一种海洋牧场生态养护型紫外线柔性净网机器人及其净网方法
本发明属于网箱网衣清洗设备领域,特别涉及该领域中的一种海洋牧场生态养护型紫外线柔性净网机器人及其净网方法。
背景技术:
1、目前对网箱网衣上附着物的清洗方法主要有人工清洗、药物清除和机械清洗三种,人工清洗效率低下、对网衣损害较大、附加价值较低。药物清除会污染水体,破坏养殖水质。与前两种方法相比,机械清洗的效率较高且清洗效果较好。
2、国内外现有的机械清洗设备,按清洗方式主要分为物理摩擦清洗和高压水射流清洗两类,物理摩擦清洗主要使用毛刷清洗,其原理为控制系统和运动模块使毛刷与网衣贴合并产生相对运动,从而刷落网衣附着物,其技术缺陷为:
3、(1)易损害网衣。毛刷不断摩擦网衣,易使其表面发生破损。网衣在水体中随着水流而运动,易被卷入滚动的毛刷而损坏。
4、(2)维护费时费力。毛刷易吸附杂质,需要定期清洗且清洗难度较大,清洗不当易导致毛刷的报废。
5、(3)难以保证毛刷与网衣紧密贴合,影响清洗效果。装置贴附网衣过程中,网衣易发生形变,部分区域与毛刷脱离接触,清洗效果不佳。
6、高压水射流清洗主要是利用高压泵和喷嘴喷射出的高速水流冲洗网衣,使网衣表面附着物在水流冲击力的作用下脱落,其技术缺陷为:
7、(1)清洗效果不稳定。高压水射流产生的反冲力会使清洗装置远离网衣,影响清洗效果。
8、(2)易损害网衣。大量空泡在网面附近破裂产生的巨大冲击力易使网衣破损,减损网衣寿命。
9、(3)影响水下声音环境。高压水射流设备工作过程中会产生大量噪音,干扰水下生物生活。
10、(4)耗能大。为了抵消高压水射流的反作用力,维持清洗装置在水下的稳定性,其动力装置需要为清洗装置提供同等的推力,耗能大。
11、(5)破坏水质环境,影响网箱养殖。高速水射流使清洗下来的杂质持续地悬浮在水体中,降低水体能见度,影响清洗效果,同时喷出的高速水射流容易攻击到网箱内外的有益生物,影响营养交互和网箱养殖质量。
技术实现思路
1、本发明为了解决在深海网箱养殖中网箱网衣表面易被生物附着导致网孔堵塞,影响养殖产量与质量,以及现有清洗方式易损害网衣,降低网箱使用寿命的问题,提供一种海洋牧场生态养护型紫外线柔性净网机器人及其净网方法。
2、本发明采用如下技术方案:
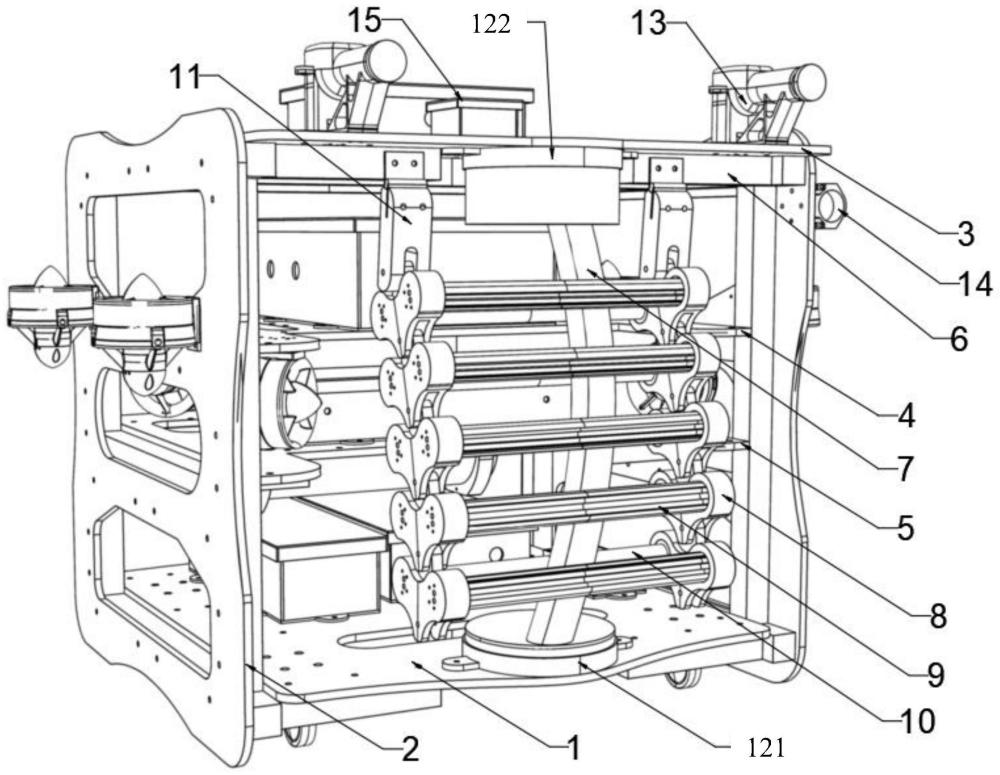
