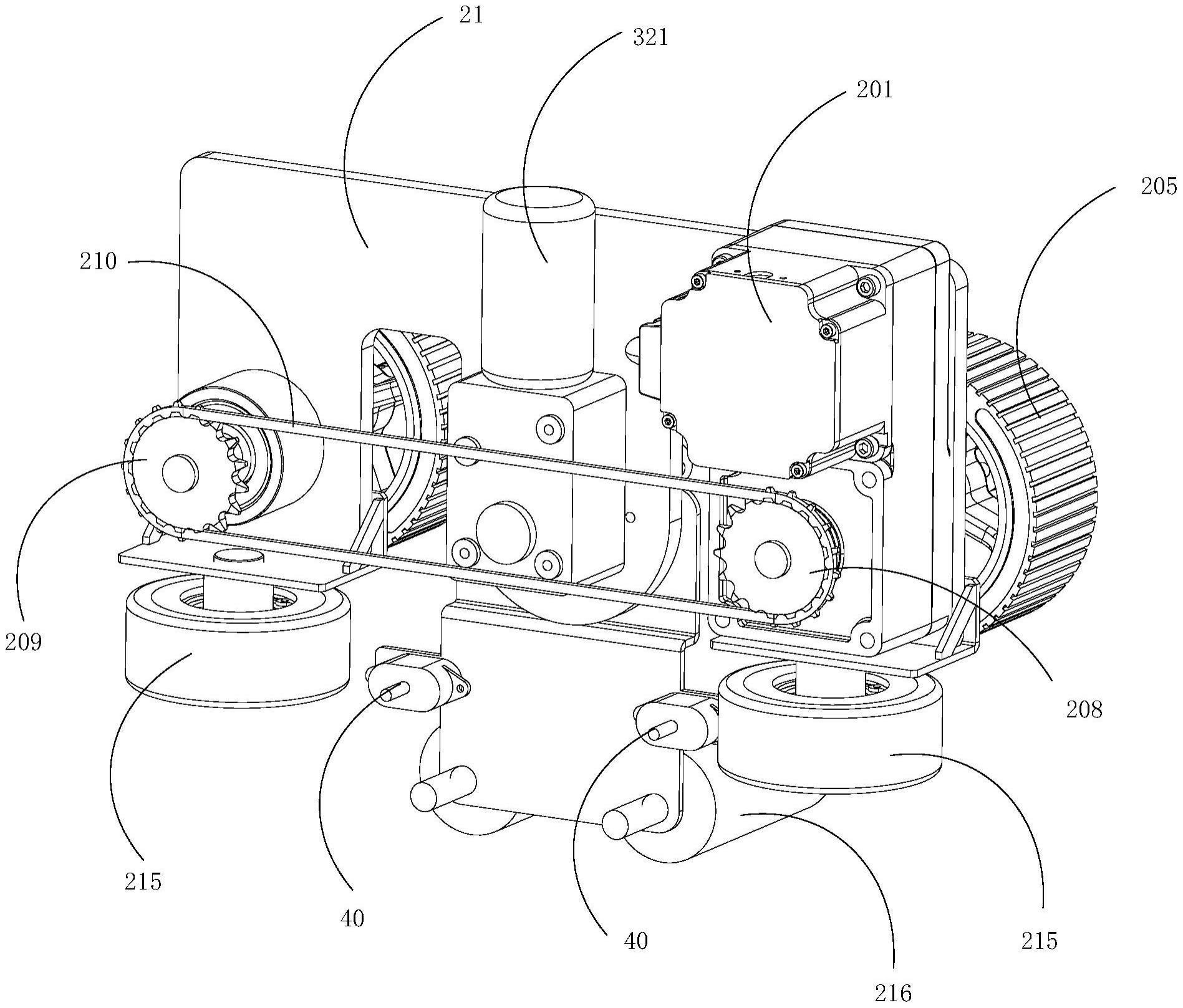
3、所述行走装置包括安装板、第一驱动电机、第一电机轴、行走轮轴、行走轮,所述安装板与所述机架连接,所述第一驱动电机设于所述安装板;
4、所述第一电机轴与所述第一驱动电机连接,且所述第一电机轴的端部嵌套于所述行走轮轴内;
5、所述行走轮轴穿设于所述安装板的第一安装孔中,所述行走轮轴通过第一法兰与所述安装板连接,且所述行走轮轴与所述第一法兰之间设置有第一轴承;所述行走轮套设于所述行走轮轴上;
6、所述清扫装置设于所述机架,用于清扫光伏板。
7、上述实施例中,第一电机轴通过嵌套方式与行走轮轴直连,从而将第一驱动电机输出的动力直接传导至行走轮轴,传动方式简单,且第一电机轴与行走轮轴配合紧密,在传动过程中不存在动力的损失,传动误差较小,控制精度较高。
8、可选的,所述行走装置还包括第一传动轮、第二传动轮、传动带、从动轴、从动轮;
9、所述第一传动轮设于所述第一电机轴远离所述行走轮轴的一端;
10、所述第二传动轮和所述从动轮设于所述从动轴的两端;
11、所述传动带套设于所述第一传动轮和所述第二传动轮上;
12、所述从动轴穿设通过所述安装板,并与所述行走轮轴并排设置。
13、可选的,所述行走装置的数量为两套,两套所述行走装置分别设置在所述机架的两端。
14、可选的,所述光伏板清扫机器人还包括传感组件和控制装置,所述传感组件设于所述光伏板清扫机器人正对光伏板侧壁的位置,所述传感组件用于检测安装位置与所述光伏板侧壁之间的间距;
15、所述控制装置与所述传感组件连接,用于根据所述传感组件测量的距离值调整两套所述行走装置中所述第一驱动电机的转速。
16、可选的,所述光伏板清扫机器人还包括中间轮组件,所述中间轮组件包括底座和中间轮,所述底座固定于所述机架,所述中间轮与所述底座转动连接。
17、可选的,所述清扫装置包括清洁毛刷以及驱动所述清洁毛刷转动的驱动装置。
18、上述可选的实施方式中,清扫装置和行走装置分别采用独立的电机进行驱动,清扫装置中毛刷的转速可以单独进行控制,从而达到最佳的清扫效果。
19、可选的,所述驱动装置包括第二驱动电机、第二电机轴、毛刷轴;
20、所述第二电机轴与所述第二驱动电机连接,且所述第二电机轴的端部嵌套于所述毛刷轴内;
21、所述毛刷轴穿设于所述安装板的第二安装孔内,所述毛刷轴通过第二法兰与所述安装板连接,且所述毛刷轴与所述第二法兰之间设置有第二轴承。
22、可选的,所述机架的顶面设置有薄膜光伏板组件,所述薄膜光伏板组件用于利用光能发电;
23、所述光伏板清扫机器人还包括电源管理模块,所述电源管理模块与所述薄膜光伏板组件连接,用于存储所述薄膜光伏组件产生的电能或向用电部件输出电能。
