一种机器人高压零件清洗机的制作方法
本技术涉及零件清洗,尤其涉及一种机器人高压零件清洗机。
背景技术:
1、经检索,申请号为cn201420475447.x的专利文件公开了机器人高压零件清洗机,具有框架体、工件安装架,所述框架体具有外框体、内框体,所述外框体、内框体之间铺设第一支撑架,所述第一支撑架包括内支撑架、外支撑架;所述工件安装架包括安装板、位于安装板底部的底支架,所述安装板置于在内支撑架、外支撑架上,所述底支架置于在外框体、内框体上;
2、上述现有技术中,通过机器人上的机械手控制喷淋设备的移动,能够对汽车上的一些高压零件进行喷淋,虽然能够对一些零件进行喷淋清洗,但是对于套管类的零件却无法进行有效的清洗,由于套管类零件的内壁无法被清洗到,因此,现在提出一种机器人高压零件清洗机。
技术实现思路
1、本实用新型的目的是为了解决现有技术中的缺点,而提出的一种机器人高压零件清洗机。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种机器人高压零件清洗机,包括清洗箱,所述清洗箱的内壁固定连接有底板,所述底板的顶部固定连接有隔板,所述隔板的顶部通过取件机构连接有呈均匀分布的取件杆,所述清洗箱的内壁通过驱动机构连接有呈均匀分布的清洗杆,所述清洗杆上设置有清洗机构。
4、优选地,所述取件机构包括与隔板顶部相抵的取件板,所述取件板的顶部固定连接有取件把手,位于隔板两侧的所述隔板底部与取件杆的顶部固定连接,所述清洗杆上套设有取件环,所述取件环与取件杆固定连接。
5、优选地,所述驱动机构包括与清洗箱内壁固定连接的电动推杆,所述电动推杆的伸缩端固定连接有驱动板,所述驱动板的底部固定连接有直齿条,位于底板下方的所述清洗箱的外壁对称开设有与清洗箱内壁贯通的移动口,所述直齿条贯穿移动口并与清洗箱的内底部滑动连接。
6、优选地,所述清洗杆的顶部贯穿底板并与底板转动连接,所述清洗杆的底部与清洗箱的内底部转动连接,位于底板下方的所述清洗杆外壁固定连接有驱动齿轮,其中两个所述驱动齿轮与直齿条啮合,相邻两个所述驱动齿轮之间相互啮合。
7、优选地,所述清洗机构包括呈均匀分布的清洗柱,位于底板上方的所述清洗杆外壁与清洗柱固定连接。
8、优选地,所述隔板的两侧均与清洗箱的内壁固定连接。
9、相比现有技术,本实用新型的有益效果为:
10、1、本设备在使用时,利用清洗机构、驱动机构,通过机械手或者人工将一些套管的零件分别套在清洗杆上,并在清洗箱的内部加入清洗液,然后开启电动推杆,电动推杆会通过驱动板控制直齿条进行往返运动,由于直齿条与驱动齿轮啮合,且相邻两个齿轮之间啮合,所以直齿条不断往返运动的过程中会带动多个清洗杆的来回转动,来回转动的清洗杆可以通过清洗柱对套管零件的内壁进行有效的清洗,从而可以完成对套管类零件内壁的清洗。
11、2、本设备在使用时,利用取件机构,当套管零件清洗完后,可以向上移动取件把手,取件把手会通过取件板带动取件杆的上移,取件杆会通过取件环带动清洗杆上的多个套管零件上移,从而可以将清洗完后的套管零件取出。