3、一种海洋牧场生态养护型紫外线柔性净网机器人,其改进之处在于:包括航行主体和设置在航行主体上的紫外线行波贴合柔性辐照模块、针对性自调频振动去污模块、载物滑台实时动态调姿模块、推进模块、主控模块和电源模块;所述的航行主体包括底板、顶板和两块主侧板,底板和顶板设置在两块主侧板之间;紫外线行波贴合柔性辐照模块设置在航行主体的一侧,包括安装在底板顶部的下限位槽和安装在顶板底部的上限位槽,上、下限位槽相对而设,在上、下限位槽之间安装舵机和螺旋脊柱,该螺旋脊柱能在舵机驱动下绕上、下限位槽旋转,还包括悬挂在顶板底部的蠕动链条,所述的蠕动链条包括两节以上结构相同的蠕动关节,蠕动关节包括左右相对的两块关节壁及安装在两块关节壁之间的紫外线灯柱和走线柱,上述的螺旋脊柱被夹在紫外线灯柱和走线柱之间,并且上下相邻蠕动关节之间的相邻关节壁彼此铰接;主控模块控制机器人工作,电源模块为机器人供电。
4、进一步的,在航行主体的底板和顶板之间还设置层二板和层三板,层二板和层三板也设置在两块主侧板之间,板与板之间通过角码与螺栓连接,并在层与层之间加设铝型材骨骼。
5、进一步的,在顶板底部安装连接件,蠕动链条铰接安装在连接件的底部;在螺旋脊柱的上方设置半开放舱体,在半开放舱体内设置舵机,该舵机的动力输出轴通过舵机固定孔与螺旋脊柱相连;在紫外线灯柱的外露侧设置紫外线灯带放置槽和石英透光板槽,在紫外线灯带放置槽内插入紫外线灯条,在石英透光板槽内插入石英板,在紫外线灯柱的两端设置固定孔;在走线柱内设置正、负走线孔,在走线柱的两端设置固定孔。
6、进一步的,所述的针对性自调频振动去污模块安装在顶板的顶部,包括两个振动装置、照明灯和摄像头识别舱,在摄像头识别舱内布置有摄像头;两个振动装置的结构相同,分别安装在顶板两端,振动装置包括上壳体和下壳体,在上、下壳体之间的空腔内安装竖向设置的振动电机和横向设置的振动头,振动头的尾部留在空腔内,头部伸出空腔外并与紫外线行波贴合柔性辐照模块同侧,在振动电机的动力输出轴顶部安装连接凸柱,连接凸柱通过连杆传动结构与振动头的尾部传动连接。
7、进一步的,所述的载物滑台实时动态调姿模块安装在层二板上,包括载物盒,在载物盒内设置滑轨、陀螺仪、步进电机驱动器和步进电机,在滑轨上安装带重物的滑台和限位器,步进电机驱动器根据陀螺仪的角度信号控制电机运行,通过电机运行带动滑台在滑轨上滑动。
8、进一步的,所述的推进模块由八个水下推进器组成,其中四个水下推进器位于层二板底部,用于控制机器人的横向运动,另外四个水下推进器平均分布于两块主侧板的外侧,用于控制机器人的竖向运动。
9、进一步的,所述的主控模块包括安装在层三板上的主控舱,主控舱内置树莓派、飞控、单片机和通讯单元,树莓派负责控制紫外线行波贴合柔性辐照模块和针对性自调频振动去污模块工作,飞控负责控制推进模块工作,单片机负责控制载物滑台实时动态调姿模块工作,通讯单元负责与外界通信。
10、进一步的,所述电源模块包括安装在底板顶部的总分电舱和电池舱,总分电舱内布置有供电元件,电池舱内布置有供电电池,供电电池通过供电元件为机器人供电。
