一种用于微重力环境下的高精密半自动孔道清理工具的制作方法
本发明涉及航天器械,具体涉及一种用于在微重力环境下进行高精密孔半自动清理的工具。
背景技术:
1、无容器实验腔体是一种基于空间站微重力环境下的实验容器,其主要应用于高熔点材料的结晶、玻璃化、凝固、形核等加工与合成过程中的基本物理规律的深入研究。
2、金属锆是无容器科学实验中常见的样品。目前,无容器实验进行的过程中,随着实验次数的增加,金属锆样品在长时间的熔融状态下产生挥发物,吸附在z方向电极孔道表面,出现“蒸镀效应”,在高温情况下形成了氧化物薄膜,这将导致样品球释放后初始带电量弱的新现象,致使样品释放和位控的成功率逐渐降低(从不低于90%到60%~70%)。因此,为避免样品挥发导致的电极孔道表面污染问题影响实验的成功率和准确性,无容器科学实验中应及时采取电极表面清理的应对措施,对电极表面的镀层进行清理。
3、实际太空环境中,电极表面的镀层清理多由航天员使用手持清洁工具实现。现有的手持清洁工具由手柄、夹头、清洁头构成,手柄与夹头底部通过螺栓连接,清洁头被放置在夹头凹槽内,通过紧定螺栓固定。使用该手持清洁工具进行电极表面的镀层清理时需要三名航天员配合工作,第一名航天员负责把持实验腔的轴心机构,第二名航天员操作吸尘器,第三名航天员负责清理电极。其中,第三名航天员清理电极时,应将手持清洁工具的清洁头伸入“前电极”或“后电极”孔道,来回摆动手臂使得清洁头沿电极孔道内壁研磨15~20圈,使氧化物薄膜破裂为氧化物碎屑,由“前电极”或“后电极”孔道内脱离。脱离的氧化物碎屑由第二名航天员操作吸尘器收集后处理。该方式的清理工作需要三名航天员配合完成,清理工作操作难度大、工作效率低、人力成本高,已逐步难以满足现代化研究的需要。
4、现有技术中虽也存在大量精密孔的电动清洁工具,但其适用环境主要为地面,其本身复杂的模块构成导致工作可靠性和稳定性的下降,并不适用于航天环境中;同时,普通电源在航天环境中的工作可靠性也有待评估且难以验证,导致现有技术中的电动清洁工具难以向微重力的航天环境中转用。
技术实现思路
1、本发明正是为了避免上述现有技术所存在的不足之处,提供了一种用于微重力环境下的高精密半自动孔道清理工具。
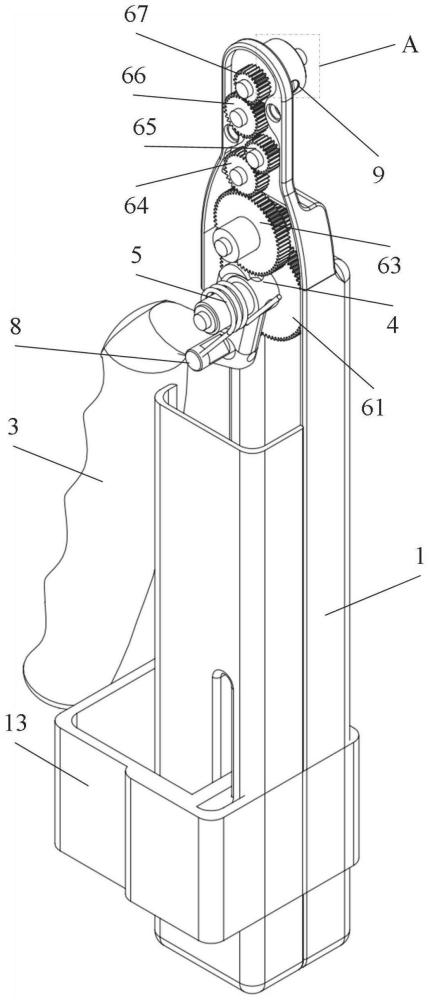
2、本发明为解决技术问题采用如下技术方案:一种用于微重力环境下的高精密半自动孔道清理工具,包括中空结构的柄体和清洁头,还设有手柄、手柄接头、扭簧、齿轮组、动力输出轴和定位螺钉;
3、所述齿轮组位于所述柄体内,包括分别通过轴及轴承与所述柄体转动安装的第一齿轮、第二齿轮、第三齿轮、第四齿轮、第六齿轮和第七齿轮,以及通过活动转轴和轴承转动安装至所述柄体上开设的弧形槽内的第五齿轮;所述第一齿轮、第二齿轮、第四齿轮、第五齿轮、第六齿轮和第七齿轮由下至上依次设置;
4、所述第二齿轮与第三齿轮共轴固连为双联齿轮结构,并分别与所述第一齿轮及第四齿轮啮合;所述活动转轴可于所述弧形槽内沿所述弧形槽滑动,所述第五齿轮保持与所述第四齿轮啮合,并在所述活动转轴沿所述弧形槽滑动接近所述第六齿轮时与所述第六齿轮啮合,且在所述活动转轴沿所述弧形槽滑动远离所述第六齿轮时与所述第六齿轮脱啮;所述第七齿轮与所述第六齿轮啮合,安装有所述第七齿轮的轴为所述动力输出轴,通过联轴器与所述清洁头轴联;所述手柄接头呈v型结构,位于所述柄体内,其底端伸出至所述柄体外,与所述手柄的顶端连接固定,顶端呈套状结构,配合套设至安装有所述第一齿轮的轴上;所述定位螺钉贯穿所述手柄接头和所述第一齿轮设置,限制所述手柄接头和所述第一齿轮的相对转动;
5、所述手柄接头与所述柄体之间还安装有所述扭簧,所述扭簧的弹力趋于驱动所述手柄的下端上摆远离所述柄体。
6、进一步的,所述第四齿轮和所述第六齿轮的齿数一致,所述第五齿轮的齿数小于所述第四齿轮和所述第六齿轮的齿数。
7、进一步的,所述弧形槽与所述第四齿轮共圆心设置,其曲率半径与所述第四齿轮及所述第五齿轮的轴线间距一致。
8、进一步的,所述柄体由结构对称的两个半壳体拼合构成。
9、进一步的,两个所述半壳体中任一沿拼缝设外凸的凸块结构,另一相应沿拼缝设内凹的凹槽结构,所述凸块结构配合卡设至所述凹槽结构中,将两个所述半壳体密封拼合;两个所述半壳体通过各连接螺钉安装固定。
10、进一步的,所述柄体和手柄的外表面均为光滑弧面。
11、进一步的,还包括紧定螺钉;
12、所述动力输出轴通过紧定螺钉与所述输出联轴器安装固定,所述清洁头与所述输出联轴器胶接连接。
13、进一步的,所述齿轮组由镍钛合金材料激光熔融一体成型,其表面氮化硬化处理;
