一种用于金属运输管管壁刮除的清洁机器人及其使用方法与流程
本发明属于金属运输管清洁,特别涉及一种用于金属运输管管壁刮除的清洁机器人及其使用方法。
背景技术:
1、金属输送管是用于对液体或气体输送的管道,常用于化工设备中对反应液和反应气体输送的结构,也可以作用于对废水和废气排放的结构,而对废水和废气长期排放后,管壁上会残留有杂质,残留的杂质未及时清理则会对管壁造成腐蚀,严重时会使金属运输管发生损坏,影响对液体和气体的正常输送,因此需要管壁清洁设备对管壁进行定期清理,以保证金属管在使用时的安全性。
2、现有的用于金属运输管管壁刮除的清洁机器人及其使用方法在使用的时候有以下缺点:
3、1、缺少对不同直径的金属管适应性结构,降低了对不同直径管壁刮除清洁的灵活性;
4、2、缺少经过金属管折弯处或螺旋状管道转向结构,因此无法对管道折弯处或螺旋状管道管壁进行有效的刮除清洁。
技术实现思路
1、本发明的目的在于针对现有的一种用于金属运输管管壁刮除的清洁机器人及其使用方法,其优点是:
2、1、拥有对不同直径的金属管适应性结构,提高了对不同直径管壁刮除清洁的灵活性;
3、2、拥有经过金属管折弯处或螺旋状管道转向结构,可以对管道折弯处或螺旋状管道管壁进行有效的刮除清洁。
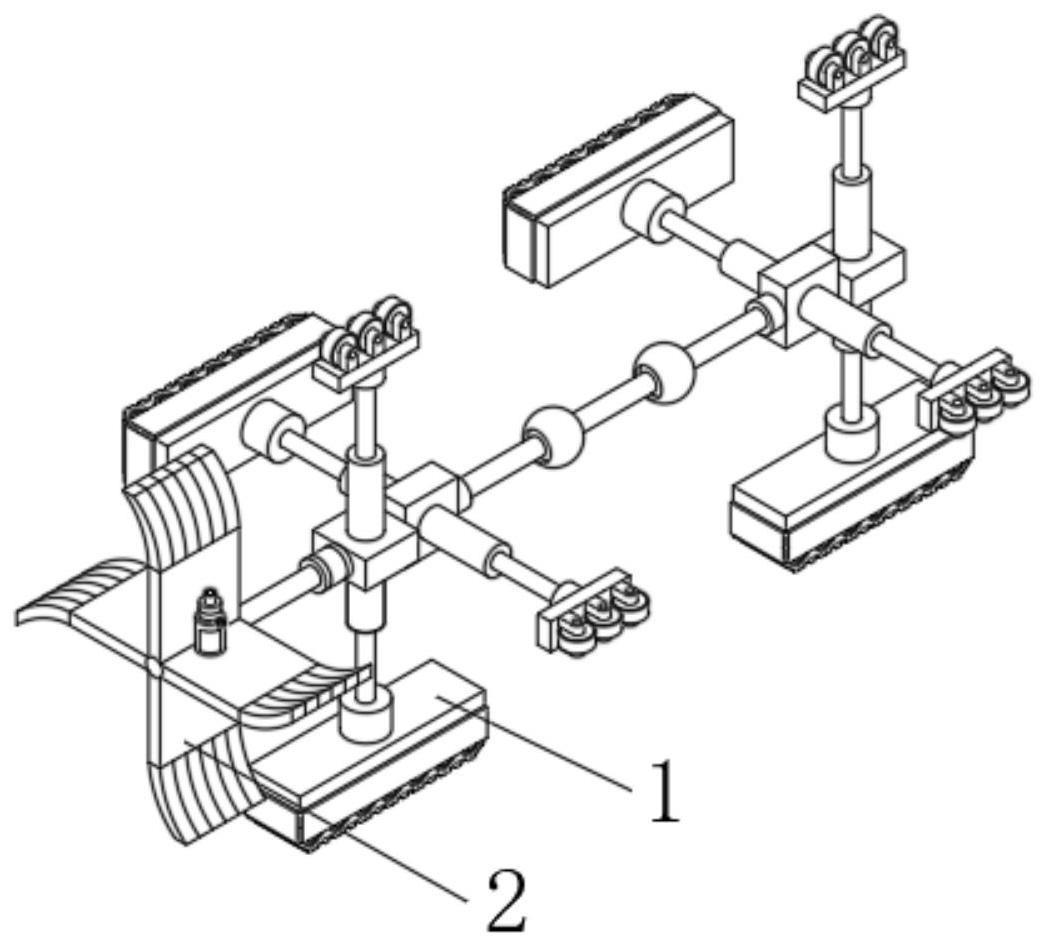
4、本发明的上述技术目的是通过以下技术方案得以实现的:一种用于金属运输管管壁刮除的清洁机器人,包括移动机构和清洁机构,所述清洁机构栓接在移动机构的前侧,所述移动机构包括连接组件、牵引组件、横动组件、横撑组件、纵动组件和纵撑组件,所述牵引组件活动连接在连接组件的两侧,所述横动组件栓接在牵引组件的前侧和后侧,所述横撑组件栓接在横动组件的右侧,所述纵动组件栓接在横动组件远离牵引组件的一侧,所述纵撑组件栓接在纵动组件的顶部,所述清洁机构包括刮除组件和清洗组件,所述刮除组件栓接在纵动组件的前侧,所述清洗组件栓接在刮除组件的前侧。
5、采用上述技术方案,通过设置移动机构和清洁机构,移动机构可以带动清洁机构在不同直径的管道内移动,同时可以在管道的弯道处进行转向移动,清洁机构可以对管道内壁进行清洁。
6、本发明进一步设置为:所述连接组件包括连接杆、前连接圆头和后连接圆头,所述前连接圆头栓接在连接杆的前侧,所述后连接圆头栓接在连接杆的后侧。
7、采用上述技术方案,通过设置连接组件,连接杆可以对前连接圆头和后连接圆头进行支撑和限位,前连接圆头可以对前侧的牵引组件移动进行限位,后连接圆头可以对后侧的牵引组件移动进行限位,以便于移动机构进行转向。
8、本发明进一步设置为:所述牵引组件包括连接球、牵引杆和固定块,所述连接球活动连接在前连接圆头内侧的前侧和后连接圆头内侧的后侧,所述牵引杆栓接在连接球远离连接杆的一侧,所述固定块栓接在牵引杆远离连接杆的一侧。
