定日镜清洗系统的制作方法
本技术涉及定日镜的清洗领域,尤其是涉及一种清洁效率高的定日镜清洗系统。
背景技术:
1、定日镜为太阳能设备中重要的部件之一,其镜面的光洁度是重要的参数之一,进而针对定日镜镜面的清洁设备层出不穷,大部分的定日镜清洁设备基于移动车之上,车上装配定日镜的清洁组件,车移动至定日镜附近并利用清洁组件进行清洁作业,如中国专利公开号为cn115569877a所公开的一种定日镜清洗车。现有公开的车类清洁设备的技术方案可便捷的应用在定日镜之间间距较大的情况下,但车的加装、改造的成本高,或者根据需求进行生产制造的成本高,导致清洁的作业成本高且对场地要求高。
2、因此,如何设计并制造出一款能高效清洁、成本交低且定日镜安装场地要求低的定日镜清洗系统是本领域技术人员需要解决的技术问题之一。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本实用新型的目的在于提供一种清洁效率高的定日镜清洗系统。
2、为实现上述目的,本实用新型采用以下技术方案:
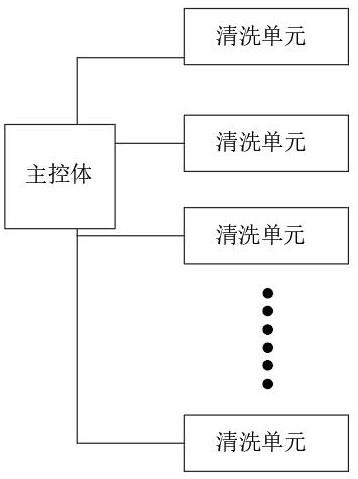
3、一种定日镜清洗系统,其包括主控体及多个清洗单元,其中:
4、每个所述清洗单元包括一台无人机及多台清洗机;
5、所述无人机及任一所述清洗机均与主控体无线连接;
6、所述无人机具有机笼,其通过所述机笼转运清洗机;
7、所述清洗机与机笼磁吸连接。
8、进一步优选的:所述机笼具有进出口,在所述进出口的两侧壁均设置横杆;
9、两个所述横杆相互平行。
10、进一步优选的:所述横杆的两端装配支脚,所述支脚设置点状的支撑位。
11、进一步优选的:所述支脚由多个凸环构成,所述凸环的直径大于所述横杆直径;
12、所述支撑位为所述凸环与定日镜的接触位。
13、进一步优选的:所述多个凸环沿横杆的轴向间隔设置。
14、进一步优选的:所述主控体内置控制单元及信号收发单元,所述控制单元与信号收发单元电性连接。
15、进一步优选的:所述无人机内置无人机信号收发单元、无人机状态采集单元、无人机位置采集单元及无人机控制单元;
16、所述无人机信号收发单元、无人机状态采集单元、无人机位置采集单元均与无人机控制单元电性连接。
17、进一步优选的:所述清洗机为扫地机器人,其内置清洗机状态采集单元、清洗机位置采集单元、清洗机控制单元及清洗机信号收发单元;
18、所述清洗机状态采集单元、清洗机位置采集单元及清洗机信号收发单元均与清洗机控制单元电性连接。
19、采用上述技术方案后,本实用新型与背景技术相比,具有如下优点:
20、本实用新型利用一台控制体与多个清洗单元连接,从而控制多个清洗单元对不同区域内的定日镜进行同步清洁,提高清洁效率,大大减小定日镜安装场地的限制;另,本实用新型中所述清洗单元包括无人机及多台清洗机,一台无人机对多台清洗机进行转运,达到一台清洗机连续清洗多个定日镜的目的,进一步提高了清洗效果,降低清洗成本;
21、本实用新型中所述的无人机的支脚与定日镜的顶面采用电接触的接触方式进行支撑,在确保能将清洗机转运到位的同时,避免对定日镜镜面造成二次污染。
技术特征:
1.定日镜清洗系统,其特征在于:其包括主控体及多个清洗单元,其中:
2.根据权利要求1所述定日镜清洗系统,其特征在于:所述机笼具有进出口,在所述进出口的两侧壁均设置横杆;
3.根据权利要求2所述定日镜清洗系统,其特征在于:所述横杆的两端装配支脚,所述支脚设置点状的支撑位。
4.根据权利要求3所述定日镜清洗系统,其特征在于:所述支脚由多个凸环构成,所述凸环的直径大于所述横杆直径;
5.根据权利要求4所述定日镜清洗系统,其特征在于:所述多个凸环沿横杆的轴向间隔设置。
6.根据权利要求1所述定日镜清洗系统,其特征在于:所述主控体内置控制单元及信号收发单元,所述控制单元与信号收发单元电性连接。
7.根据权利要求1所述定日镜清洗系统,其特征在于:所述无人机内置无人机信号收发单元、无人机状态采集单元、无人机位置采集单元及无人机控制单元;
8.根据权利要求1所述定日镜清洗系统,其特征在于:所述清洗机为扫地机器人,其内置清洗机状态采集单元、清洗机位置采集单元、清洗机控制单元及清洗机信号收发单元;
技术总结
本技术公开一种定日镜清洗系统,其包括主控体及多个清洗单元,每个所述清洗单元包括一台无人机及多台清洗机;所述无人机及任一所述清洗机均与主控体无线连接;所述无人机具有机笼,其通过所述机笼转运清洗机;所述清洗机与机笼磁吸连接。本技术利用一台控制体与多个清洗单元连接,从而控制多个清洗单元对不同区域内的定日镜进行同步清洁,提高清洁效率,大大减小定日镜安装场地的限制。
技术研发人员:谭戎,黄明义,吴建东
受保护的技术使用者:厦门天源欧瑞科技有限公司
技术研发日:20230223
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!