14、所述柄体和手柄五轴铣削一体成型,所述柄体上用于安装各所述轴承的轴承孔表面氮化硬化处理。
15、进一步的,还包括设于柄体外部的扎带,所述扎带用于绑扎固定所述手柄。
16、进一步的,所述手柄接头的拐点处固设有连接销,所述扭簧套设于安装所述第一齿轮的轴承上,其一端定压于所述柄体的内侧壁上,另一端顶压于所述连接销上。
17、本发明提供了一种用于微重力环境下的高精密半自动孔道清理工具,具有以下有益效果:
18、1、本发明通过齿轮组中各齿轮之间的配合构成了一个单向加速传动系统,以航天员压动手柄的力为驱动力,经该单向加速传动系统驱动清洁头转动,实现电极孔道表面氧化物薄膜的清理,为提高无容器实验腔体实验的成功率提供了保障。
19、2、本发明相较于手动清洁工具,有效降低了清理工作的操作难度和劳动强度,提高了清理工作的工作效率。
20、3、本发明使用时只需以手掌操作,一名宇航员可同时完成无容器实验腔体的拿取和电极孔道的清理工作,一定程度上降低了清理工作的人力成本。
21、4、本发明结构紧凑,在满足功能的基础上最大程度简化结构,以确保清理工具工作的可靠性,同时也具备了空间实验开展时操作的功效性和轻便性。
22、5、本发明的表面整体设计为平滑曲面,手柄形状和最大开合角符合人体工效学设计要求,具有良好的使用安全性和舒适性。
技术特征:
1.一种用于微重力环境下的高精密半自动孔道清理工具,包括中空结构的柄体(1)和清洁头(2),其特征在于:还设有手柄(3)、手柄接头(4)、扭簧(5)、齿轮组(6)、动力输出轴(7)和定位螺钉(31);
2.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述第四齿轮(64)和所述第六齿轮(66)的齿数一致,所述第五齿轮(65)的齿数小于所述第四齿轮(64)和所述第六齿轮(66)的齿数。
3.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述弧形槽(11)与所述第四齿轮(64)共圆心设置,其曲率半径与所述第四齿轮(64)及所述第五齿轮(65)的轴线间距一致。
4.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述柄体(1)由结构对称的两个半壳体拼合构成。
5.根据权利要求3所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:两个所述半壳体中任一沿拼缝设外凸的凸块结构,另一相应沿拼缝设内凹的凹槽结构,所述凸块结构配合卡设至所述凹槽结构中,将两个所述半壳体密封拼合;两个所述半壳体通过各连接螺钉(12)安装固定。
6.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述柄体(1)和手柄(3)的外表面均为光滑弧面。
7.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:还包括紧定螺钉(9);
8.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述齿轮组(6)由镍钛合金材料激光熔融一体成型,其表面氮化硬化处理;
9.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:还包括设于柄体(1)外部的扎带(13),所述扎带(13)用于绑扎固定所述手柄(3)。
10.根据权利要求1所述的一种用于微重力环境下的高精密半自动孔道清理工具,其特征在于:所述手柄接头(4)的拐点处固设有连接销(8),所述扭簧(5)套设于安装所述第一齿轮(61)的轴承上,其一端定压于所述柄体(1)的内侧壁上,另一端顶压于所述连接销(8)上。
技术总结
本发明公开了一种用于微重力环境下的高精密半自动孔道清理工具,涉及航天器械技术领域,其手柄接头底端伸出至柄体外,与手柄的顶端连接固定,顶端配合套设至第一齿轮的轴上,上部通过定位螺钉与第一齿轮限位,手柄接头与柄体之间还安装有扭簧;第七齿轮的轴为动力输出轴,通过联轴器与清洁头轴联;齿轮组位于柄体内,设有可与第六齿轮间断啮合的第五齿轮,将手柄的摆动单向传递至清洁头。通过齿轮组中各齿轮之间的配合构成了一个单向加速传动系统,以航天员压动手柄的力为驱动力,经该单向加速传动系统驱动清洁头转动,实现电极孔道表面氧化物薄膜的清理,为提高无容器实验腔体实验的成功率提供了保障。
技术研发人员:朱锟鹏,施云高,李申申,罗长源,张孝俣
受保护的技术使用者:常州先进制造技术研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!