管道内壁激光清洗机器人用无线控制手柄及其控制终端的制作方法
本技术涉及管道内壁激光清洗控制领域,具体涉及一种管道内壁激光清洗机器人用无线控制手柄及其控制终端。
背景技术:
1、激光除锈的原理是,用激光照射在钢管表面,让钢管表面的铁锈吸收激光的能量,从而产生热膨胀系数的改变,铁锈会松动,除锈过程中会有高强度的震动,这种震动会让松动的铁锈直接被激光所震碎成为粉尘,从钢管表面被清除。
2、管道内壁激光清洗机器人是将爬行机器人技术和激光除锈技术相结合,形成的一种既能进行激光除锈,又能在钢管管道内爬行的机器人装置。
3、爬行机器人由携带激光头的机器人和控制箱组成,自带动力驱动系统,爬行机器人可以在管道内自动行走,并能执行管道内壁激光除锈作业。
4、现有的爬行机器人大多采用控制箱提供的操作界面进行操作作业,存在移动受限、屏幕操作不如实体按键操作更直观高效等。
5、有些采用有线手柄进行操作作业,有线手柄有一定的控制灵活性,但是,移动性能会受有线手柄和控制箱之间的连接线的限制。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种管道内壁激光清洗机器人用无线控制手柄及其控制终端,以克服上述现有技术中的不足。
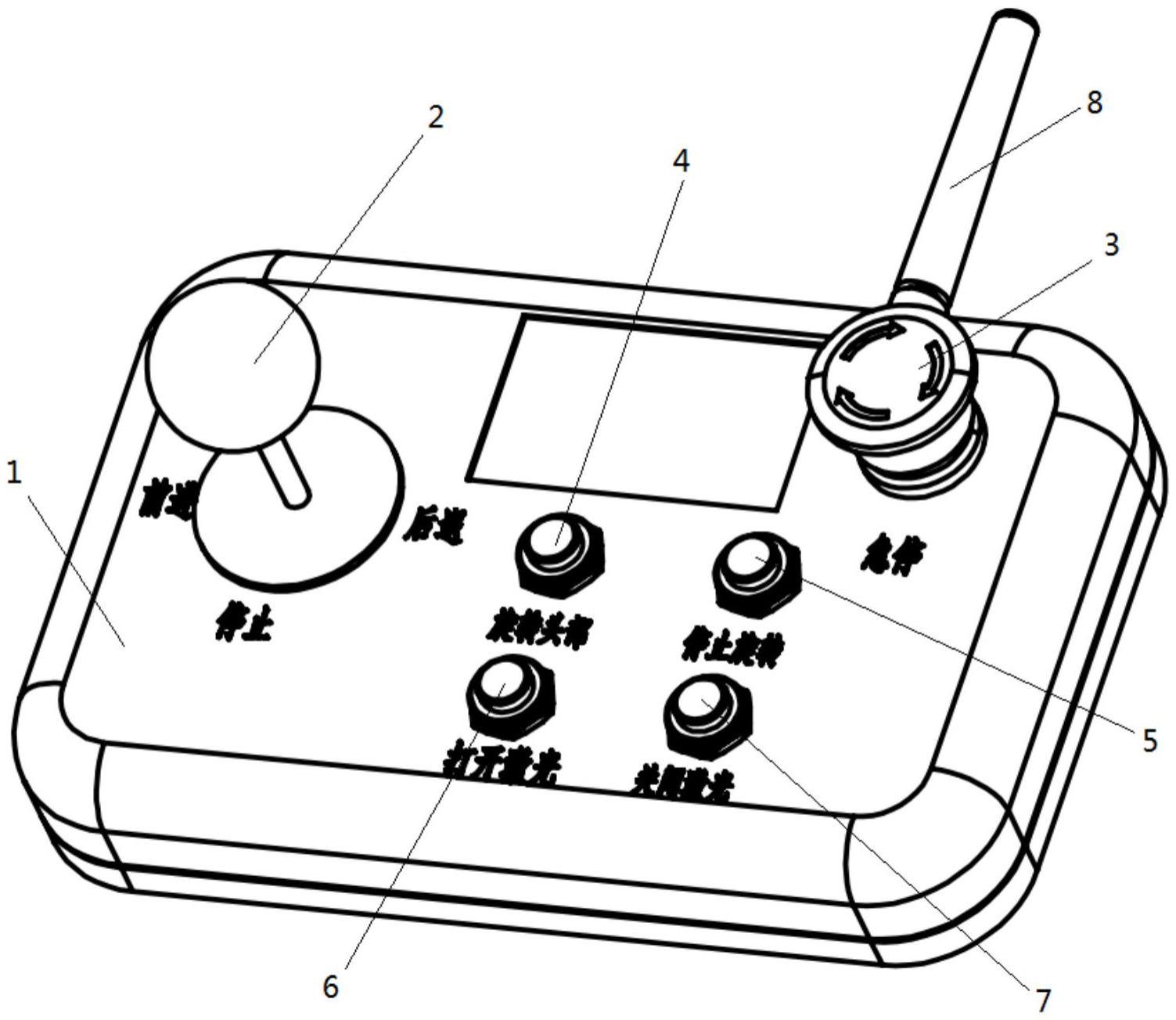
2、本实用新型解决上述技术问题的技术方案如下:一种管道内壁激光清洗机器人用无线控制手柄,包括:外壳以及与外壳相固定的摇杆模块、急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关、电路板和第一无线网卡,摇杆模块具备前进开关、后退开关和停止开关,摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关的正极分别与电路板的pin1~8引脚电连接,以及负极均与电路板的gnd引脚电连接;第一无线网卡与电路板电连接。
3、本实用新型的有益效果是:摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关分别闭合,则对应爬行机器人前进、后退、暂停、急停、头部开始旋转、头部停止旋转、开激光、关激光功能,而摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关的闭合信号则可以由电路板通过第一无线网卡发送给控制箱,然后由控制箱根据对应闭合信号控制机器人执行对应指令;
4、采用无线控制手柄替代控制箱的操作屏和有线手柄,从而在进行钢管管道激光除锈作业过程中,既保证了除锈作业能正常操作,又保证了操作人员具有比较大范围的移动性,利于灵活控制和安全作业的需求。
5、在上述技术方案的基础上,本实用新型还可以做如下改进。
6、进一步,摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关均采用常开型短路开关。
7、进一步,第一无线网卡采用wifi通讯。
8、进一步,第一无线网卡采用esp8266 wifi无线模组。
9、进一步,电路板上所采用芯片的型号为stm32f103rct6。
10、基于上述技术方案,本实用新型还提供一种控制终端,包括:控制箱、第二无线网卡和无线控制手柄,第二无线网卡与控制箱内的主板电连接,第二无线网卡与第一无线网卡无线连接。
11、采用上述进一步的有益效果为:由于摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关均为短路开关,因此,短路开关处于断开状态时,电路板上芯片的pin1~8引脚对应的pin角处于高阻态状态;短路开关处于短路状态时,电路板上芯片的pin1~8引脚对应的pin角处于低电平状态,从而电路板上的芯片就可以根据摇杆模块中摇杆的拨动/开关按下的动作,得知要进行什么操作,并将所对应的操作指令通过第一无线网卡发送给第二无线网卡,然后再由第二无线网卡传输给控制箱内的主板;
