绝缘子清理机器人的制作方法
本技术涉及机械手,尤其涉及一种绝缘子清理机器人。
背景技术:
1、变电站高压电气设备大多在户外安装,常年运行下其表面会积污,同时受大气环境影响,在潮湿气象条件下设备还常常发生闪络,造成停电事故,同时还对设备本身造成不可恢复性损伤。目前,对输电线路绝缘子的清洁是防止污闪事故发生的有效举措。
2、如申请号为cn202020941412.6的一种中国专利,公开了一种可自动清洗绝缘子的装置及设有该装置的空气净化器,其通过在绝缘子箱内部设置多根与绝缘子的轴线平行设置的进水管,并在进水管上安装喷水端朝向绝缘子表面的喷头,实现了对绝缘子的清洗;申请号为cn202221101505.3的一种中国专利,公开了一种脏污绝缘子清洗系统,其在箱体内转动连接有用于固定绝缘子的框架和对绝缘子进行清洗的清洗件,实现了在绝缘子转动的过程中对绝缘子进行清洗。
3、可以看出,上述清理方式均需要将绝缘子拆卸下来,而拆卸的前提是将设备停电,影响用电的同时,也加大了工作量,使得工作效率低下。
技术实现思路
1、本实用新型的目的在于提供一种绝缘子清理机器人,以解决相关技术中绝缘子清理不能实现带电作业的技术问题。
2、为了解决上述技术问题,本实用新型提供的技术方案在于:
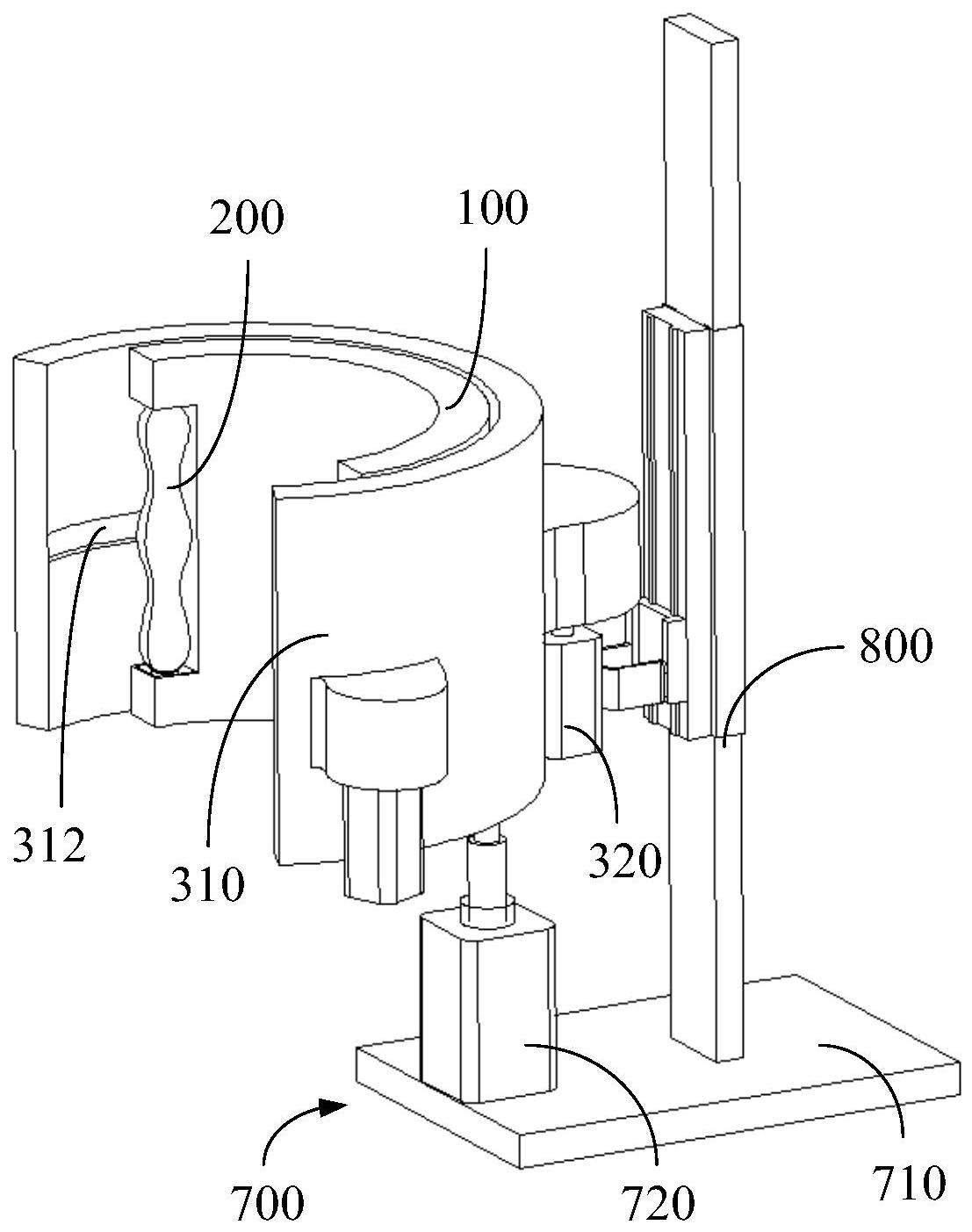
3、本实用新型提供的绝缘子清理机器人,包括:内安装架、滚刷、第一旋转驱动组件;
4、所述内安装架设有横截面呈半圆形的第一容纳槽;
5、两组所述滚刷相互平行设置于所述内安装架,并关于所述第一容纳槽的轴线对称分布于所述第一容纳槽开口的两侧;
6、所述第一旋转驱动组件与所述内安装架传动连接,以驱动所述内安装架绕所述第一容纳槽的轴线转动。
7、进一步的,所述第一旋转驱动组件包括外固定架;
8、所述外固定架设有与所述第一容纳槽的轴线相重合的第二容纳槽,并通过所述第二容纳槽套设于所述内安装架;
9、所述内安装架的横截面呈扇形,其外壁通过滑动结构与所述外固定架连接,以可绕所述第二容纳槽的轴线转动。
10、进一步的,所述滑动结构包括滑块和滑槽;
11、所述滑块设置于所述内安装架的外壁,并沿所述内安装架的周向延伸;
12、所述滑槽设置于所述第二容纳槽的槽面,并沿所述第二容纳槽槽面的周向延伸。
13、进一步的,所述第一旋转驱动组件还包括第一旋转驱动器和齿轮;
