瓶单元中的异物检测的制作方法
本发明涉及一种具有多个单元载体的容器清洗机,所述单元载体分别接收多个在载体纵向上前后相继布置的容器单元,其中所述单元载体沿输送方向被引导。本发明还涉及一种单元载体和一种容器清洗机的运行方法。
背景技术:
1、市场上销售的大量饮料装在由塑料或玻璃制成的可回收瓶中。为了清洗这些可回收瓶以便重新灌装,在灌装厂内使用清洗机,这些清洗机通过自动化方法清洗由押金系统退回的大量可回收瓶并为重新灌装做好准备。
2、本发明以容器清洗机为基础,其例如在ep1813358a2和ep2303478b1中有所描述。容器清洗机包括多个沿载体纵向延伸的单元载体,所述单元载体分别接收多个在载体纵向上前后相继布置的容器单元,其中所述单元载体通常垂直于载体纵向沿输送方向引导。输送方向通常被理解为单元载体和接收在其中的容器的移动方向,其中在容器清洗机内会发生多次转向,以便彻底清洗可回收瓶形式的容器的外侧和内侧。
3、ep1281447b1和de102015113668a1中描述了单元载体及由其接收的容器单元的可能设计。
4、单元载体例如可以用金属板通过冲压和弯曲制成。容器单元由塑料和/或钢制成并放入单元载体中。容器单元例如通过卡接连接等方式保持在单元载体中,以便在磨损或损坏的情况下在维护的框架内进行简单更换。
5、单元载体在一个回路中依次被引导经过进料区、清洗区和出料区,其中可回收瓶在进料区例如借助旋转的机械导向元件被插入容器单元中,并在出料区从容器单元中排出。
6、关于此类容器清洗机的更多后续设计和特性,请参阅khs集团关于khsinnocleanse容器清洗机的演示视频,网址为https://www.youtube.com/watch?v=353tzcptc4m。
7、通过已知的容器清洗机,即使不能完全排除因运行故障而在常规维护周期之外进行维护的可能性,也能实现很高的吞吐量和很高的自动化程度。
技术实现思路
1、在该背景下,本发明的任务是进一步提高容器清洗机的可靠性和运行安全性。此外,本发明还公开了一种用于容器清洗机的单元载体和一种容器清洗机的运行方法。
2、本发明的主题和问题的解决方案是根据权利要求1所述的一种容器清洗机、根据权利要求11所述的一种单元载体和根据权利要求13所述的一种用于运行容器清洗机的方法。
3、因此,本发明涉及一种容器清洗机,包括多个沿载体纵向延伸的单元载体,所述单元载体分别接收多个在载体纵向上前后相继布置的容器单元,其中所述载体单元通常垂直于载体纵向沿输送方向引导。根据本发明,容器单元具有至少沿第一视线对齐的第一穿通口;并且设置至少一个具有发射和接收模块的检查装置以沿第一视线进行检测。
4、本发明基于这样一种认识,即当给容器单元装载待清洗的容器、尤其可回收瓶时,容器单元中残留的异物在许多情况下会直接导致故障和运行中断。根据目前的现有技术,容器单元中残留的异物导致无法在相应的位置放入可回收瓶形式的容器,然后相应的控制系统会中断运行,以便通过操作员的人工干预来消除发生的故障。
5、在这种情况下,与空容器一起携带的异物,如木棍、石头和带子,以及损坏和/或卡住的可回收瓶,包括其碎片,都可视为异物。
6、根据本发明,在布置有容器单元的相应单元载体重新装填容器(尤其可回收瓶)之前,可借助于具有发射和接收模块的检查装置至少沿第一视线确定异物。