24、可选的,所述机架为铝型材结构。
25、可选的,所述第一驱动电机为减速电机,所述减速电机包括空心轴,所述行走轮轴穿设于所述空心轴内,并与所述空心轴通过键连接。
技术特征:
1.一种光伏板清扫机器人,其特征在于,包括机架、行走装置、清扫装置;
2.如权利要求1所述的光伏板清扫机器人,其特征在于,所述行走装置还包括第一传动轮、第二传动轮、传动带、从动轴、从动轮;
3.如权利要求1或2所述的光伏板清扫机器人,其特征在于,所述行走装置的数量为两套,两套所述行走装置分别设置在所述机架的两端。
4.如权利要求3所述的光伏板清扫机器人,其特征在于,所述光伏板清扫机器人还包括传感组件和控制装置,所述传感组件设于所述光伏板清扫机器人正对光伏板侧壁的位置,所述传感组件用于检测安装位置与所述光伏板侧壁之间的间距;
5.如权利要求3所述的光伏板清扫机器人,其特征在于,所述光伏板清扫机器人还包括中间轮组件,所述中间轮组件包括底座和中间轮,所述底座固定于所述机架,所述中间轮与所述底座转动连接。
6.如权利要求1或2所述的光伏板清扫机器人,其特征在于,所述清扫装置包括清洁毛刷以及驱动所述清洁毛刷转动的驱动装置。
7.如权利要求6所述的光伏板清扫机器人,其特征在于,所述驱动装置包括第二驱动电机、第二电机轴、毛刷轴;
8.如权利要求1或2所述的光伏板清扫机器人,其特征在于,所述机架的顶面设置有薄膜光伏板组件,所述薄膜光伏板组件用于利用光能发电;
9.如权利要求1或2所述的光伏板清扫机器人,其特征在于,所述机架为铝型材结构。
10.如权利要求1或2所述的光伏板清扫机器人,其特征在于,所述第一驱动电机为减速电机,所述减速电机包括空心轴,所述行走轮轴穿设于所述空心轴内,并与所述空心轴通过键连接。
技术总结
本技术涉及太阳能光伏板清扫技术领域,公开了一种光伏板清扫机器人,用以解决现有技术中存在的行走装置的结构复杂、且行走精度不高的问题。该光伏板清扫机器人包括机架、行走装置、清扫装置;行走装置包括安装板、第一驱动电机、第一电机轴、行走轮轴、行走轮,安装板与机架连接,第一驱动电机设于安装板;第一电机轴与第一驱动电机连接,且第一电机轴的端部嵌套于行走轮轴内;行走轮轴穿设于安装板的第一安装孔中,行走轮轴通过第一法兰与安装板连接,且行走轮轴与第一法兰之间设置有第一轴承;行走轮套设于行走轮轴上;清扫装置设于机架,用于清扫光伏板。
技术研发人员:汪明川,周春,刘振雄,章筠,黄生,孙明光,吴佳骅,何海斌
受保护的技术使用者:上海电气分布式能源科技有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!