14、所述第一旋转驱动器设置于所述外固定架,并与所述齿轮传动连接,所述齿轮的轴线与所述第一容纳槽的轴线平行;
15、沿所述滑块的长度方向,所述滑块背离所述第一容纳槽的表面设有外齿,所述外齿与所述齿轮啮合。
16、进一步的,所述绝缘子清理机器人还包括第二旋转驱动组件;
17、所述滚刷与所述内安装架转动配合;
18、所述第二旋转驱动组件设置于所述内安装架,并与所述滚刷传动连接,以驱动所述滚刷绕其自身轴线转动。
19、进一步的,所述第二旋转驱动组件包括第二旋转驱动器;
20、所述第二旋转驱动器的输出轴与所述滚刷的其中一端部键连接,所述滚刷的另一端部通过固定块与所述内安装架转动连接。
21、进一步的,所述固定块包括滑动部和固定部;
22、所述滑动部设有u型槽;
23、所述固定部与所述滑动部可拆卸连接,以封堵所述u型槽的开口,并设有与所述u型槽连通的盲孔,以使所述滚刷穿过所述u型槽至所述盲孔。
24、进一步的,所述绝缘子清理机器人还包括弹性件;
25、所述固定块和所述第二旋转驱动器均与所述内安装架滑动配合;
26、多个所述弹性件设置于所述内安装架,并分别与所述固定块和所述第二旋转驱动器对应连接,使两组所述滚刷具有相向运动的趋势。
27、进一步的,所述滚刷包括滚子本体和固定于所述滚子本体的刷毛;
28、沿所述滚子本体的轴向,所述刷毛呈凹凸起伏延伸。
29、进一步的,所述绝缘子清理机器人还包括升降驱动组件;
30、所述升降驱动组件与所述外固定架传动连接,以驱动所述外固定架沿所述第二容纳槽的轴向移动。
31、综合上述技术方案,本实用新型提供的绝缘子清理机器人所能实现的技术效果在于:
32、在本申请中,第一容纳槽的横截面呈半圆形,如此内安装架在沿绝缘子的径向朝向或远离绝缘子运动时,可对应实现绝缘子进出第一容纳槽,避免了内安装架与绝缘子两端的线路产生干涉;两组滚刷相互平行设置于内安装架,并关于第一容纳槽的轴线对称分布于第一容纳槽开口的两侧,如此设计,使得滚刷与第一容纳槽的轴线平行,绝缘子处于容纳槽中时,滚刷与绝缘子平行,可实现对绝缘子侧面的清理;第一旋转驱动组件与内安装架传动连接,在第一旋转驱动组件的带动下,内安装架绕第一容纳槽的轴线转动,并同步带动两组滚刷转动,如此,两组滚刷可沿绝缘子的周向实现对绝缘子所有侧面的清理。