12、当控制箱内主板的信号输出连接爬行机器人时:摇杆模块中的摇杆向左拨动一次或多次时,机器人前进;摇杆模块中的摇杆向右拨动一次或多次时,机器人后退;摇杆模块中的摇杆向上或向下拨动一次或多次时,机器人停止移动;头部旋转开始开关按下一次或多次时,机器人头部旋转;头部旋转停止开关按下一次或多次时,机器人头部停止旋转;开激光开关按下一次或多次时,激光器打开;关激光开关按钮按下一次或多次时,激光器关闭;急停开关3是紧急情况下,让机器人停止移动、机器人头部停止旋转、激光器关闭,急停开关3被按下一次或者多次时,都可实现急停;
13、采用无线控制手柄替代控制箱的操作屏和有线手柄,从而在进行钢管管道激光除锈作业过程中,既保证了除锈作业能正常操作,又保证了操作人员具有比较大范围的移动性,利于灵活控制和安全作业的需求。
14、进一步,第二无线网卡采用esp8266 wifi无线模组。
技术特征:
1.一种管道内壁激光清洗机器人用无线控制手柄,其特征在于,包括:外壳(1)以及与外壳(1)相固定的摇杆模块(2)、急停开关(3)、头部旋转开始开关(4)、头部旋转停止开关(5)、开激光开关(6)、关激光开关(7)、电路板(8)和第一无线网卡(9),所述摇杆模块(2)具备前进开关、后退开关和停止开关,所述摇杆模块(2)的前进开关、后退开关、停止开关以及急停开关(3)、头部旋转开始开关(4)、头部旋转停止开关(5)、开激光开关(6)、关激光开关(7)的正极分别与所述电路板(8)的pin1~8引脚电连接,以及负极均与所述电路板(8)的gnd引脚电连接;所述第一无线网卡(9)与所述电路板(8)电连接。
2.根据权利要求1所述的一种管道内壁激光清洗机器人用无线控制手柄,其特征在于,所述摇杆模块(2)的前进开关、后退开关、停止开关以及急停开关(3)、头部旋转开始开关(4)、头部旋转停止开关(5)、开激光开关(6)、关激光开关(7)均采用常开型短路开关。
3.根据权利要求1所述的一种管道内壁激光清洗机器人用无线控制手柄,其特征在于,所述第一无线网卡(9)采用wifi通讯。
4.根据权利要求3所述的一种管道内壁激光清洗机器人用无线控制手柄,其特征在于,所述第一无线网卡(9)采用esp8266 wifi无线模组。
5.根据权利要求1所述的一种管道内壁激光清洗机器人用无线控制手柄,其特征在于,所述电路板(8)上所采用芯片的型号为stm32f103rct6。
6.一种控制终端,其特征在于,包括:控制箱(10)、第二无线网卡(11)和如权利要求1~5任一项所述无线控制手柄,所述第二无线网卡(11)与所述控制箱(10)内的主板电连接,所述第二无线网卡(11)与所述第一无线网卡(9)无线连接。
7.根据权利要求6所述的一种控制终端,其特征在于,所述第二无线网卡(11)采用esp8266 wifi无线模组。
技术总结
本技术涉及管道内壁激光清洗机器人用无线控制手柄,摇杆模块具备前进开关、后退开关和停止开关,摇杆模块的前进开关、后退开关、停止开关以及急停开关、头部旋转开始开关、头部旋转停止开关、开激光开关、关激光开关的正极分别与电路板的pin1~8引脚电连接,以及负极均与电路板的GND引脚电连接;第一无线网卡与电路板电连接。一种控制终端,第二无线网卡与控制箱内的主板电连接,第二无线网卡与第一无线网卡无线连接。本技术的有益效果为:在进行钢管管道激光除锈作业过程中,既保证了除锈作业能正常操作,又保证了操作人员具有比较大范围的移动性,利于灵活控制和安全作业的需求。
技术研发人员:李震,刘阳,王亦军,叶小威
受保护的技术使用者:宝宇(武汉)激光技术有限公司
技术研发日:20230331
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!