7、根据传统的容器清洗机的设计,通常将单元载体在回路中依次引导通过进料区、清洗区和出料区,然后将检查装置布置在出料区和进料区之间。所述的空间和功能划分原则上适用于已知类型的容器清洗机,其中在单端设计中,进料区和出料区位于容器清洗机的同一端,而在双端设计中,进料区和出料区位于容器清洗机的相对的两端。
8、可以理解的是,为了提供连续的第一视线,容器单元分别具有两个相对的穿通口,其中所有容器单元的穿通口相互对准地布置在一行中,至少在容器载体和其中接收的容器单元没有损坏或变形的情况下是这样。如下文所述,在本发明的框架内原则上也可以确定此类缺陷。
9、在本发明的框架内,如果检查装置发现所述单元载体之一或接收在其中的容器单元有异物和/或机械损伤,则可识别相应的单元载体和(如适用)相应的容器单元。随后,相应的单元载体的全部或至少部分将不再装载容器,尤其可回收瓶。
10、于是,即使容器清洗机的总产能在一定程度上降低,也可以避免立即中断运行。因此,可以对运行中断进行更好的规划,例如将其安排在产出率较低的时间段。在安排相应的维护工作时,还可以考虑相应的合格操作人员在时间上的可用性。
11、此外,还可以首先收集多个上述故障,然后在维护期间一并排除,这样不仅可以更容易地计划停机时间,而且还可以大大减少停机时间。
12、根据容器清洗机的传统设计,单元载体至少区段地在机器壳体内沿输送方向被引导,其中发射和接收模块被布置在机器壳体外或机器壳体内,当布置在机器壳体外时,其具有至少一个用于发射和接收模块的检测口。当布置在机器壳体外时,发射和接收模块为了维护目的也容易触及,并且被保护免受机器壳体的可能的潮湿和/或热的内部空间。当布置在机器壳体内部时,不需要探测口,并且发射和接收模块也能得到更好的保护,免受外部影响和损坏。
13、在本发明的框架内,对于发射和接收模块的设计得到各种设计可能性。
14、例如,可以将发射和接收模块设计成简单的光栅,在这种情况下,作为发射器单元的光源以及作为接收器单元的相关传感器在第一视线上相对布置。如果有异物沿第一视线位于至少一个容器单元内,则光源发出的光束会偏转或至少减弱,从而与自由视线相比,传感器的信号会消失或减弱。
15、然后,相关的单元载体可以向机器控制系统发出被阻塞的信号,其中机器控制系统后续不对整个相应的单元载体进行装载。通过适当的机器控制系统可单独识别和分配单元载体,从而使得也可以将被阻塞的单元载体例如转移到维护位置进行维护等。
16、根据本发明的一个优选设计,发射和接收模块由至少一个第一激光测距传感器构成。激光测距传感器可以只布置在壳体的一侧,当带有布置在其中的容器单元的单元载体在第一视线的高度上经过相互对齐的第一穿通口时,激光测距传感器可以通过背散射信号识别到那里的异物。通过所述激光测距传感器还可以相对于载体纵向确定检测到的异物的位置。相应的位置信息可以在手动或自动维护的框架内以特别有利的方式使用,以便直接清除相应的异物。
17、当然,也可以通过确定距离来检测沿载体纵向方向存在于两个相互跟随的容器单元之间的异物。
