一种激光清洗物体表面特征的确定方法、装置及设备与流程
本发明涉及激光清洗,特别是一种激光清洗物体表面特征的确定方法、装置及设备。
背景技术:
1、在对物体进行激光清洗时,通常将3d扫描仪和机器人相结合,用于提取激光清洗的物体的表面特征,指导激光清洗照射具对物体表面进行激光清洗。但是用3d扫描仪对物体表面特征提取时,由于3d扫描仪的可用井深小,只有几十厘米,必须采用手动的方式对3d扫描仪的扫描路径和角度进行人工规划,不能实现自动化。
技术实现思路
1、本发明要解决的技术问题是提供一种激光清洗物体表面特征的确定方法、装置及设备,可以利用激光雷达自动规划3d扫描仪的扫描路径,确定目标物体表面特征后通过激光照射具实现对目标物体的激光清洗。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种激光清洗物体表面特征的确定方法,包括:
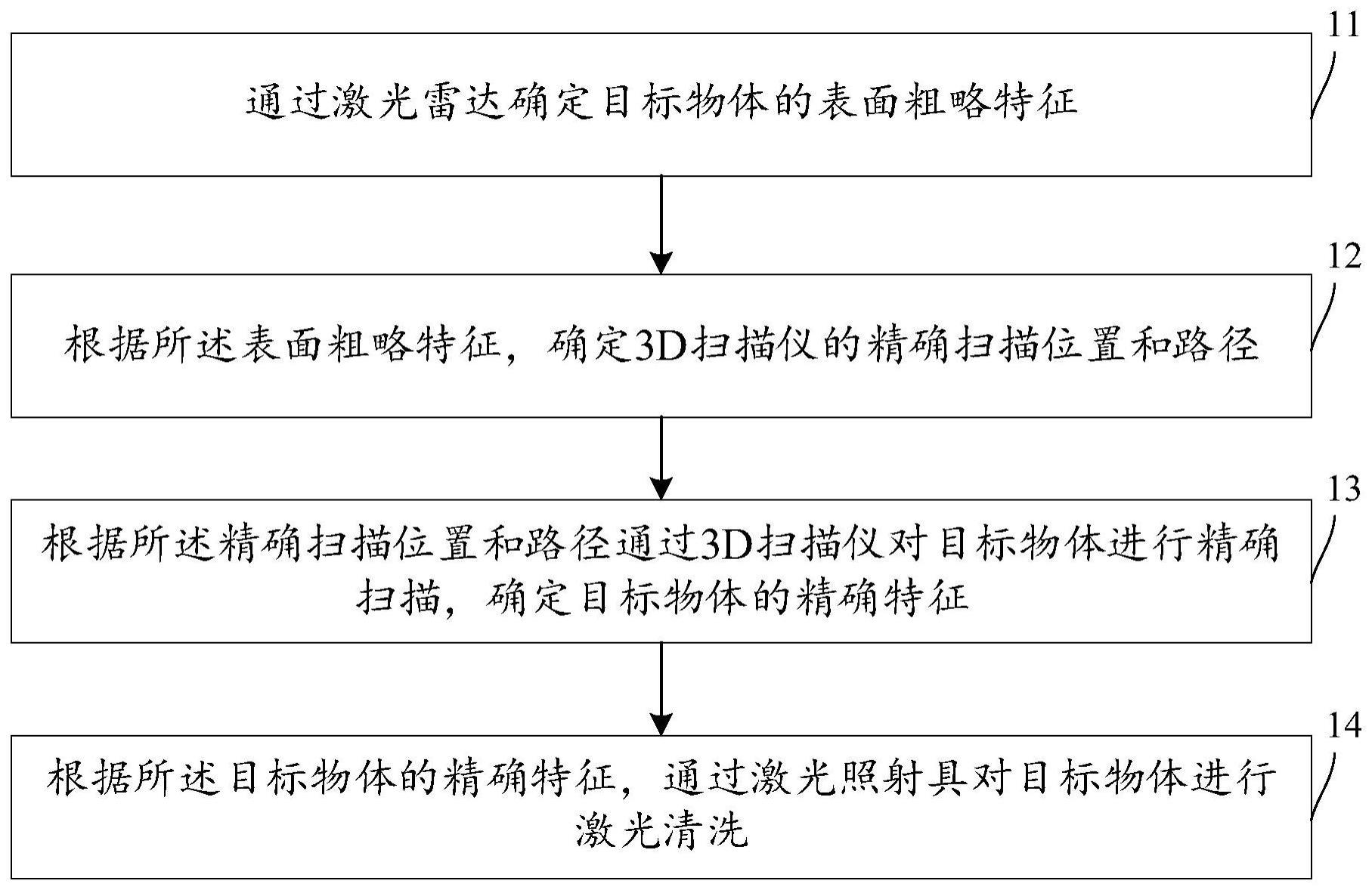
4、通过激光雷达确定目标物体的表面粗略特征;
5、根据所述表面粗略特征,确定3d扫描仪的精确扫描位置和路径;
6、根据所述精确扫描位置和路径通过3d扫描仪对目标物体进行精确扫描,确定目标物体的精确特征;
7、根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗。
8、可选的,所述激光雷达、3d扫描仪和激光照射具均通过转接板设置于移动机器人机械臂末端。
9、可选的,通过激光雷达确定目标物体的表面粗略特征,包括:
10、根据目标物体形状特征和移动机器人臂展特征确定激光雷达对目标物体进行扫描的至少一个预设点位;
11、激光雷达对目标物体在至少一个预设点位上进行扫描,得到至少一个粗略点云图。
12、可选的,所述至少一个预设点位均匀环绕目标物体,所述预设点位与目标物体中心的直线距离等于装设激光雷达的移动机器人臂展的三分之一。
13、可选的,根据所述表面粗略特征,确定3d扫描仪的精确扫描位置和路径,包括:
14、将所述至少一个粗略点云图拼接,得到反映目标物体表面粗略特征的整体粗略点云图;
15、通过预设算法对所述整体粗略点云图进行识别,确定3d扫描仪的精确扫描位置和路径。
16、可选的,根据所述精确扫描位置和路径通过3d扫描仪对目标物体进行精确扫描,确定目标物体的精确特征,包括:
17、3d扫描仪在至少一个精确扫描位置上按预设路径对目标物体进行精确扫描,得到至少一个精确点云图;
18、将所述至少一个精确点云图进行拼接,得到反应目标物体表面精确特征的整体精确点云图。
19、可选的,根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗,包括:
20、根据所述整体精确点云图,确定对目标物体的激光清洗位置,确定最小重复行走面积的激光清洗路径,通过激光照射具对目标物体进行激光清洗。
21、本发明还提供一种激光清洗物体表面特征的确定装置,包括:
22、获取模块,通过激光雷达确定目标物体的表面粗略特征;
23、处理模块,根据所述表面粗略特征,确定3d扫描仪的精确扫描位置和路径;根据所述精确扫描位置和路径通过3d扫描仪对目标物体进行精确扫描,确定目标物体的精确特征;根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗。