技术特征:
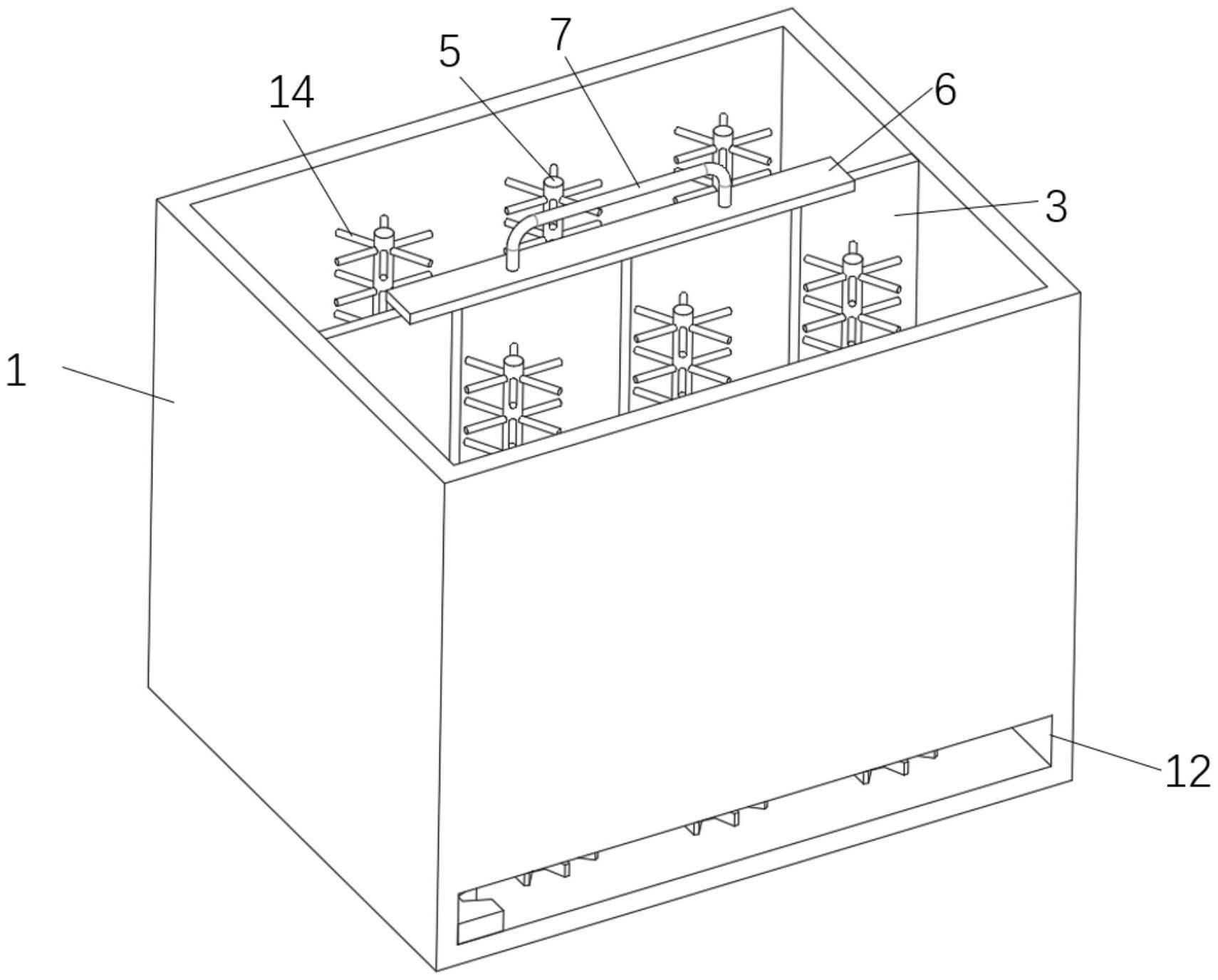
1.一种机器人高压零件清洗机,包括清洗箱(1),其特征在于,所述清洗箱(1)的内壁固定连接有底板(2),所述底板(2)的顶部固定连接有隔板(3),所述隔板(3)的顶部通过取件机构连接有呈均匀分布的取件杆(4),所述清洗箱(1)的内壁通过驱动机构连接有呈均匀分布的清洗杆(5),所述清洗杆(5)上设置有清洗机构。
2.根据权利要求1所述的一种机器人高压零件清洗机,其特征在于,所述取件机构包括与隔板(3)顶部相抵的取件板(6),所述取件板(6)的顶部固定连接有取件把手(7),位于隔板(3)两侧的所述隔板(3)底部与取件杆(4)的顶部固定连接,所述清洗杆(5)上套设有取件环(8),所述取件环(8)与取件杆(4)固定连接。
3.根据权利要求1所述的一种机器人高压零件清洗机,其特征在于,所述驱动机构包括与清洗箱(1)内壁固定连接的电动推杆(9),所述电动推杆(9)的伸缩端固定连接有驱动板(10),所述驱动板(10)的底部固定连接有直齿条(11),位于底板(2)下方的所述清洗箱(1)的外壁对称开设有与清洗箱(1)内壁贯通的移动口(12),所述直齿条(11)贯穿移动口(12)并与清洗箱(1)的内底部滑动连接。
4.根据权利要求3所述的一种机器人高压零件清洗机,其特征在于,所述清洗杆(5)的顶部贯穿底板(2)并与底板(2)转动连接,所述清洗杆(5)的底部与清洗箱(1)的内底部转动连接,位于底板(2)下方的所述清洗杆(5)外壁固定连接有驱动齿轮(13),其中两个所述驱动齿轮(13)与直齿条(11)啮合,相邻两个所述驱动齿轮(13)之间相互啮合。
5.根据权利要求1所述的一种机器人高压零件清洗机,其特征在于,所述清洗机构包括呈均匀分布的清洗柱(14),位于底板(2)上方的所述清洗杆(5)外壁与清洗柱(14)固定连接。
6.根据权利要求1所述的一种机器人高压零件清洗机,其特征在于,所述隔板(3)的两侧均与清洗箱(1)的内壁固定连接。
技术总结
本技术公开了一种机器人高压零件清洗机,包括清洗箱,所述清洗箱的内壁固定连接有底板,所述底板的顶部固定连接有隔板,所述隔板的顶部通过取件机构连接有呈均匀分布的取件杆,所述清洗箱的内壁通过驱动机构连接有呈均匀分布的清洗杆。本技术在使用时,通过机械手或者人工将一些套管的零件分别套在清洗杆上,并在清洗箱的内部加入清洗液,然后开启电动推杆,电动推杆会通过驱动板控制直齿条进行往返运动,由于直齿条与驱动齿轮啮合,且相邻两个齿轮之间啮合,所以直齿条不断往返运动的过程中会带动多个清洗杆的来回转动,来回转动的清洗杆可以通过清洗柱对套管零件的内壁进行有效的清洗,从而可以完成对套管类零件内壁的清洗。
技术研发人员:淡贤平,张超
受保护的技术使用者:重庆同肯机械制造有限公司
技术研发日:20230407
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!