11、进一步的,在顶板顶部的摄像头识别舱之后布置有层一控制舱,在层一控制舱中布置有控制紫外线行波贴合柔性辐照模块舵机和针对性自调频振动去污模块振动电机的电子元件;在层三板上布置水下推进器舱,在水下推进器舱内布置有控制八个水下推进器的电子元件;在底板顶部布置紫外线舱,在紫外线舱内布置有给紫外线灯柱供电的电子元件。
12、一种净网方法,适用于上述的净网机器人,其改进之处在于:将机器人附着在网箱网衣上,使紫外线行波贴合柔性辐照模块的蠕动链条靠近网箱网衣,开启舵机和紫外线灯柱内的紫外线灯条,舵机旋转带动蠕动链条的各节蠕动关节做循环起伏的波状运动,对网箱网衣进行紫外线辐照消杀,辐照消杀完毕后关闭舵机和紫外线灯柱内的紫外线灯条,再根据网箱网衣附着物的残余程度,启动针对性自调频振动去污模块对网箱网衣进行振动清洗,振动清洗完毕后关闭针对性自调频振动去污模块,随后开启推进模块使机器人以水平移动的方式依次移动到网箱网衣的其它未清理区域,进行上述的紫外线辐照消杀和振动清洗,在机器人运行过程中如果发生倾覆,则通过载物滑台实时动态调姿模块调节机器人重心,使之恢复平衡。
13、本发明的有益效果是:
14、本发明所公开的机器人,在网衣附着生物尚未成熟,附着力较弱时,采用紫外线行波贴合柔性辐照模块对其进行贴合紫外线辐照消杀清洗,既能很好的适应柔性网衣的曲面,与之紧密贴合,又能避免网衣因受强外力而损坏。紫外线辐照可以破坏微生物的内部结构,消杀过程中还可以同时杀死水中的有害菌类,净化水质,实现养护式清洗。运行时噪音较小,对水下生物不存在影响。采用针对性自调频振动去污模块进行震动清洗,能自动识别附着物的残余程度,并能根据不同残余程度智能选择不同清洗模式,可以高效完成定期清洗,提高清洗效率。采用载物滑台实时动态调姿模块进行实时动态调姿,相比于螺旋桨调姿来说耗能更低,且调姿效果更明显。推进模块采用可以精确控制的八浆矢量推进,只需一个手柄即可控制机器人清洗,可实现岸上实时观测与控制,保证作业正常,使用方便。紫外线行波贴合柔性辐照模块和针对性自调频振动去污模块均为机器人的独立结构,可拆换、易维护。可为国内外的海洋牧场网箱清洗提供一套高效、智能的水质养护型柔性清洗设备,助力我国深远海养殖产业的技术创新与可持续发展。
15、本发明所公开的净网方法,采用紫外线贴合辐照与“多模式”震动清洗结合的方式,先通过紫外线灯的集成照射削弱网衣附着物的生物附着力,再震动清洗,达到“低损害,高效率”的清洗效果,同时有效防止附着物经辐照消杀后仍挂在网衣上,影响网箱内外水体交换。另外深海环境风浪较大,为防止水体运动干扰机器人工作,并适应尼龙网衣易变形的特点,采用载物滑台实时动态调姿模块实现对机器人姿态的实时调控,保证机器人在深海环境中与网衣紧密贴合、稳定作业,高效清洗。
- 还没有人留言评论。精彩留言会获得点赞!