24、本发明还提供一种计算设备,包括:处理器、存储有计算机程序的存储器,所述计算机程序被处理器运行时,执行如上述的方法。
25、本发明还提供一种计算机可读存储介质,存储指令,当所述指令在计算机上运行时,使得计算机执行如上述的方法。
26、本发明的上述方案至少包括以下有益效果:
27、本发明的上述方案,通过激光雷达确定目标物体的表面粗略特征;根据所述表面粗略特征,确定3d扫描仪的精确扫描位置和路径;根据所述精确扫描位置和路径通过3d扫描仪对目标物体进行精确扫描,确定目标物体的精确特征;根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗。可以利用激光雷达自动规划3d扫描仪的扫描路径,确定目标物体表面特征后通过激光照射具实现对目标物体的激光清洗。
技术特征:
1.一种激光清洗物体表面特征的确定方法,其特征在于,包括:
2.根据权利要求1所述的激光清洗物体表面特征的确定方法,其特征在于,所述激光雷达、3d扫描仪和激光照射具均通过转接板设置于移动机器人机械臂末端。
3.根据权利要求2所述的激光清洗物体表面特征的确定方法,其特征在于,通过激光雷达确定目标物体的表面粗略特征,包括:
4.根据权利要求3所述的激光清洗物体表面特征的确定方法,其特征在于,所述至少一个预设点位均匀环绕目标物体,所述预设点位与目标物体中心的直线距离等于装设激光雷达的移动机器人臂展的三分之一。
5.根据权利要求3所述的激光清洗物体表面特征的确定方法,其特征在于,根据所述表面粗略特征,确定3d扫描仪的精确扫描位置和路径,包括:
6.根据权利要求3所述的激光清洗物体表面特征的确定方法,其特征在于,根据所述精确扫描位置和路径通过3d扫描仪对目标物体进行精确扫描,确定目标物体的精确特征,包括:
7.根据权利要求6所述的激光清洗物体表面特征的确定方法,其特征在于,根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗,包括:
8.一种激光清洗物体表面特征的确定装置,其特征在于,包括:
9.一种计算设备,其特征在于,包括:处理器、存储有计算机程序的存储器,所述计算机程序被处理器运行时,执行如权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,存储指令,当所述指令在计算机上运行时,使得计算机执行如权利要求1至7任一项所述的方法。
技术总结
本发明提供一种激光清洗物体表面特征的确定方法、装置及设备,所述方法包括:通过激光雷达确定目标物体的表面粗略特征;根据所述表面粗略特征,确定3D扫描仪的精确扫描位置和路径;根据所述精确扫描位置和路径通过3D扫描仪对目标物体进行精确扫描,确定目标物体的精确特征;根据所述目标物体的精确特征,通过激光照射具对目标物体进行激光清洗。本发明的方案可以利用激光雷达自动规划3D扫描仪的扫描路径,实现对目标物体的激光清洗。
技术研发人员:朱体高,李佳,车迪,张淑贞
受保护的技术使用者:核工业理化工程研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!