9、采用上述技术方案,通过设置牵引组件,连接球在前连接圆头内时,可以对前侧的横动组件转向进行限位,连接球在后连接圆头内时,可以对后侧的横动组件转向进行限位,牵引杆可以对连接球进行支撑和限位,固定块可以对牵引杆进行支撑和限位。
10、本发明进一步设置为:所述横动组件包括横履带、横动液压杆和横定位块,所述横定位块栓接在固定块远离连接杆的一侧,所述横动液压杆栓接在横定位块的左侧,所述横履带栓接在横动液压杆左侧的输出端。
11、采用上述技术方案,通过设置横动组件,横定位块可以对横动液压杆和横撑组件进行支撑和限位,横动液压杆可以在通电并启动后,将横履带推向金属管管壁处,横履带为由电机、转轮和履带组成的移动结构,可以在通电并启动后带动横动液压杆在管壁内移动。
12、本发明进一步设置为:所述横撑组件包括横撑液压杆、横支撑板和横转轮,所述横撑液压杆栓接在横定位块的右侧,所述横支撑部栓接在横撑液压杆右侧的输出端,所述横转轮转动连接在横支撑板的右侧。
13、采用上述技术方案,通过设置横撑组件,横撑液压杆可以在通电并启动后,将横支撑板推向金属管管壁处,横支撑板可以对横转轮进行支撑和限位,横转轮可以在与金属管管壁接触后,随着横履带的移动而移动。
14、本发明进一步设置为:所述纵动组件包括纵履带、纵动液压杆和纵定位块,所述纵定位块栓接在横定位块远离连接杆的一侧,所述纵动液压杆栓接在纵定位块的底部,所述纵履带栓接在纵动液压杆底部的输出端。
15、采用上述技术方案,通过设置纵动组件,纵定位块可以对纵动液压杆和纵撑组件进行支撑和限位,纵动液压杆可以在通电并启动后,将纵履带推向金属管管壁处,纵履带为由电机、转轮和履带组成的移动结构,可以在通电并启动后带动纵动液压杆在管壁内移动。
16、本发明进一步设置为:所述纵撑组件包括纵撑液压杆、纵支撑板和纵转轮,所述纵撑液压杆栓接在纵定位块的顶部,所述纵支撑部栓接在纵撑液压杆顶部的输出端,所述纵转轮转动连接在纵支撑板的顶部。
17、采用上述技术方案,通过设置纵撑组件,纵撑液压杆可以在通电并启动后,将纵支撑板推向金属管管壁处,纵支撑板可以对纵转轮进行支撑和限位,纵转轮可以在与金属管管壁接触后,随着纵履带的移动而移动。
18、本发明进一步设置为:所述刮除组件包括电动转杆、十字板和弧面刷,所述电动转杆栓接在纵定位块的前侧,所述十字板栓接在电动转杆的表面,所述弧面刷栓接在十字板远离电动转杆的一侧。
19、采用上述技术方案,通过设置刮除组件,电动转杆是由电机和转杆组成的电力驱动结构,可以在通电并启动后,将电能转化为旋转的机械能,并将十字板转动,十字板可以对弧面刷和清洗组件进行支撑和限位,弧面刷可以随着十字板转动,同时对金属管管壁上的污渍进行刮除清洁。
20、本发明进一步设置为:所述清洗组件包括储液罐、高压抽液泵和雾化喷头,所述储液罐栓接在十字板的表面,所述高压抽液泵栓接在储液罐远离电动转杆的一侧,所述雾化喷头栓接在高压抽液泵远离电动转杆一侧的输出端。