18、如果用于核查第一视线的发射和接收模块只具有恰好一个激光测距传感器,则只能从一侧探测异物。如果检测到异物,则沿着该视线位于其前方的容器单元至少在第一穿通口处是自由的,并且必要时还可以装载容器,尤其可回收瓶。然而,在被检测到的异物后面可能还存在另一个异物,其位置最初是未知的。
19、在该背景下,根据进一步的拓展,也可以在所述视线的两侧各存在一个激光测距传感器,用于核查第一视线,这样就可以通过偏移来避免输送方向上的相互干扰。如果两个激光测距传感器都在一个单元载体的同一个容器单元中发现异物,那么至少在第一穿通口的高度上,这个异物是唯一的异物。在清除异物后可以直接进行可靠的运行。如果两个激光测距传感器检测到不同的异物,则在它们之间沿着相应的单元载体会有一个区域未被核查。在相应的维护中符合要求的是,单独检查检测到的异物之间的容器单元。
20、替换或附加地,例如也可以的是,相应的单元载体在维护后在首次运行时尚不被装载可回收瓶形式的容器,以便在首次装载前通过检查装置重新检查异物。
21、如上所述,在检测到异物时,相应的单元载体不会或至少不会完全装载容器。然而,单元载体通常在维护之前空载或仅部分装载地被引导通过容器清洗机。在此,异物也有可能仅通过清洗过程就被清除,因此在重新核查时,最初存在的误差或故障不再存在。
22、相应地,相应的单元载体可以再次被装载。根据现有技术,残留的异物通常会直接导致故障,而在本发明的框架内甚至实现了特别有利的自清洁功能,从而避免了停机时间,并且仅仅短时降低清洗机的产能。
23、第一穿通口符合要求地布置在容器单元中异物通常所在的区域,因此也能被识别出来。不过,在该背景下,也符合要求的是,可以对容器单元的更大区域进行监控。
24、根据本发明的进一步拓展,在该背景下,从发射和接收模块发出的光束或激光束可以垂直于或基本垂直于载体纵向以及输送方向移动,为此,穿通口例如被设计成长形孔。然后,可以沿着设计成长形孔的穿通口在一定程度上扫描容器单元。
25、为此,例如可以将发射和接收模块垂直于载体纵向方向并且垂直于输送方向可调节地布置,其中这种调节尤其通过机器控制系统执行,尤其用于有针对性地核查容器单元。此外,光束和激光束也可以通过反射镜、光学系统或诸如此类以期望的方式移动。
26、替换或附加地,容器单元还可以具有沿着不同于第一视线的第二视线对齐的第二穿通口。于是,第一视线和第二视线可以沿输送方向或者优选垂直于输送方向以及垂直于载体纵向偏移。
27、此外,如果至少将第一穿通口设计为长形孔,则还可以考虑具有光栅栏或多个光栅类型的激光测距传感器的检查装置。
28、如上所述,第一穿通口应布置在容器单元中异物通常可能出现的位置。在该背景下,符合要求的是,第一穿通口布置在沿载体纵向延伸的中心平面的区域中,该中心平面在容器单元的常规设计中也是对称平面。
29、按照本身已知的方式,单元载体可以通过输送链组件沿输送方向引导。例如,输送装置可以具有两条相互平行的输送链。如后面所述,本发明的检查装置还可以被用来核查输送链组件的运行性能。
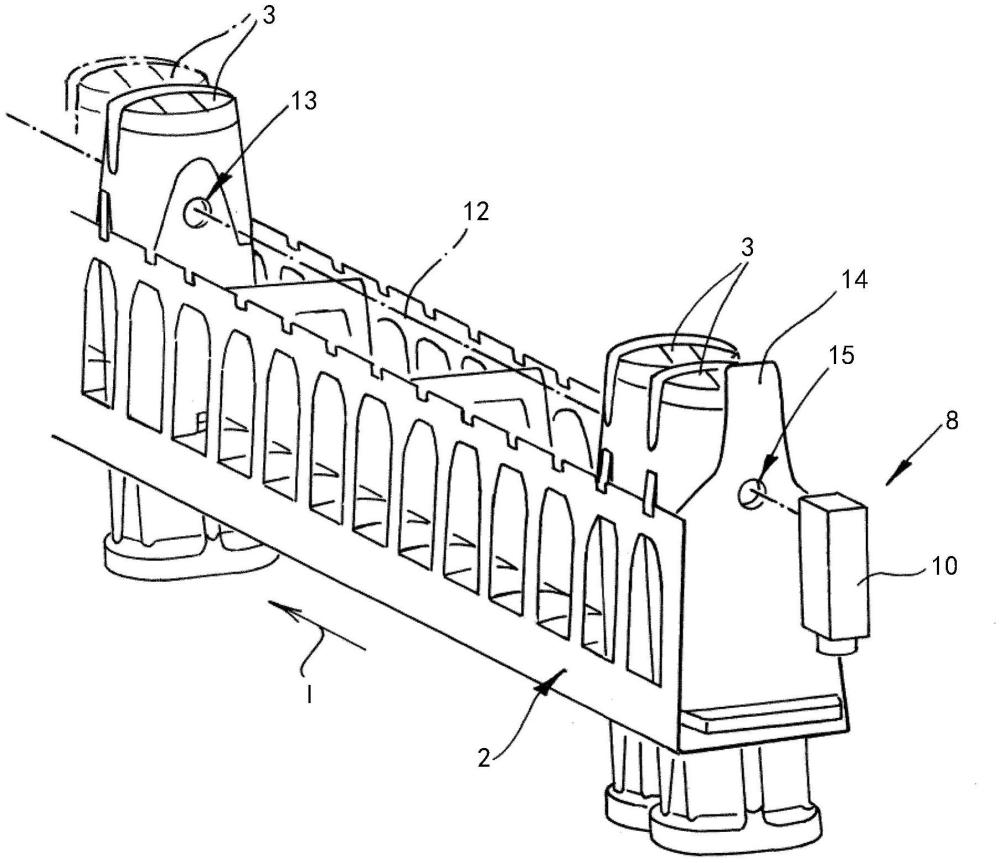
30、本发明的另一主题是一种用于容器清洗机的容器承载器,该容器承载器包括多个在载体纵向上前后相继布置的用于容器单元的接收部和相对于载体纵向布置在端侧的边界壁,其中,根据本发明,所述边界壁中的至少一个边界壁具有壁口。