33、由此可见,采用该绝缘子清理机器人,解决了相关技术中绝缘子清理不能实现带电作业的技术问题,保证了正常用电,同时采用该绝缘子清理机器人清理绝缘子,提高了清理效率,节省了人力。
技术特征:
1.一种绝缘子清理机器人,其特征在于,包括:内安装架(100)、滚刷(200)、第一旋转驱动组件(300);
2.根据权利要求1所述的绝缘子清理机器人,其特征在于,所述第一旋转驱动组件(300)包括外固定架(310);
3.根据权利要求2所述的绝缘子清理机器人,其特征在于,所述滑动结构包括滑块(120)和滑槽(312);
4.根据权利要求3所述的绝缘子清理机器人,其特征在于,所述第一旋转驱动组件(300)还包括第一旋转驱动器(320)和齿轮(330);
5.根据权利要求2所述的绝缘子清理机器人,其特征在于,所述绝缘子清理机器人还包括升降驱动组件(700);
6.根据权利要求1所述的绝缘子清理机器人,其特征在于,所述绝缘子清理机器人还包括第二旋转驱动组件(400);
7.根据权利要求6所述的绝缘子清理机器人,其特征在于,所述第二旋转驱动组件(400)包括第二旋转驱动器(410);
8.根据权利要求7所述的绝缘子清理机器人,其特征在于,所述固定块(500)包括滑动部(510)和固定部(520);
9.根据权利要求8所述的绝缘子清理机器人,其特征在于,所述绝缘子清理机器人还包括弹性件(600);
10.根据权利要求1所述的绝缘子清理机器人,其特征在于,所述滚刷(200)包括滚子本体和固定于所述滚子本体的刷毛;
技术总结
本技术涉及机械手技术领域,尤其涉及一种绝缘子清理机器人,旨在解决相关技术中绝缘子清理不能实现带电作业的技术问题。该绝缘子清理机器人包括内安装架、滚刷、第一旋转驱动组件;内安装架设有横截面呈半圆形的第一容纳槽;两组滚刷相互平行设置于内安装架,并关于第一容纳槽的轴线对称分布于第一容纳槽开口的两侧;第一旋转驱动组件与内安装架传动连接,以驱动内安装架绕第一容纳槽的轴线转动。通过采用该绝缘子清理机器人,保证了正常用电,同时采用该绝缘子清理机器人清理绝缘子,提高了清理效率,节省了人力。
技术研发人员:许建国,宋东海,辛立明,缪弼东,梁景昆,高峰,张斌,黄永辉,齐佳风
受保护的技术使用者:中铁电气化局集团有限公司
技术研发日:20230317
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!