21、采用上述技术方案,通过设置清洗组件,储液罐可以对清洁液进行暂时性储存,高压抽液泵可以在通电并启动后,将储液罐内的清洁液抽送到雾化喷头内,雾化喷头可以将增压后的清洁液雾化后喷洒到金属管管壁上的污渍处,使污渍被清洁液软化易被清理。
22、一种用于金属运输管管壁刮除的清洁机器人的使用方法,包括以下步骤:
23、s1.移动和转向:首先,将移动机构通电并启动,之后横动液压杆会将横履带向管壁左侧推动,直至横履带与管壁接触,横撑液压杆会将横支撑板向管壁右侧推动,直至横转轮与管壁的右侧接触,之后纵动液压杆会将纵履带向管壁底部推动,直至纵履带与管壁底部接触,纵撑液压杆会将纵支撑板向管壁顶部推动,直至纵支撑板与管壁底部接触后,即可完成移动机构与金属管管壁的适应性接触,之后横履带和纵履带会带动横定位块和纵定位块在管道内壁移动,在遇到管道弯道时,牵引杆前侧的横动组件、横撑组件、纵动组件和纵撑组件会随着管道弯道进行转动移动,同时会带动连接球一同转动,连接球会在前连接圆头内进行转动,同时带动连接杆将后连接圆头内的连接球带动,后连接圆头内的连接球会带动牵引杆将后侧的横动组件、横撑组件、纵动组件和纵撑组件带动,从而实现转向的功能;
24、s2.管壁清洁:首先,将清洁机构通电并启动,再将储液罐内注满清洁液,在移动机构移动时,电动转杆会带动十字板进行转动,十字板会带动弧面刷和储液罐一同转动,高压抽液泵会将储液罐内的液体加压后输送到雾化喷头处,雾化喷头会将清洁液雾化后喷洒到金属管管壁处,让清洁液将金属管管壁上的污渍软化,之后弧面刷会对管壁上的污渍进行刮除清洁,直至完成对管壁上污渍的刮除清洁操作,最后给金属管连通供水设备,将金属管内被刮除后的污渍冲刷干净即可。
25、综上所述,本发明具有以下有益效果:
26、1、通过设置移动机构,连接组件可以对牵引组件进行支撑和限位,同时可以随着前侧的牵引组件移动带动后侧的横动组件、横撑组件、纵动组件和纵撑组件进行移动,牵引组件可以随着前侧横动组件、横撑组件、纵动组件和纵撑组件的转向带动后侧横动组件、横撑组件、纵动组件和纵撑组件进行转向,横动组件可以对横撑组件和纵动组件进行支撑的同时,还可以适应不同直径的金属管管壁,对横撑组件和纵动组件进行横向支撑,纵动组件可以对纵撑组件进行支撑的同时,还可以对横动组件、横撑组件和纵撑组件进行纵向支撑,同时可以与横动组件配合带动整体结构进行移动,横撑组件和纵撑组件可以对横动组件和纵动组件的移动进行限位,增加整体结构在移动时的稳定性;
27、2、通过设置清洁机构,刮除组件可以在通电并启动后,对金属管管壁内的污渍进行刮除,清洗组件可以在通电并启动后,对金属管管壁内的污渍喷洒清洁液,使污渍软化便于刮除组件刮除清洁。
- 还没有人留言评论。精彩留言会获得点赞!