31、所述壁口被设置用于实现上述的核查,其中,在装有容器单元的单元载体的情况下,上述容器单元的第一穿通口沿第一视线与所述至少一个壁口对齐。
32、关于单元载体的进一步设计,也可参考容器清洗机的实施。例如,如果要设置带一个光栅或两个相对的激光测距传感器的检查,则必须在两个端侧的边界壁上设置壁口。
33、所述至少一个壁口和所述容器单元的穿通口可以具有相同的形状或相互匹配的形状。例如,如果所述穿通口在检查装置可调节的情况下设计为长形孔,则壁口也必须相应较大地实施。如果容器单元在第一视线和至少一个第二视线的不同位置具有多个穿通口,则优选也设置多个配属的壁口。
34、最后,本发明还涉及一种用于运行容器清洗机的方法,该容器清洗机尤其如上所述地实施。沿载体纵向延伸的单元载体(每个单元载体接收多个在载体纵向上前后相继布置的容器单元)沿着输送方向在一个回路中依次经过进料区、清洗区和出料区。
35、在正常运行时,容器、尤其可回收瓶在进料区被放入容器单元中,随后在清洁区进行清洁,并在出料区从容器单元中排出。在出料区和进料区之间,对于经过的容器单元还通过至少一个检查装置进行异物识别,如果识别到异物,则相应的单元载体就被机器控制系统检测到。随后,相应的单元载体在受限制运行中不会或至少不完全装载容器。
36、该方法的优选设计也可以从容器清洗机本身的阐述中得出。
37、此外,在本方法的框架内符合要求的是,将具有异物的单元载体转移到维护位置进行维护。维护位置例如可以如此选择,以至于单个单元载体可易于触及。相应的维护既可以手动进行,也可以通过机器人等自动设备进行。原则上,也可以在维护的框架内更换单个容器单元或整个单元载体。拆下的单元载体可单独进行清理。
38、当然,如果对于维护没有专门设置的维护位置,也可以采取相应的措施。
39、如上文结合容器清洗机的说明所述,根据本发明的一个优选设计,沿载体纵向确定异物的位置。相应的位置可以进一步处理和/或输出给操作员。
40、如上文所述,检查装置符合要求地包括发射和接收模块,尤其光学发射和接收模块。在以光栅以及激光测距传感器形式描述的示例设计中,在正常运行时会产生重复的固定的信号模式。如果所有的第一穿通口都沿着第一视线精确定向,则光束或激光束会产生近似矩形的信号,具体取决于单元载体沿输送方向的速度以及穿通口的大小。这里需要注意的是,机器控制系统至少可以提前近似确定单个单元载体何时被引导经过检查装置。
41、在相互跟随的单元载体之间也得到重复的特征信号。
42、例如,如果由对齐的第一穿通口产生的信号与预期模式相比在时间上发生偏移,则由此可以推断出输送链组件的运行特性发生变化的结论,利用该输送链组件沿着输送方向引导单元载体。例如,输送链的延长可能会导致相应的偏移,其中机器控制系统可以根据记录的信号进行适当的修正。
43、此外,如果检查装置的信号偏离预期模式,也可以推断出单元载体与由它接收的容器单元定向错误。例如,如果单元载体最初相对于载体纵向方向略有弯曲,则第一穿通口不再精确地沿所述视线对齐。于是,近似矩形的脉冲就会缩短和/或变形。在这方面,通过机器控制系统也可以确定和记录较长时间上的变化。检查装置的信号还可用于校正单元载体或接收的容器单元的定向或更换相应的单元载体和/或至少一个容器单元。
- 还没有人留言评论。精彩留言会获得点赞!